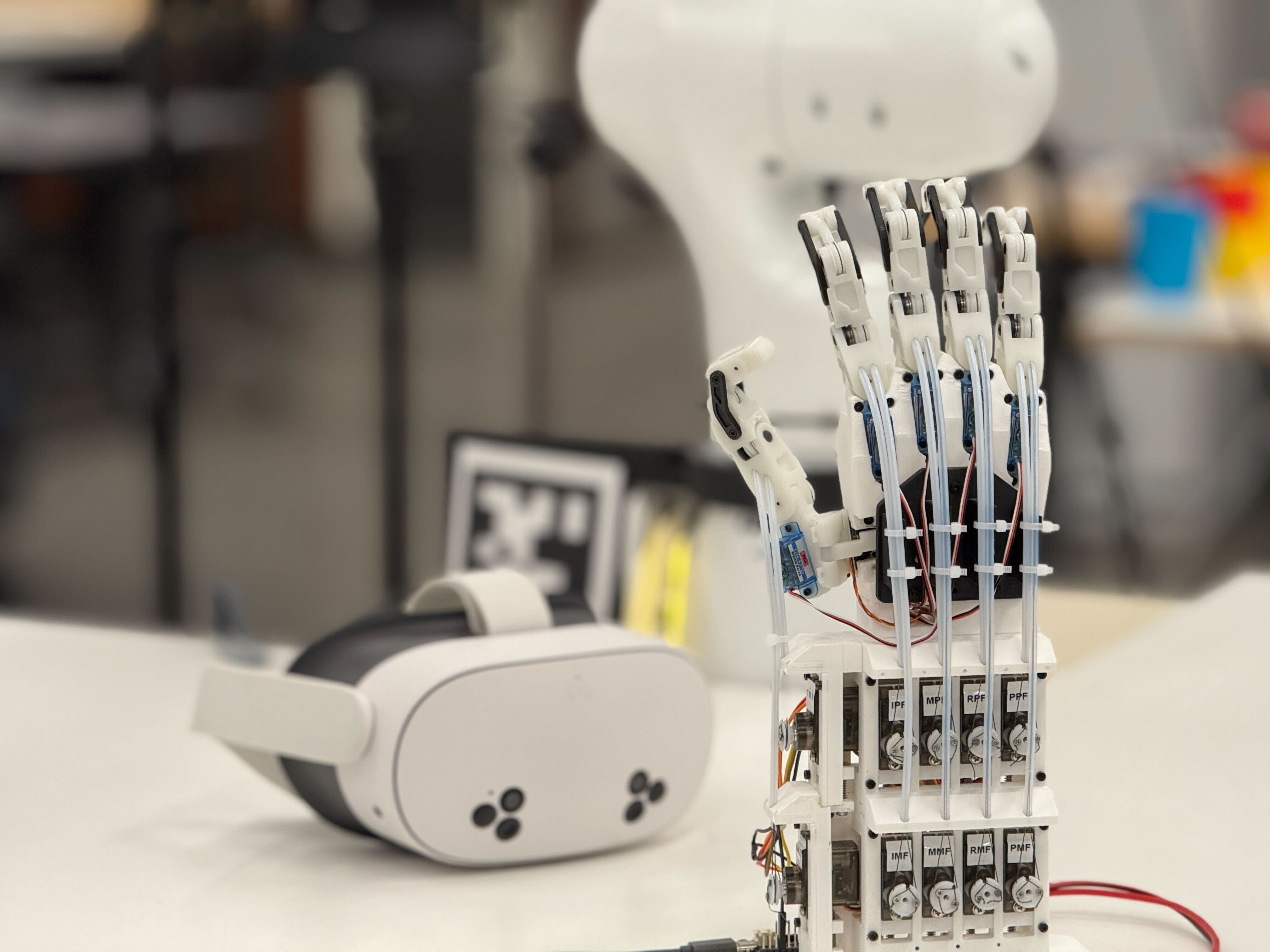
Open source release of biomimetic dexterous robotic hand, BiDexHand
BiDexHand
假手/灵巧手
3/5
假手/灵巧手
已发布
项目简介
Open source release of biomimetic dexterous robotic hand, BiDexHand
标签
项目特点
**模块化5指设计**:每个手指独立驱动,支持灵活抓取和精细操作
**欠驱动连杆机构**:通过连杆传动实现自适应抓取,结构简单可靠
**触觉传感器接口**:预留传感器安装位,可集成触觉反馈功能
**全3D打印制造**:所有结构件均可通过FDM打印机完成,成本可控
**开源社区支持**:提供完整图纸、固件和装配指南,便于二次开发
**仿生学外观**:外形接近人手比例,适用于假肢和机器人交互场景
技术规格
| 手指数量 | |
|---|---|
| 驱动方式 | |
| 自由度 | |
| 材料 | |
| 控制器 | |
| 传感器接口 | |
| 供电电压 | |
| 整机重量 | |
| 抓取力 | |
| 开源协议 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 手指连杆(3D打印) | 5套 | — | PLA材质 |
| 手掌基座(3D打印) | 1个 | — | PETG推荐 |
| 拇指座(3D打印) | 1个 | — | 含关节轴 |
| 舵机(MG996R) | 5个 | — | 每指一个 |
| Arduino Mega | 1块 | — | 主控板 |
| 触觉传感器(FSR) | 5个 | — | 可选 |
| 轴承(3x8mm) | 20个 | — | 关节用 |
| 螺丝M2x8 | 30颗 | — | 固定用 |
| 弹簧(0.5mm线径) | 5根 | — | 复位用 |
| 杜邦线 | 1包 | — | 连接线 |
3D 模型
能力画像
**记忆与知识检索**:2/5 — 项目文档清晰,但需要自行查阅机械原理和舵机控制知识
**动手与操作**:4/5 — 需要精细的3D打印后处理和机械装配,对动手能力要求较高
**编程与算法**:3/5 — 需要编写或修改Arduino固件,涉及舵机控制和传感器读取
**设计与建模**:3/5 — 提供完整STL文件,但若需修改结构需掌握CAD软件
**实验与调试**:4/5 — 机械调试和传感器校准需要反复测试,故障排查较复杂
**协作与分享**:3/5 — 开源社区活跃,可通过GitHub提交问题和改进
**学习与研究**:4/5 — 涉及机器人学、仿生学和传感器技术,适合深入学习
**系统集成**:3/5 — 需要将机械、电子和软件整合,但模块化设计降低了难度
项目图库




所需技能
3D打印操作与后处理(打磨、去支撑)
基础电子知识(舵机接线、Arduino编程)
机械装配能力(螺丝紧固、连杆调整)
固件烧录与调试(Arduino IDE使用)
基础传感器应用(FSR触觉传感器)
故障排查与修复(机械卡顿、舵机抖动)
适用场景
机器人灵巧手研究与教学实验
低成本假肢原型开发与测试
仿生机器人竞赛与创客项目
触觉反馈与人机交互研究
高校机器人课程实践教学
个人DIY机械手制作与改装