搜索 "iros" 找到 3 个结果
LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain
SuMa++: Efficient LiDAR-based Semantic SLAM (Chen et al IROS 2019)
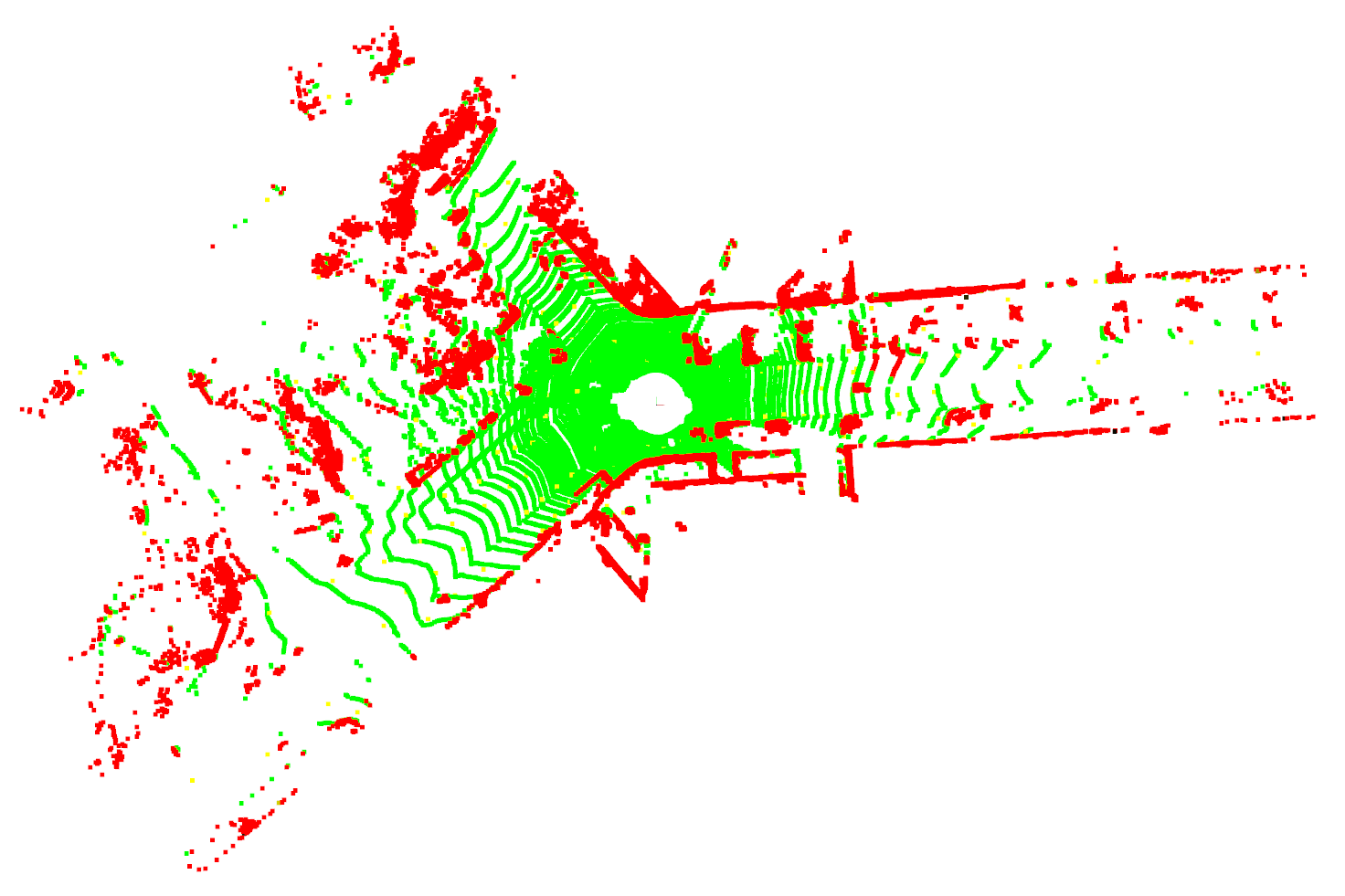
Patchwork++: Fast and robust ground segmentation method for 3D LiDAR scans. @ IROS'22