斯坦福机器狗项目
StanfordDoggoProject
四足/人形机器人、智能家居
3/5
🧩 软硬件结合
已发布

项目简介
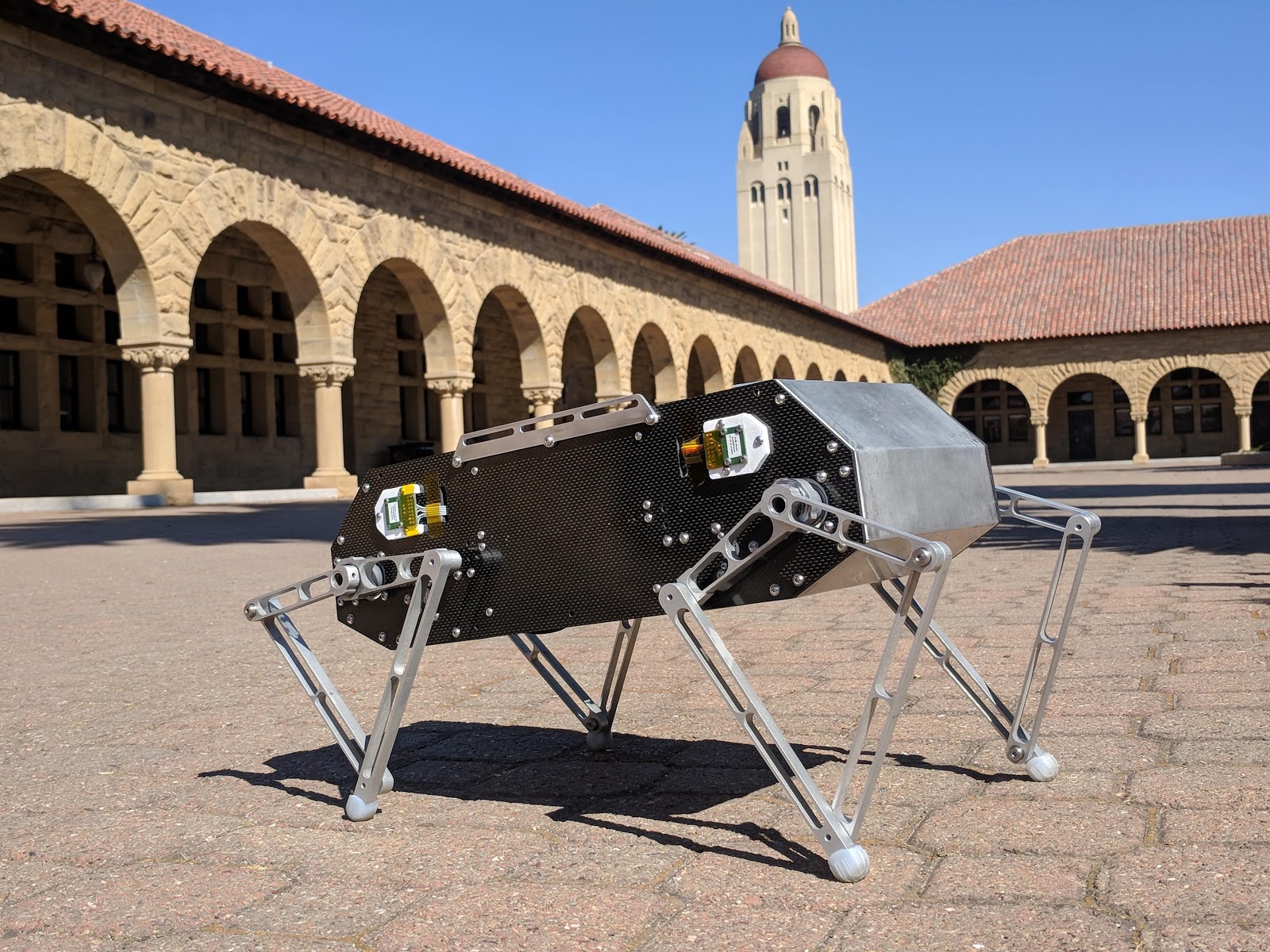
Stanford Doggo开源四足机器人,可跳跃、翻转、小跑!
