我的超迷你机械臂机器人项目。
Dummy-Robot
机械臂
3/5
机械臂
已发布

项目简介
我的超迷你机械臂机器人项目。
标签
项目特点
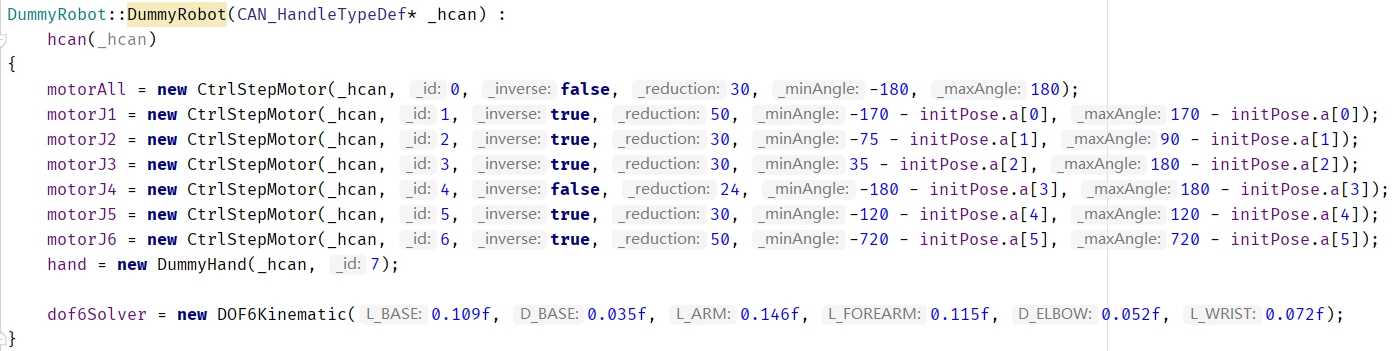
6自由度(6DOF)机械臂结构,采用步进电机+谐波减速器,体积小巧但精度可观
全开源设计:包含3D打印结构件、PCB电路板、STM32固件、上位机软件和示教器源码
支持CAN总线通信,便于扩展多关节协同控制
提供图形化上位机,支持实时控制、轨迹记录与回放
配套示教器(Teach Pendant),可手动拖拽示教编程
模块化设计,关节可独立拆装,方便调试与维护
技术规格
| 自由度 | |
|---|---|
| 驱动方式 | |
| 通信接口 | |
| 主控芯片 | |
| 供电电压 | |
| 最大负载 | |
| 重复定位精度 | |
| 整机重量 | |
| 外形尺寸 | |
| 开源协议 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 3D打印外壳及关节件 | 1套 | — | PLA/PETG打印 |
| 42步进电机 | 6 | — | NEMA17规格 |
| 谐波减速器 | 6 | — | 减速比50:1或100:1 |
| 步进电机驱动板 | 6 | — | TMC2209或类似 |
| STM32控制板 | 1 | — | 自研PCB |
| CAN收发器模块 | 1 | — | SN65HVD230 |
