Lenna 移动机器人 ONE
Lenna-Mobile-Robot-ONE
ROS
4/5
🧩 软硬件结合
已发布
项目简介
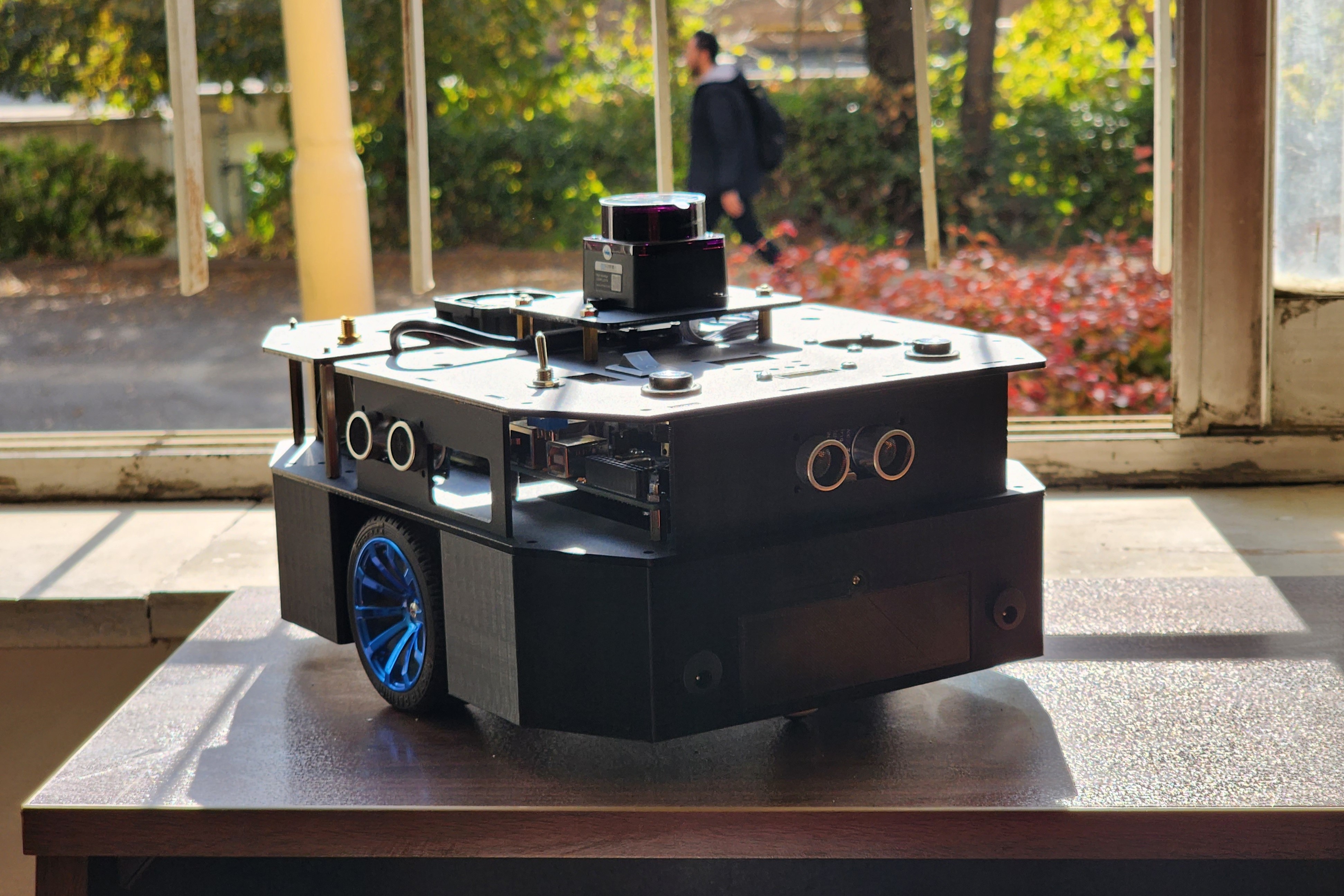
分布式控制架构的自主移动机器人,使用ROS进行机器人控制。
一款采用分布式控制架构的自主移动机器人。它在机器人控制层面使用ROS,并使用实时嵌入式板进行硬件控制。此仓库是该开源平台(尤其是其软件栈)的完整文档。
标签
项目特点
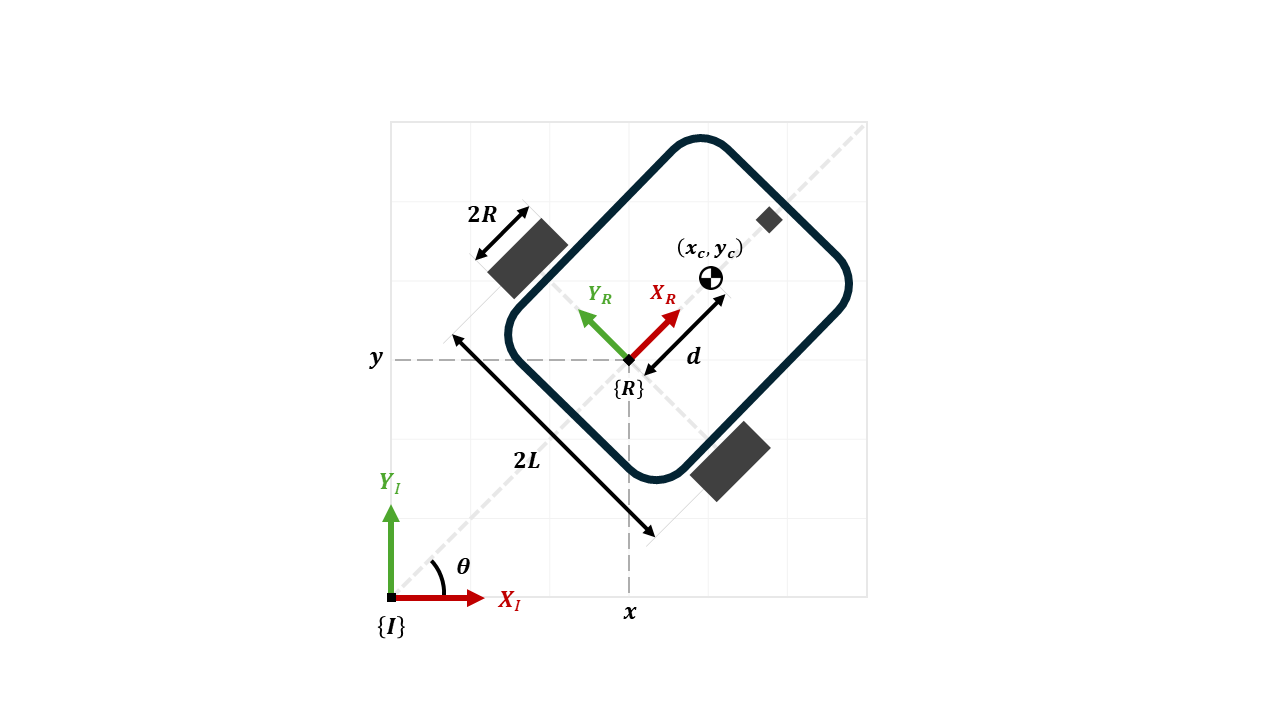
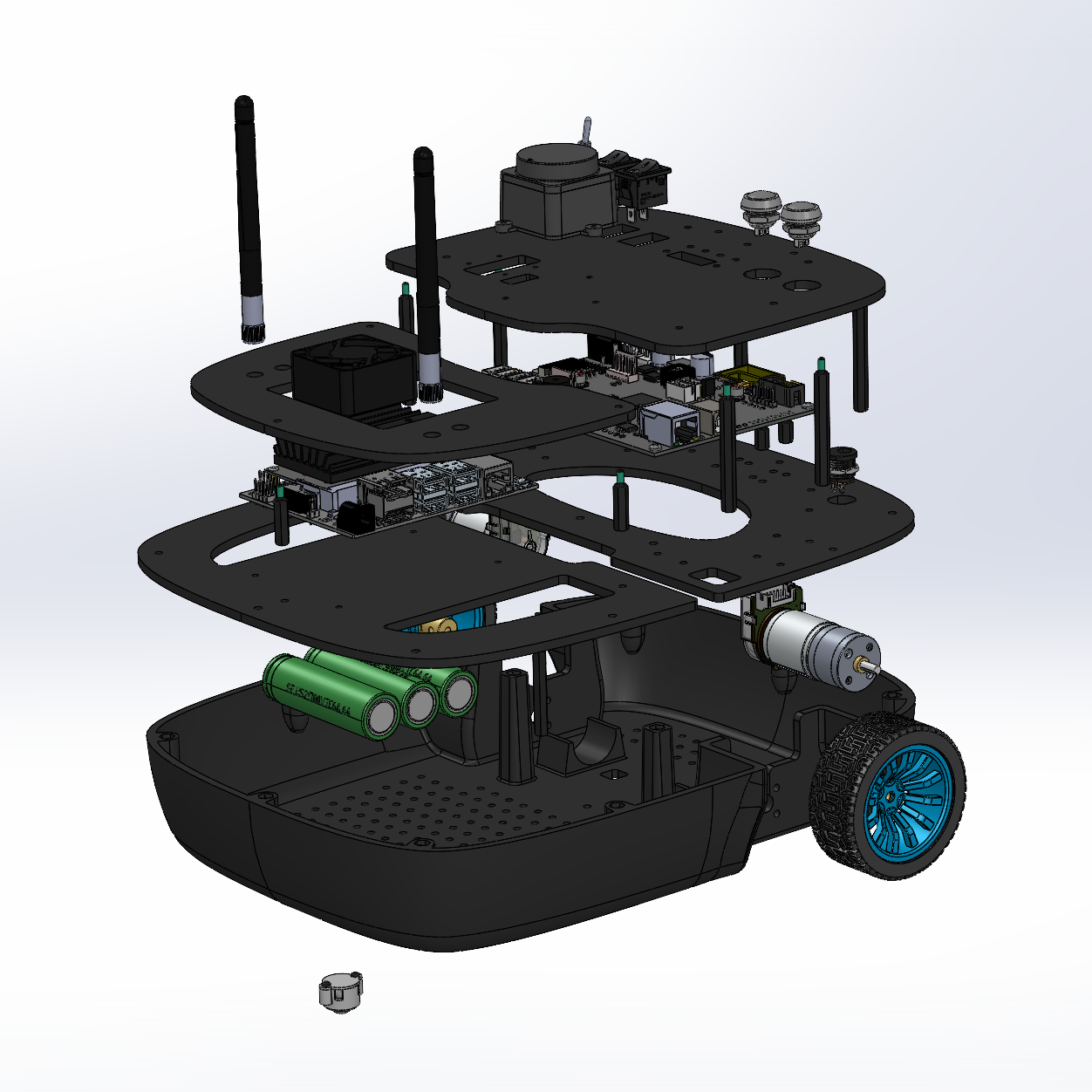
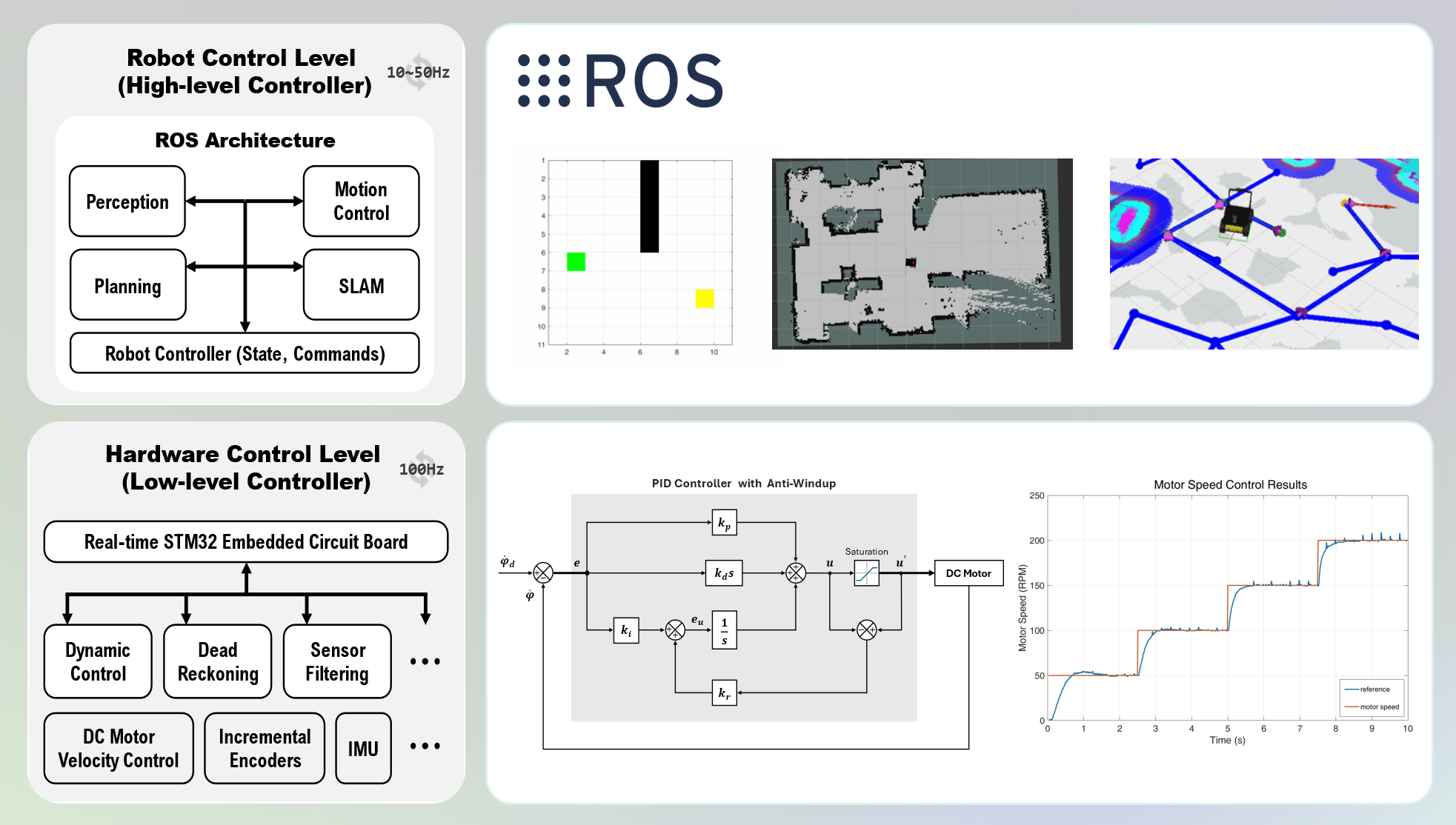
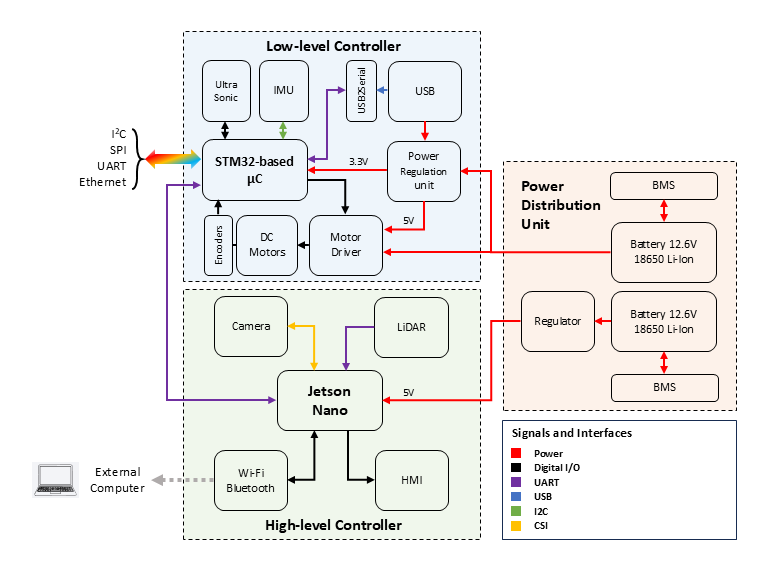
**分布式控制架构**:将机器人控制分为硬件控制层(LCB)和机器人控制层(HCB),解耦了底层动力学与高层决策,使运动控制聚焦于速度层的运动学。
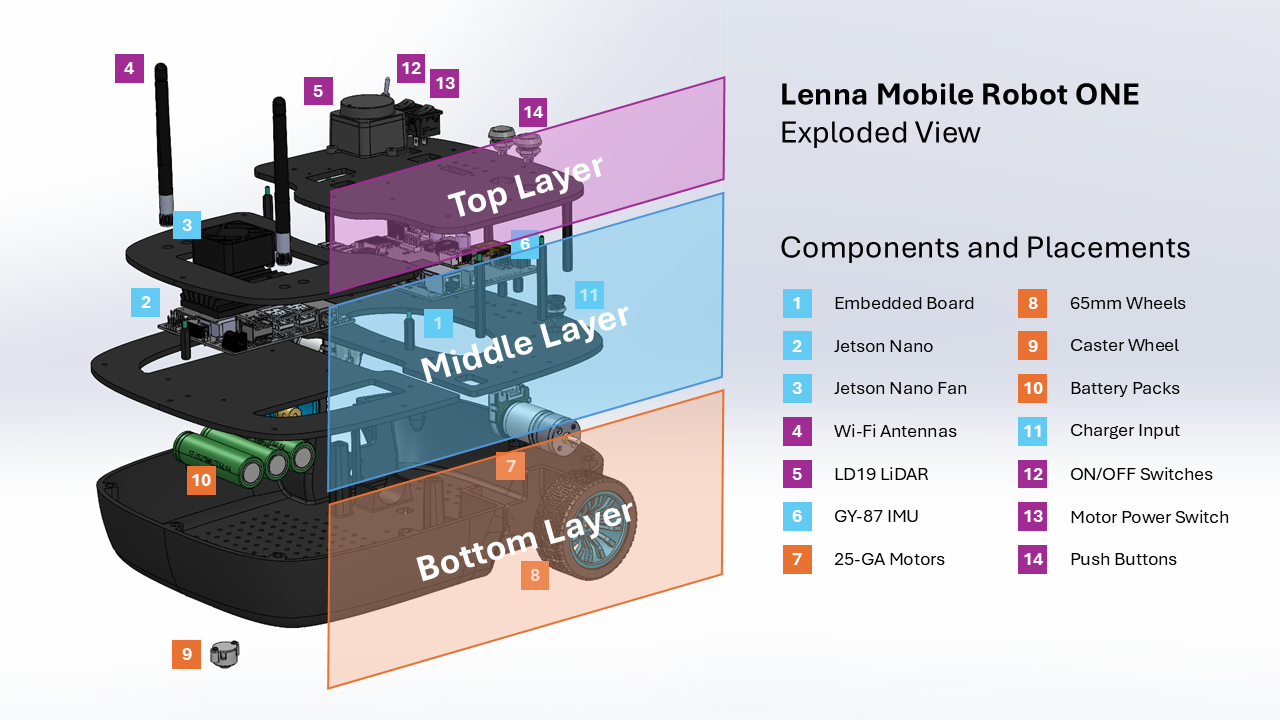