Stanford Doggo Project 是斯坦福大学学生机器人团队开发的一款开源四足机器人,旨在为足式机器人研究提供一个高度灵活且易于获取的平台。该机器人在垂直跳跃敏捷性方面保持着世界纪录,其跳跃高度是现有同类四足机器人的两倍,展现了卓越的动态运动能力。
标签
项目特点
**完全开源**:机械、电子、软件全部公开,MIT 许可证,可自由修改和商用。
**准直驱(Quasi-Direct Drive)电机**:高扭矩密度、低减速比,实现高动态运动和力控。
**多种运动模式**:支持跳跃、前空翻、后空翻、小跑、行走等动作。
**低成本高性价比**:整机物料成本约 3000 美元,远低于同类商业机器人。
**模块化设计**:腿部、机身、电路板均可独立拆装,便于维修和升级。
**完善的文档与社区**:GitHub 上有详细组装指南、BOM 表和调试教程。
技术规格
| 整机重量 | |
|---|---|
| 尺寸(长×宽×高) | |
| 自由度 | |
| 电机类型 | |
| 减速比 | |
| 最大跳跃高度 | |
| 最大前向速度 | |
| 电池 | |
| 主控制器 | |
| 通信接口 | |
| 机身材质 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| T-Motor U8 无刷电机 | 12 | — | 准直驱电机 |
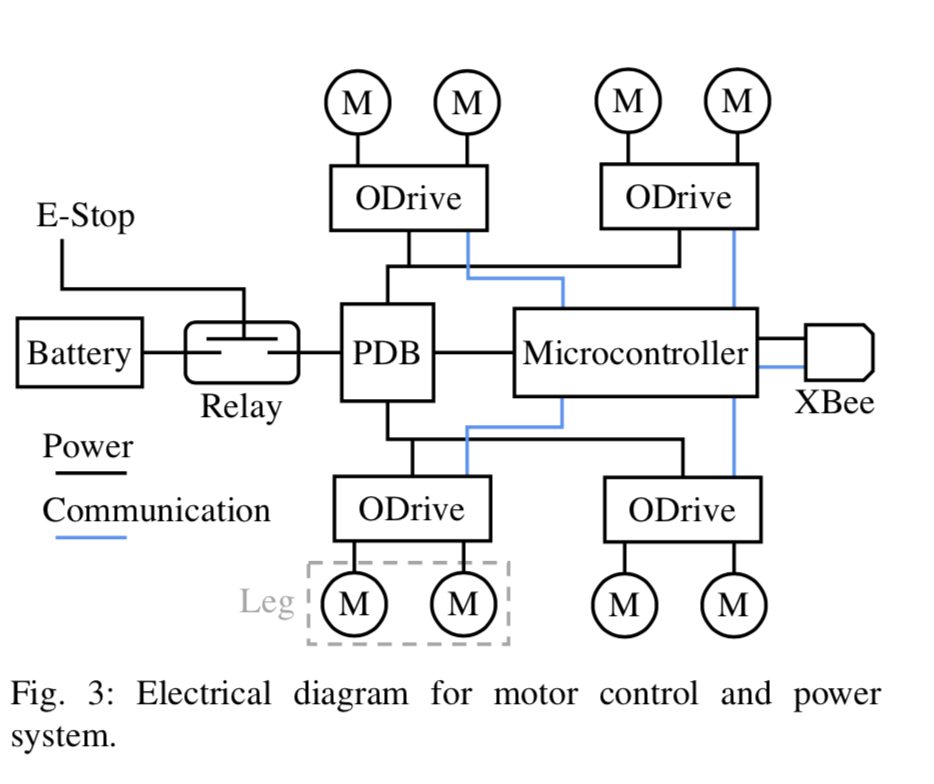
| ODrive 3.6 电机驱动器 | 6 | — | 每个驱动器控制两个电机 |
| Teensy 4.0 开发板 | 1 | — | 主控 |
| 6S LiPo 5000 mAh | 1 | — | 22.2V |
| 3D 打印 PLA 腿部组件 | 12 | — | 需自行打印 |
| 碳纤维管(机身骨架) | 4 | — | 直径 12 mm |
| GT2 同步带 + 带轮 | 12 套 | — | 减速比 6:1 |
| CAN 收发器模块 | 1 | — | 用于电机通信 |
| 电压调节模块 | 1 | — | 5V/3.3V 输出 |
| M3 螺丝、螺母、垫片 | 若干 | — | 标准件 |
能力画像
**记忆与知识检索**:3/5 — 需要查阅大量文档和论坛帖子,但资料集中且清晰。
**动手与操作**:5/5 — 涉及 3D 打印、焊接、机械组装、布线,动手强度高。
**编程与算法**:4/5 — 需要理解 C++ 控制代码、CAN 通信协议和运动学算法。
