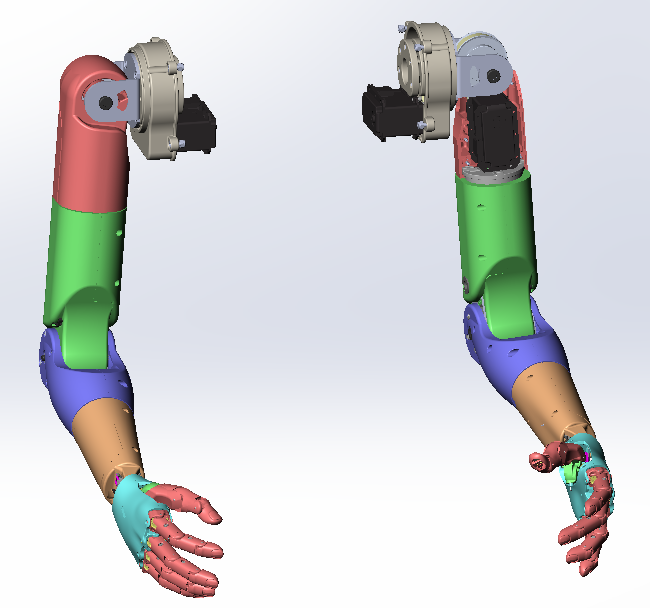
Anthropomorphic Robot Hand and Arm CAD Model
Anthropomorphic-Robot-Hand
假手/灵巧手
3/5
假手/灵巧手
已发布

项目简介
Anthropomorphic Robot Hand and Arm CAD Model
标签
项目特点
高保真仿生设计,模拟人类手部骨骼与关节结构
包含四根手指和一根对掌拇指,共五根手指
提供 STEP、STL、SOLIDWORKS 三种格式的 CAD 文件
开源许可,可自由用于研究、教育和非商业项目
来自 Hanson Robotics,具备成熟的类人机器人设计经验
适合 3D 打印制造,降低原型制作门槛
技术规格
| 手指数量 | |
|---|---|
| 文件格式 | |
| 设计来源 | |
| 许可证 | |
| 适用制造方式 | |
| 项目星数 | |
| 标签 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 食指 | 1 | — | 含多关节结构 |
| 中指 | 1 | — | 含多关节结构 |
| 无名指 | 1 | — | 含多关节结构 |
| 小指 | 1 | — | 含多关节结构 |
| 对掌拇指 | 1 | — | 可对掌运动 |
| 手掌基座 | 1 | — | 连接手指与手臂 |
| 前臂 | 1 | — | 含腕部结构 |
| 关节销轴 | 若干 | — | 用于手指关节装配 |
3D 模型
能力画像
**记忆与知识检索**:2/5 — 项目不涉及知识库或数据检索功能,但 README 提供了基本文档。
**动手与操作**:4/5 — 需要 3D 打印、零件装配和机械调试,动手要求较高。
**编程与算法**:1/5 — 项目本身不包含控制代码或算法,仅提供机械 CAD 模型。
**设计与建模**:5/5 — 核心能力在于高保真仿生 CAD 设计,包含复杂曲面和关节结构。
**实验与调试**:3/5 — 打印和装配后需要测试手指运动范围及关节灵活性。
**协作与分享**:3/5 — 开源项目,可通过 GitHub 提交 issue 或 fork 进行协作。
**学习与研究**:4/5 — 适合研究仿生机器人、假肢设计和机械结构学。
**系统集成**:2/5 — 模型本身是机械部分,需自行集成电机、传感器和控制系统。
项目图库


所需技能
3D 打印操作与后处理
基础机械装配能力
CAD 软件(如 SOLIDWORKS)基本使用
机器人学基础知识(关节运动、自由度)
材料选择与零件修整经验
适用场景
仿生机器人手部原型开发
高校机器人课程教学与实验
假肢设计与康复工程研究
创客空间 3D 打印项目
机器人竞赛中的机械手模块
个人 DIY 类人机器人制作