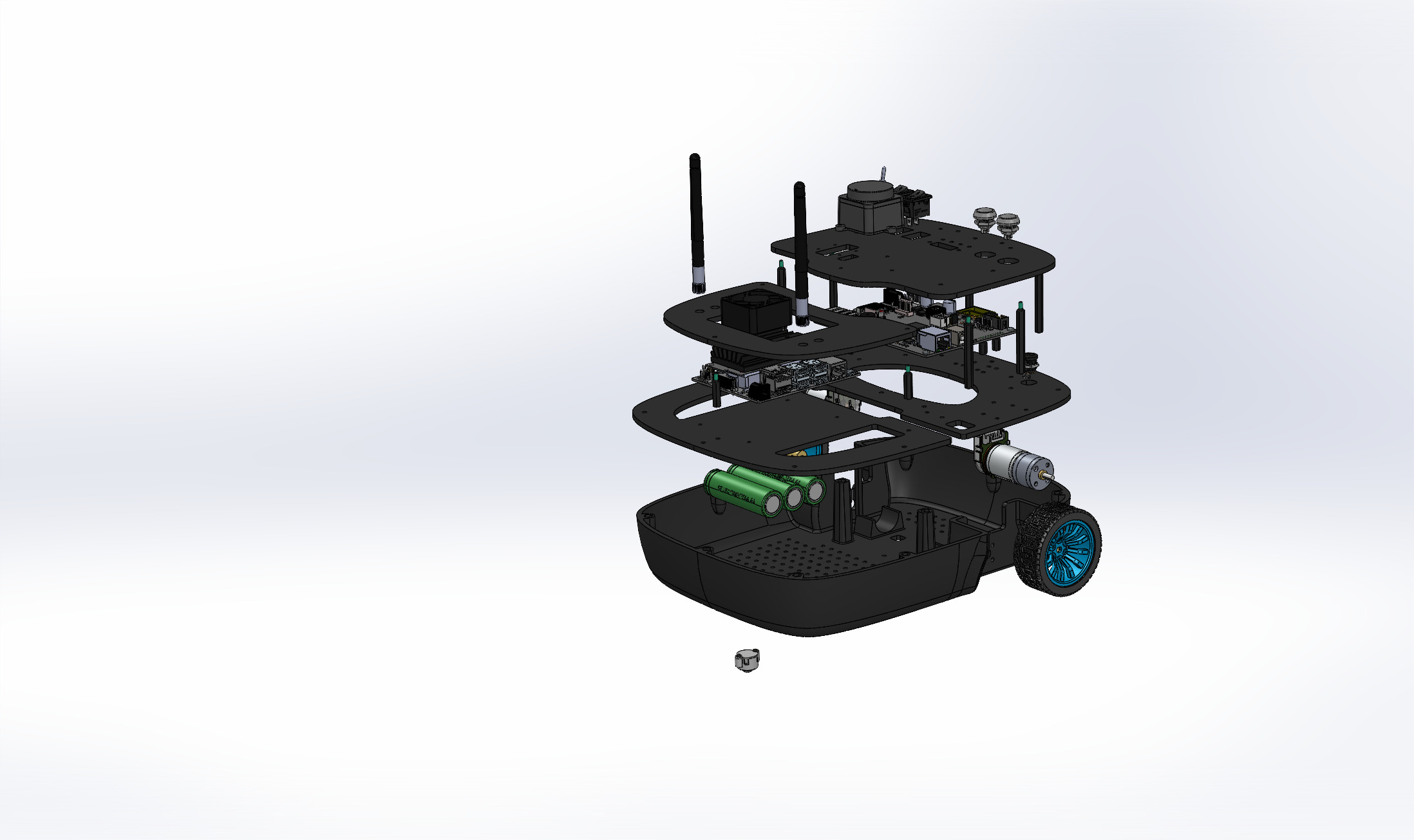
**模块化机械设计**:采用三层堆叠结构,每层放置不同组件,便于快速原型制作、替换或修改子系统,不影响核心功能。
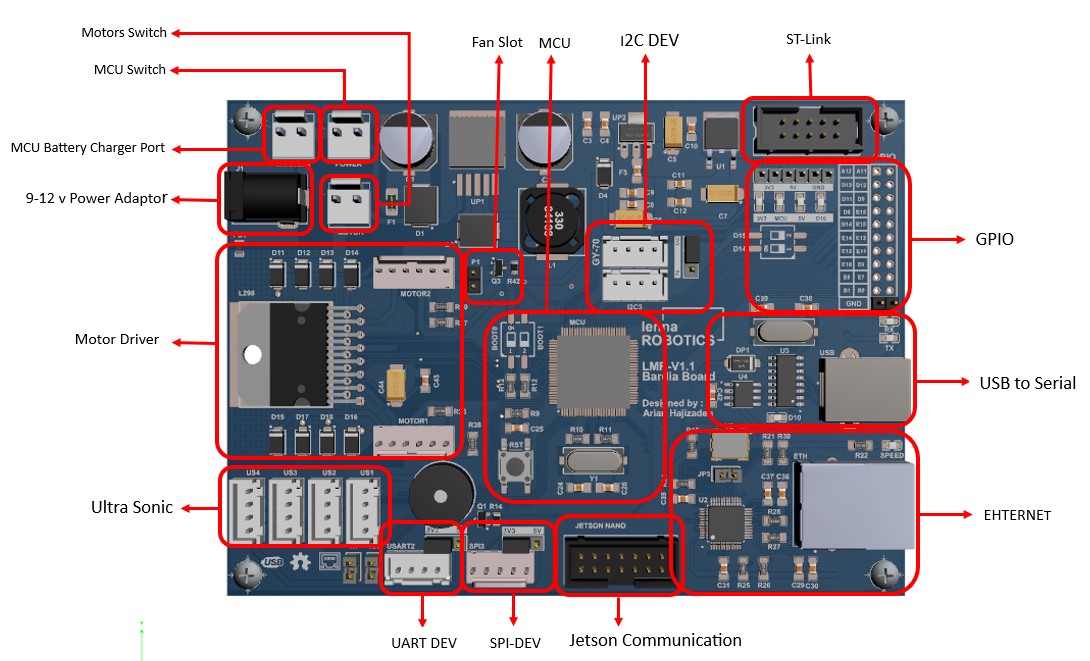
**自研低层控制器**:团队设计了名为“Bardia Board”的定制PCB,集成了传感器接口和电机驱动,完整设计开源。
**完整的ROS集成**:提供完整的ROS包,支持`teleohttps://raw.githubusercontent.com/Lenna-Robotics-Research-Lab/Lenna-Mobile-Robot-ONE/main/hardware/mechanics/slam_toolbox`/`hector_slam`建图以及基于https://raw.githubusercontent.com/Lenna-Robotics-Research-Lab/Lenna-Mobile-Robot-ONE/main/hardware/electronics/究导向**:硬件和软件设计均强调可复现性和可扩展性,适合机器人课https://raw.githubusercontent.com/Lenna-Robotics-Research-Lab/Lenna-Mobile-Robot-ONE/main/software/embedded/| 参数 | 说明 | |------|------| |https://raw.githubusercontent.com/Lenna-Robotics-Research-Lab/Lenna-Mobile-Robot-ONE/main/softwahttps://raw.githubusercontent.com/Lenna-Robotics-Research-Lab/Lenna-Mobile-Robot-ONE/main/hardware/mechanics/)学模型 | https://raw.githuhttps://raw.githubusercontent.com/Lenna-Robotics-Research-Lab/Lenna-Mobile-Robot-ONE/main/hardware/electronics/)esearch-Lab/Lenna-Mobhttps://raw.githubusercontent.com/Lenna-Robotics-Research-Lab/Lenna-Mobile-Robot-ONE/main/software/embedded/)nual/matic Model) |https://raw.githubusercontent.com/Lenna-Robotics-Research-Lab/Lenna-Mobile-Robot-ONE/main/software/ros/).githubusercontent.chttps://raw.githubusercontent.com/Lenna-Robotics-Research-Lab/Lenna-Mobile-Robot-ONE/main/docs/user_manual/)b/Lenna-Mobile-Robothttps://raw.githubusercontent.com/Lenna-Robotics-Research-Lab/Lenna-Mobile-Robot-ONE/main/docs/figures/)n Nano B01 或 Nvidia Jetson Orin Nano | | 低层控制器 (LCB) | 自研Bardia Board(基于ARM微控制器) | | 通信协议 | UART串口 + 自定义协议 | | 传感器 | LiDAR(激光雷达) | | 软件框架 | ROS (Robot Operating System) | | 支持功能 | 遥控操作、SLAM建图、自主导航 | | 机械结构 | 三层堆叠模块化设计 | | 设计工具 | SolidWorks (机械), 