| 12V DC电源适配器 | 1 | — | 3A以上 |
| 示教器(可选) | 1 | — | 含屏幕与按键 |
| 杜邦线/排线 | 若干 | — | 连接各关节 |
3D 模型
能力画像
**记忆与知识检索**:3/5 — 需要查阅电机选型、谐波减速器参数、CAN协议等资料
**动手与操作**:4/5 — 涉及3D打印、焊接、机械组装、布线等大量手工操作
**编程与算法**:4/5 — 需要编写/修改STM32固件、上位机界面、运动学算法
**设计与建模**:3/5 — 结构件已提供3D模型,但修改或适配需要建模能力
**实验与调试**:4/5 — 需要调试电机步进、CAN通信、关节同步、轨迹精度
**协作与分享**:2/5 — 个人项目为主,但可参与社区讨论或提交PR
**学习与研究**:5/5 — 涵盖机器人学、嵌入式、通信协议、控制理论等多领域
**系统集成**:4/5 — 需要将机械、电子、软件、通信整合为完整系统
项目图库


所需技能
基础电子焊接与电路调试
3D打印操作与模型切片
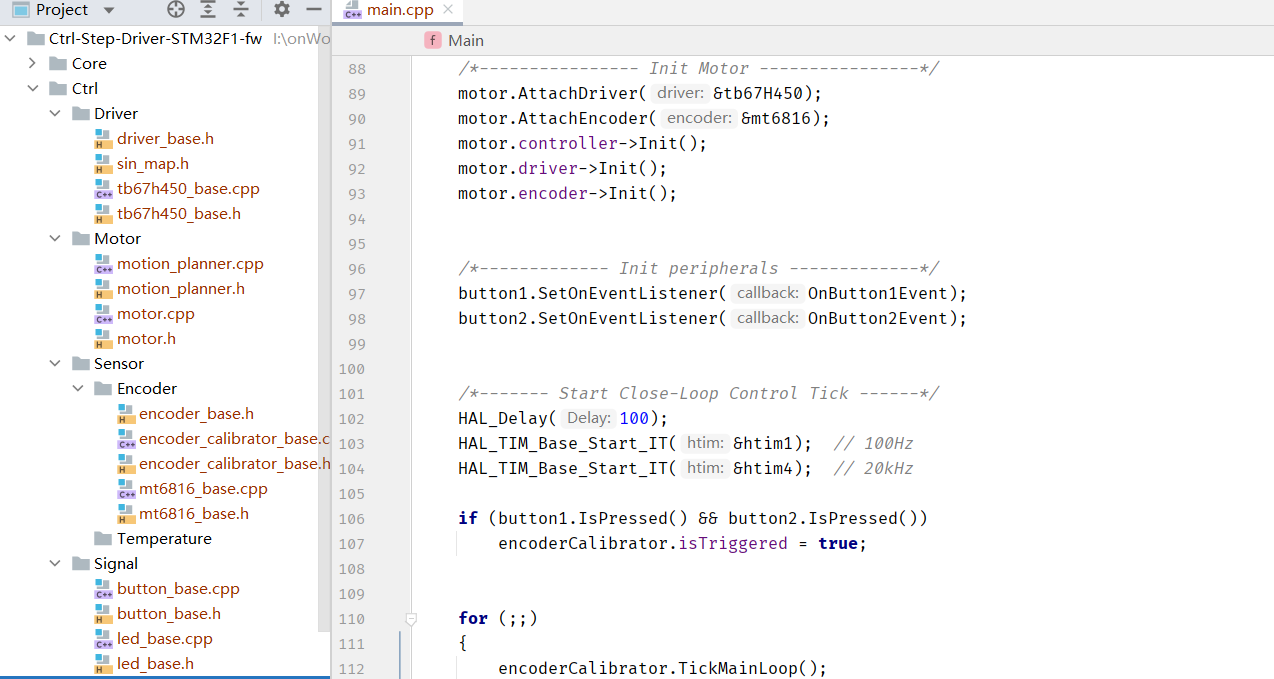
STM32嵌入式开发(C语言)
步进电机驱动与控制原理
CAN总线通信协议基础
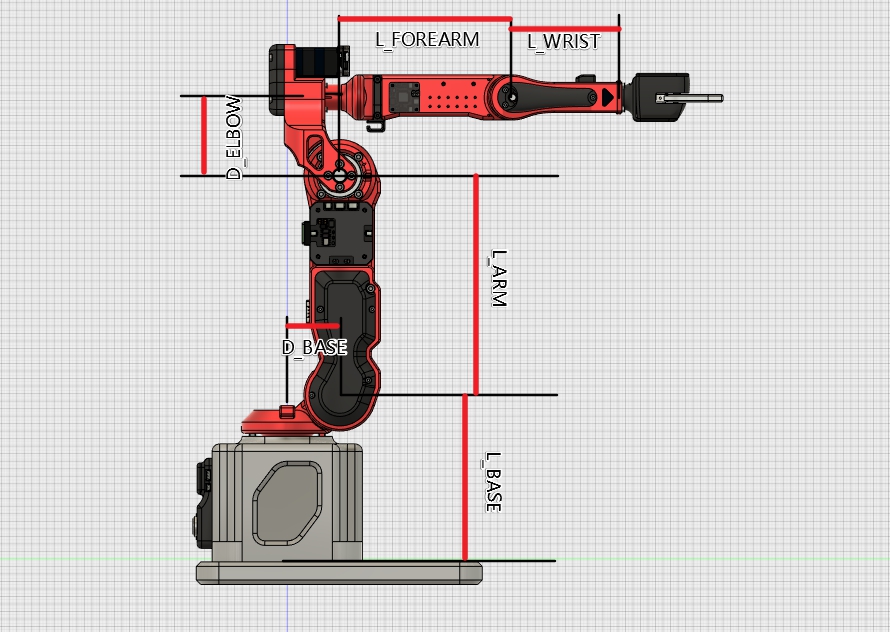
机器人运动学基础(正逆解)
Python或C#上位机开发
机械装配与公差调整
适用场景
机器人技术学习与教学演示
桌面级轻量抓取与搬运实验
开源硬件创客项目展示
高校机器人课程实验平台
小型自动化原型验证
个人DIY机械臂兴趣制作