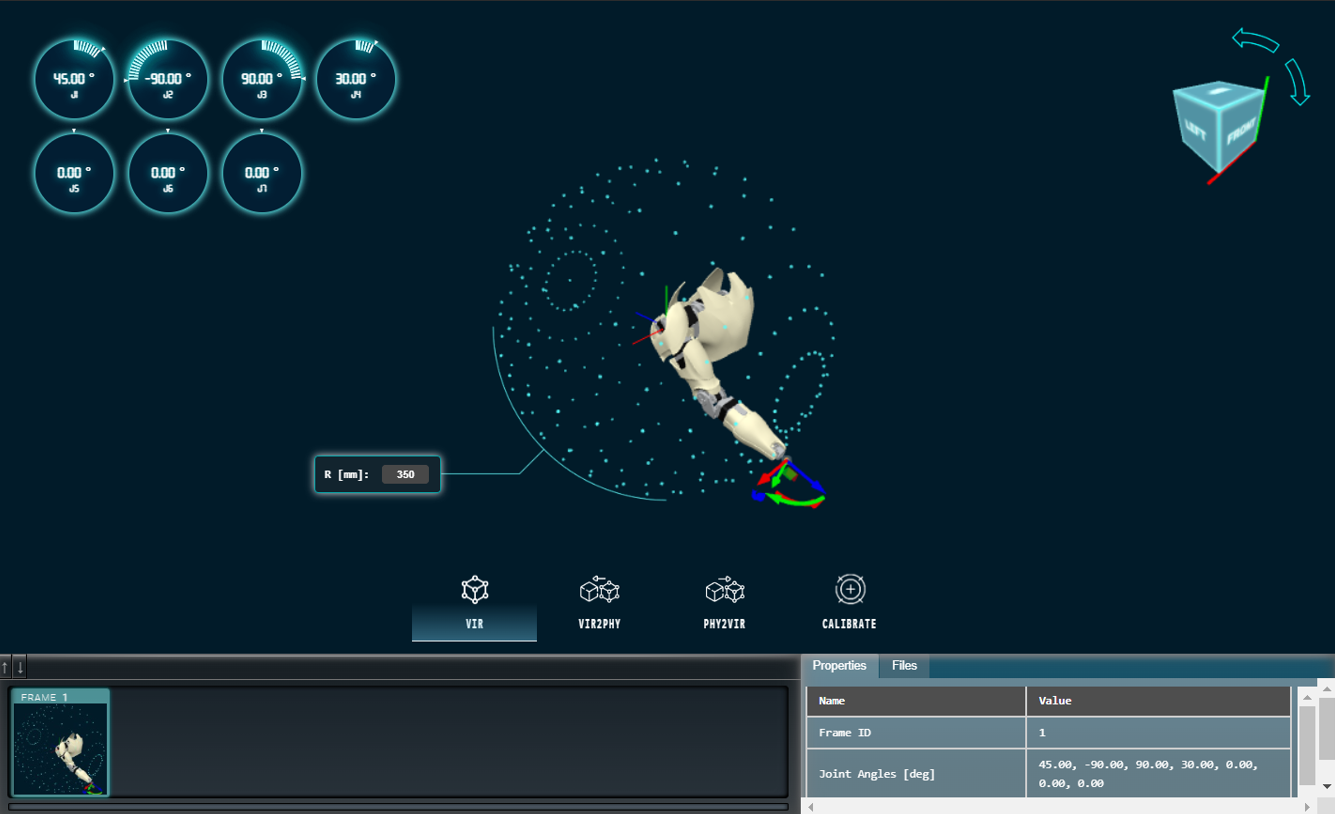
A humanoid robot arm
QT3
机械臂
3/5
机械臂
已发布

项目简介
A humanoid robot arm
标签
项目特点
人形仿生结构,关节布局接近真实手臂
使用 C 语言编写控制代码,运行效率高
开源硬件与软件,所有设计文件与源码可自由获取
结构紧凑,零件数量少,便于复刻与组装
支持基础运动控制,可扩展更多功能
技术规格
| 自由度 | |
|---|---|
| 驱动方式 | |
| 控制芯片 | |
| 通信接口 | |
| 供电电压 | |
| 编程语言 | |
| 开发环境 | |
| 重量 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 3D打印外壳 | 1套 | — | STL文件提供 |
| MG996R 舵机 | 6个 | — | 标准180度 |
| STM32F103C8T6 核心板 | 1块 | — | 蓝色板 |
| 7.4V 锂电池 | 1块 | — | 或5V电源适配器 |
| 杜邦线 | 若干 | — | 公对母 |
| M3螺丝螺母 | 1套 | — | 约20套 |
3D 模型