定制PCB (电子) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Nvidia Jetson Nano B01 或 Orin Nano | 1 | — | 高层控制器 |
| 自研Bardia Board (LCB) | 1 | — | 低层控制器,需自行打样焊接 |
| LiDAR 激光雷达 | 1 | — | 用于SLAM和导航 |
| 直流减速电机(带编码器) | 2 | — | 差速驱动 |
| 3D打印外壳及支架 | 1套 | — | 三层堆叠结构 |
| 锂电池组 | 1 | — | 为Jetson和电机供电 |
| USB转UART模块 | 1 | — | 调试或备用通信 |
| 螺丝、螺母、铜柱等 | 若干 | — | 组装用 |
3D 模型
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 2/5
⚪ 感知与观察: 3/5
⚪ 数理与计算: 4/5
⚪ 动手与操作: 5/5
⚪ 狂热与坚持: 4/5
⚪ 创造与创新: 4/5
项目图库



所需技能
🔧 **动手能力**:需要熟练使用3D打印机、焊接工具和螺丝刀进行机器人的组装与调试。能够处理PCB焊接和机械结构装配。
💻 **编程能力**:需要具备C/C++(嵌入式)和Python(ROS)编程能力。熟悉ROS框架、launch文件编写、节点通信以及SLAM/Navigation栈的配置。
⚡ **电子电路**:需要理解微控制器(ARM)、电机驱动、UART通信、电源管理等基础知识。能够阅读原理图并使用万用表进行电路调试。
适用场景
**机器人学课程教学**:作为移动机器人课程的实践平台,学生可以学习ROS、SLAM、导航和嵌入式控制。
**SLAM与导航算法研究**:研究人员可以基于此平台测试和验证新的SLAM或路径规划算法。
**自主移动机器人原型开发**:开发者可以以此为基础,快速搭建用于物流、巡检等场景的机器人原型。
**机器人竞赛**:适合参加需要自主导航能力的机器人竞赛。