RoArm-M2 桌面机械臂套件
roarm_m2
ESP32, 机器人
2/5
已发布

项目简介
基于ESP32,3+1自由度,高扭矩串行总线舵机,RoArm-M2桌面机械臂套件。
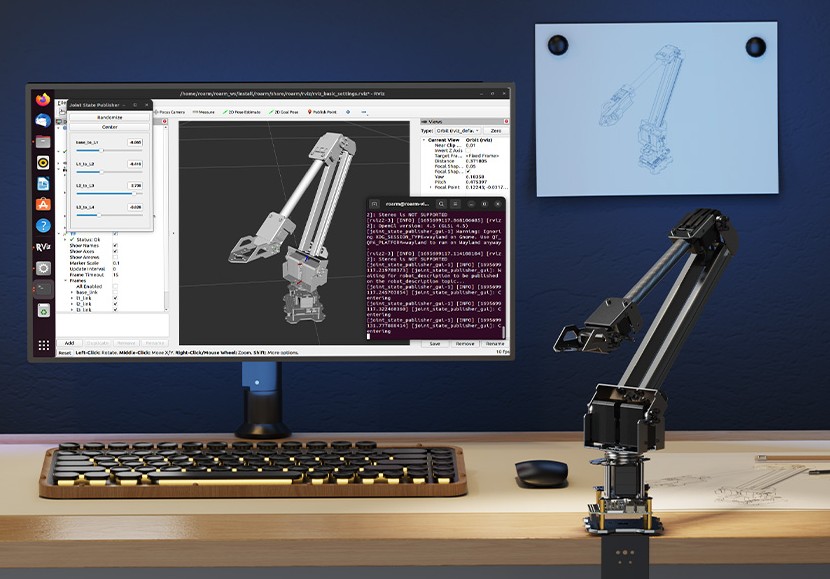
RoArm-M2 是一款由 Waveshare 推出的四自由度智能机械臂,专为创新应用场景设计。它采用轻量化结构,整机重量不到 900 克,却能在 0.5 米臂展下实现 0.5 公斤的有效负载,并凭借 360° 全向底座与三个柔性关节的配合,构建出直径达 1 米的球形工作空间,灵活性极强。项目核心解决了传统机械臂笨重、操作复杂、扩展性差的问题,尤其适合需要轻便安装于移动平台、兼顾精准控制与二次开发的场景,如教育科研、桌面级自动化、人机交互实验等。
标签
项目特点
**可扩展性**:提供多种可扩展组件,支持多功能末端执行器(EoAT)定制,满足不同创新应用需求。
**全向工作空间**:底座 360° 旋转,结合柔性关节运动,形成直径达 1 米的全向工作空间。
**易于使用**:提供跨平台 Web 应用和坐标控制模式,降低操作难度,方便用户快速上手。
**开源代码**:RoArm-M2-S 的控制代码和通信接口文档完全开源,便于用户进行二次开发。
**轻量化结构**:采用碳纤维和 5052 铝合金,机身重量小于 850g,易于安装到各种移动平台上。
**关节直驱设计**:使用 12 位高精度磁编码器获取关节角度,重复定位精度达 0.088°,提升结构可靠性。
**双驱动技术**:创新的双驱动技术增加了机械臂肩关节的扭矩,提升了整体负载能力。
**强大主控**:采用 ESP32 主控 MCU,支持多种控制接口和无线通信协议。
**多平台支持**:兼容 ROS2 和多种上位机,支持多种无线和有线通信方式,满足不同开发和控制需求。
**丰富教程**:提供丰富的图文和视频教程,覆盖各种功能,帮助用户快速上手并实现创新应用。
技术规格
| 型号 | RoArm-M2-S / RoArm-M2-Pro |
|---|---|
| 自由度 | 4 (3+1 DOF) |
| 主控芯片 | ESP32 |
| 舵机类型 | 高扭矩串行总线舵机 |
| 有效负载 | 0.5kg @ 0.5m |
| 总重量 | < 900g |
| 工作空间直径 | 1 米 |
| 重复定位精度 | 0.088° |
| 编码器 | 12 位高精度磁编码器 |
| 机身材料 | 碳纤维 + 5052 铝合金 |
| 通信方式 | 无线 (WiFi/蓝牙) / 有线 (串口) |
| 软件支持 | Web App, ROS2, MoveIt2, Arduino |
| 末端执行器 | 可定制 (EoAT) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 碳纤维臂杆 | 1套 | — | 轻量化设计 |
| 5052 铝合金关节 | 1套 | — | 高刚性 |
| ESP32 主控板 | 1 | — | 核心控制单元 |
| 串行总线舵机 | 4 | — | 高扭矩,含肩关节双驱动 |
| 12位磁编码器 | 4 | — | 关节角度反馈 |
| 扩展板 | 1 | — | 支持EoAT定制 |
| 底座 | 1 | — | 360°旋转 |
| 末端执行器 | 1 | — | 可更换 |
| 电源适配器 | 1 | — | 供电 |
| 连接线缆 | 1套 | — | 通信和电源线 |
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 2/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
🔵 数理与计算: 3/5
🔵 动手与操作: 4/5
⚪ 狂热与坚持: 3/5
🔵 创造与创新: 4/5
项目图库



视频
所需技能
🔧 **动手能力**:需要具备一定的机械组装能力,能够使用螺丝刀等工具完成机械臂的组装和调试。如果涉及自定义末端执行器,还需要3D打印和简单加工技能。
💻 **编程能力**:需要具备基本的编程知识,特别是 Arduino (C++) 或 Python (ROS2)。能够理解 ESP32 固件烧录、Web 应用操作以及 ROS2 工作空间的配置。
⚡ **电子电路**:需要了解基本的电路连接知识,能够连接舵机、传感器和扩展板。如果进行二次开发,可能需要焊接和调试简单电路。
适用场景
**教育科研**:作为机器人学、运动控制、ROS2 等课程的教学平台,适合大学实验室和创客空间。
**轻量级自动化**:用于桌面级的拾取、放置、分拣等轻量级自动化任务。
**创新应用开发**:利用其可扩展性和开源特性,开发如视觉抓取、人机协作、移动平台集成等创新应用。
**机器人爱好者**:适合对机械臂控制、嵌入式开发和 ROS 感兴趣的爱好者进行学习和实践。