**设计与建模**:3/5 — 可直接使用现成 CAD 文件,但修改腿部或机身需要建模能力。
**实验与调试**:5/5 — 电机调参、姿态调试、运动测试需要反复实验。
**协作与分享**:2/5 — 单人可完成,但社区贡献和问题讨论能大幅提高效率。
**学习与研究**:4/5 — 涉及四足机器人运动学、力控、准直驱电机等前沿知识。
**系统集成**:5/5 — 需要将机械、电子、软件、控制算法整合为一个稳定系统。
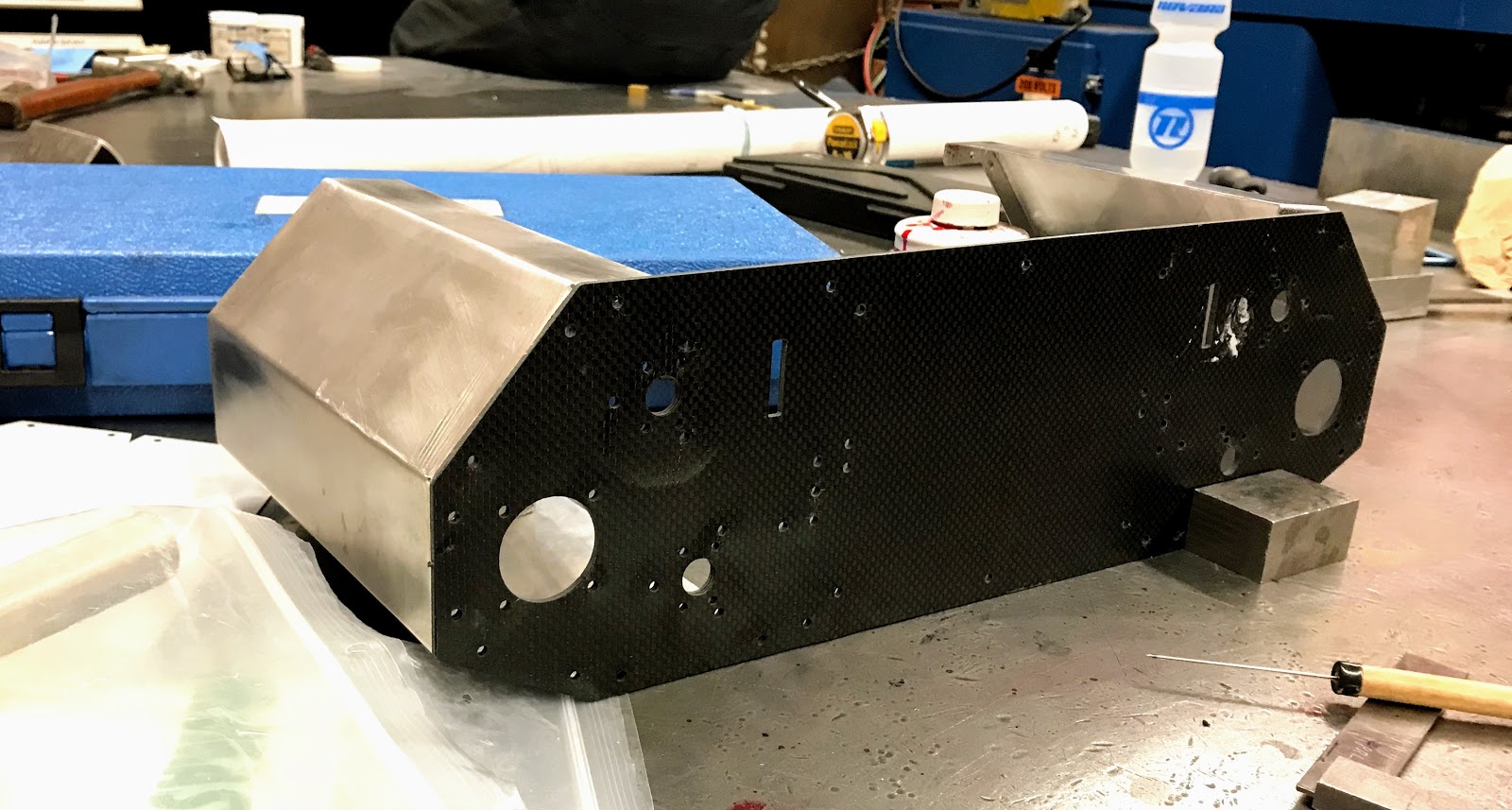
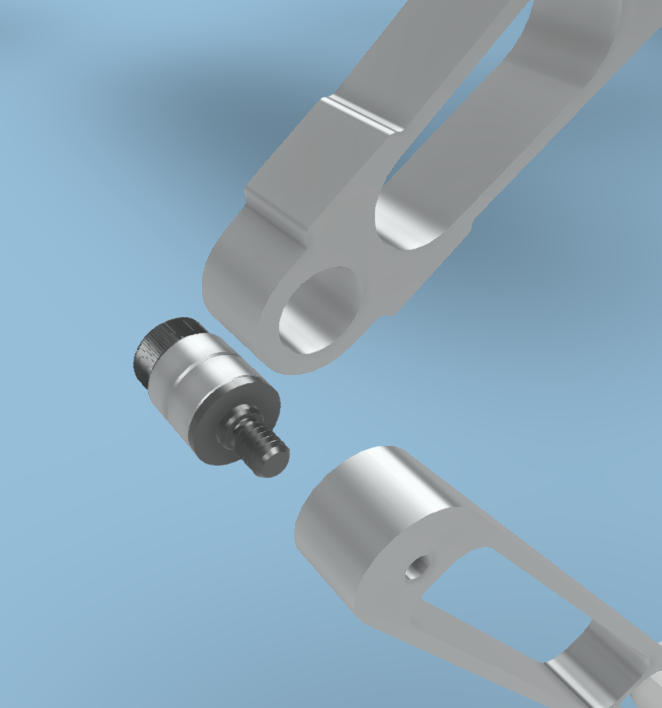
项目图库



所需技能
3D 打印操作与后处理
基本电子焊接与电路调试
C/C++ 编程基础(Arduino/Teensy 环境)
机械装配与公差理解
无刷电机与驱动器调试经验
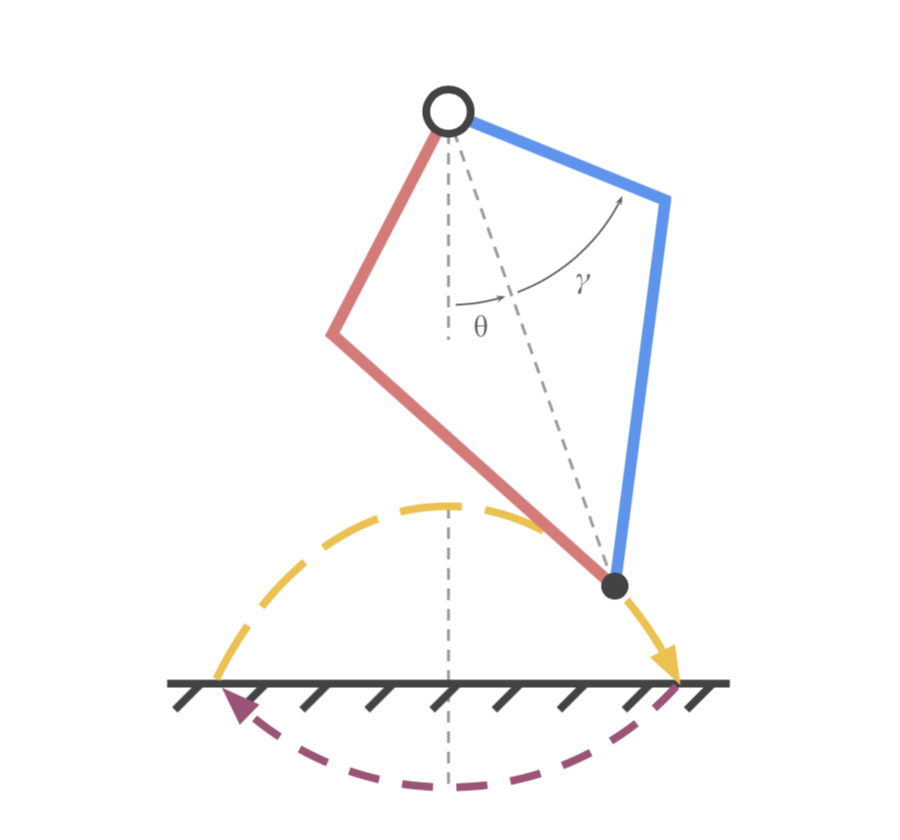
基础运动学与 PID 控制概念
使用 GitHub 进行版本管理
适用场景
高校机器人课程设计与毕业项目
个人创客的四足机器人入门实践
四足运动控制算法研究与验证平台
机器人竞赛(如 RoboMaster、ICRA 四足挑战赛)
开源硬件社区展示与教学演示
低成本四足机器人原型开发与迭代