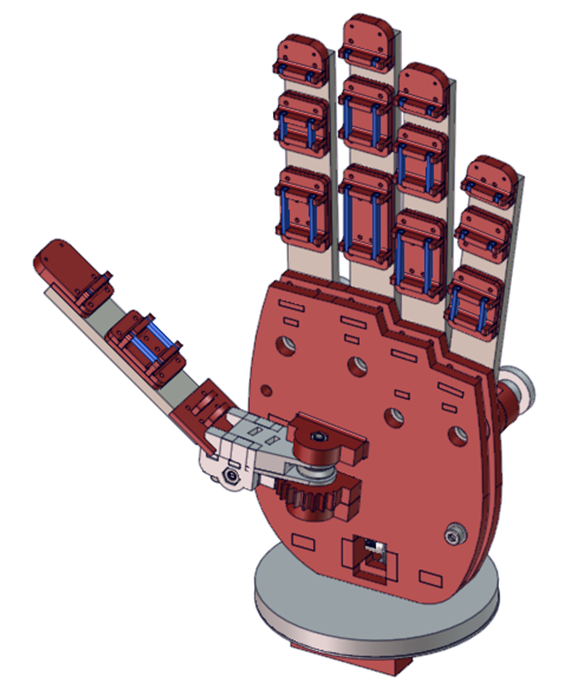
Affordable (< 200$), light-weight (< 300 gr), anthropomorphic prosthetic hands, using a novel selectively-lockable diffe
Prosthetic-Hands
假手/灵巧手
3/5
假手/灵巧手
已发布

项目简介
Affordable (< 200$), light-weight (< 300 gr), anthropomorphic prosthetic hands, using a novel selectively-lockable diffe
标签
项目特点
**超低成本**:整套假手的物料成本控制在200美元以内,远低于市面上的商业假肢。
**轻量化设计**:整只手重量低于300克,减轻了用户佩戴时的负担。
**肌电控制**:支持通过肌肉信号进行控制,实现更自然的抓取动作。
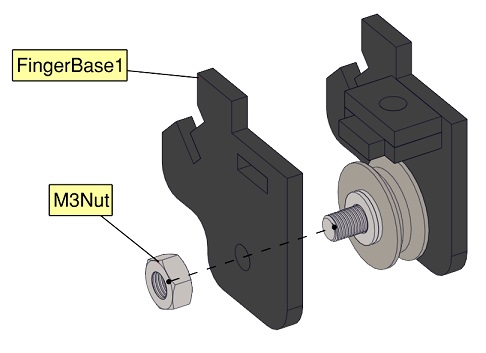
**3D打印制造**:所有结构件均可通过3D打印制作,降低了制造门槛。
**多种手型可选**:提供ADA、BRUNEL、HANDi等多种外形设计,满足不同需求。
**开源许可**:采用CC BY 4.0协议,允许自由使用、修改和分享。
技术规格
| 总成本 | |
|---|---|
| 总重量 | |
| 驱动方式 | |
| 制造工艺 | |
| 自由度 | |
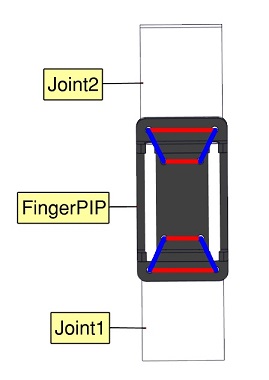
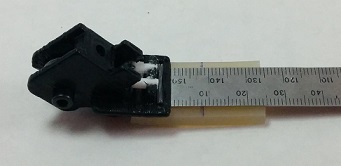
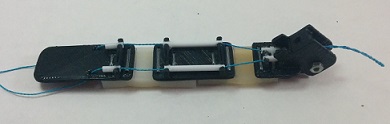
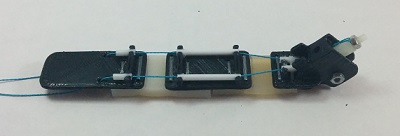
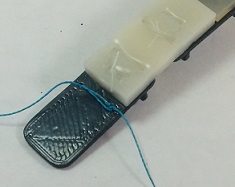
| 锁定机构 | |
| 许可协议 | |
| 手型型号 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 3D打印手指组件 | 5套 | — | PLA或PETG材质 |
| 3D打印手掌 | 1个 | — | 含差动机构 |
| 3D打印腕部连接件 | 1个 | — | 适配不同腕部尺寸 |
| 肌电传感器 | 1个 | — | 用于读取肌肉信号 |
| 微控制器(如Arduino Nano) | 1个 | — | 控制逻辑处理 |
| 舵机 | 5个 | — | 驱动手指运动 |
| 电池 | 1个 | — | 锂电池,7.4V |
| 螺丝与螺母 | 若干 | — | M2/M3规格 |
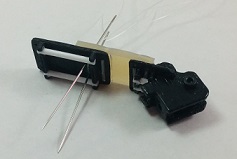
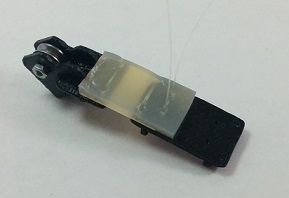
| 弹簧 | 若干 | — | 用于手指回弹 |
| 鱼线或钢丝 | 若干 | — | 用于手指牵引 |
3D 模型
能力画像
**记忆与知识检索**:2/5 — 需要查阅少量文档了解机构原理,但整体信息集中。
**动手与操作**:4/5 — 涉及3D打印、电子焊接、机械组装,动手要求较高。
**编程与算法**:3/5 — 需要编写或修改肌电信号处理与舵机控制代码。
**设计与建模**:3/5 — 可对3D模型进行修改或适配,但基础设计已提供。
**实验与调试**:4/5 — 需要调试肌电传感器灵敏度、舵机行程与手指同步。
**协作与分享**:3/5 — 项目社区活跃,鼓励提交改进与分享改装方案。
**学习与研究**:3/5 — 涉及假肢学、肌电控制、差动机构等交叉知识。
**系统集成**:4/5 — 需要将机械、电子、软件整合为一个可穿戴系统。
项目图库





所需技能
基础3D打印操作与调参
电子电路焊接与连接
Arduino或类似平台编程
机械组装与调试
肌电传感器基本使用
基础CAD模型修改(可选)
适用场景
假肢研究与开发实验室
开源硬件与机器人爱好者制作项目
低成本假肢定制与适配服务
高校工程类课程设计与毕业设计
残疾人辅助技术社区的制作与分享活动