能力画像
**记忆与知识检索**:2/5 — 项目文档较简练,需自行查阅舵机与STM32资料
**动手与操作**:4/5 — 需要3D打印、焊接、组装等手工技能
**编程与算法**:3/5 — 使用C语言编写控制逻辑,涉及PWM与串口通信
**设计与建模**:2/5 — 结构件已提供STL,无需自行建模
**实验与调试**:3/5 — 需要调试舵机角度与运动轨迹
**协作与分享**:3/5 — 开源社区可交流,但项目规模较小
**学习与研究**:4/5 — 适合学习机器人运动学与嵌入式控制
**系统集成**:3/5 — 需将硬件、固件、电源整合为完整系统
项目图库


所需技能
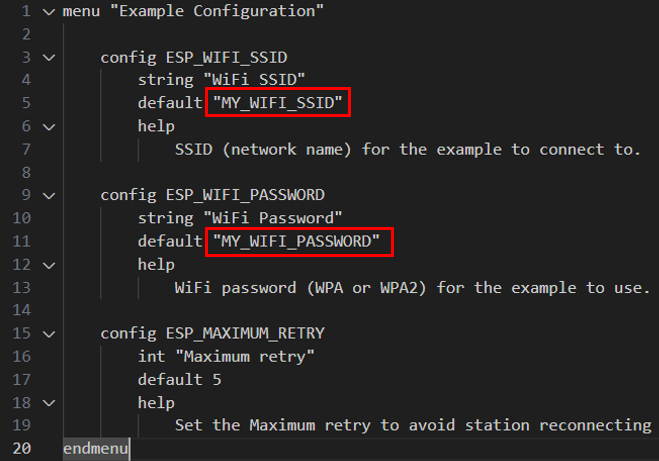
基础 C 语言编程
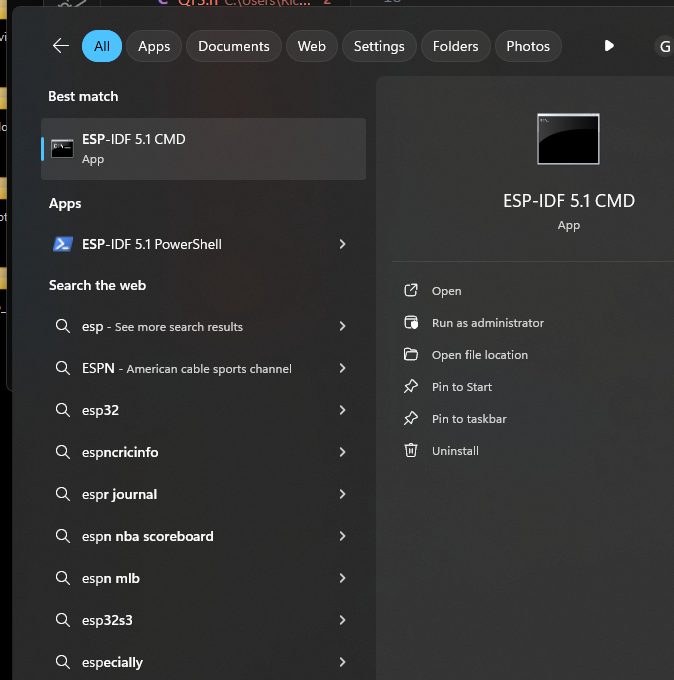
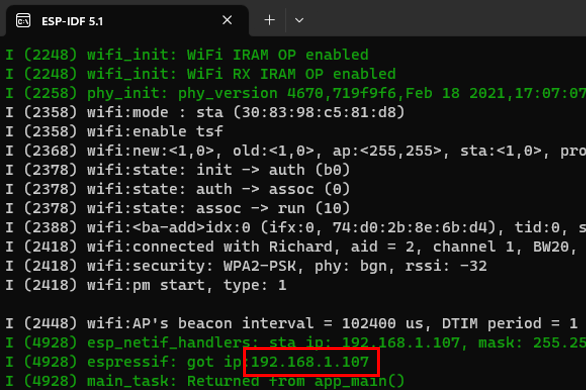
嵌入式开发(STM32 平台)
3D 打印操作与后处理
电子焊接与电路连接
舵机控制与调试
机械组装与紧固
适用场景
机器人入门教学与课程项目
创客空间与实验室的复刻展示
人形机器人运动控制研究
小型抓取与搬运演示
开源硬件爱好者二次开发