待补充
url-kaist/patchwork-plusplus
3/5
🧩 软硬件结合
已发布
项目简介
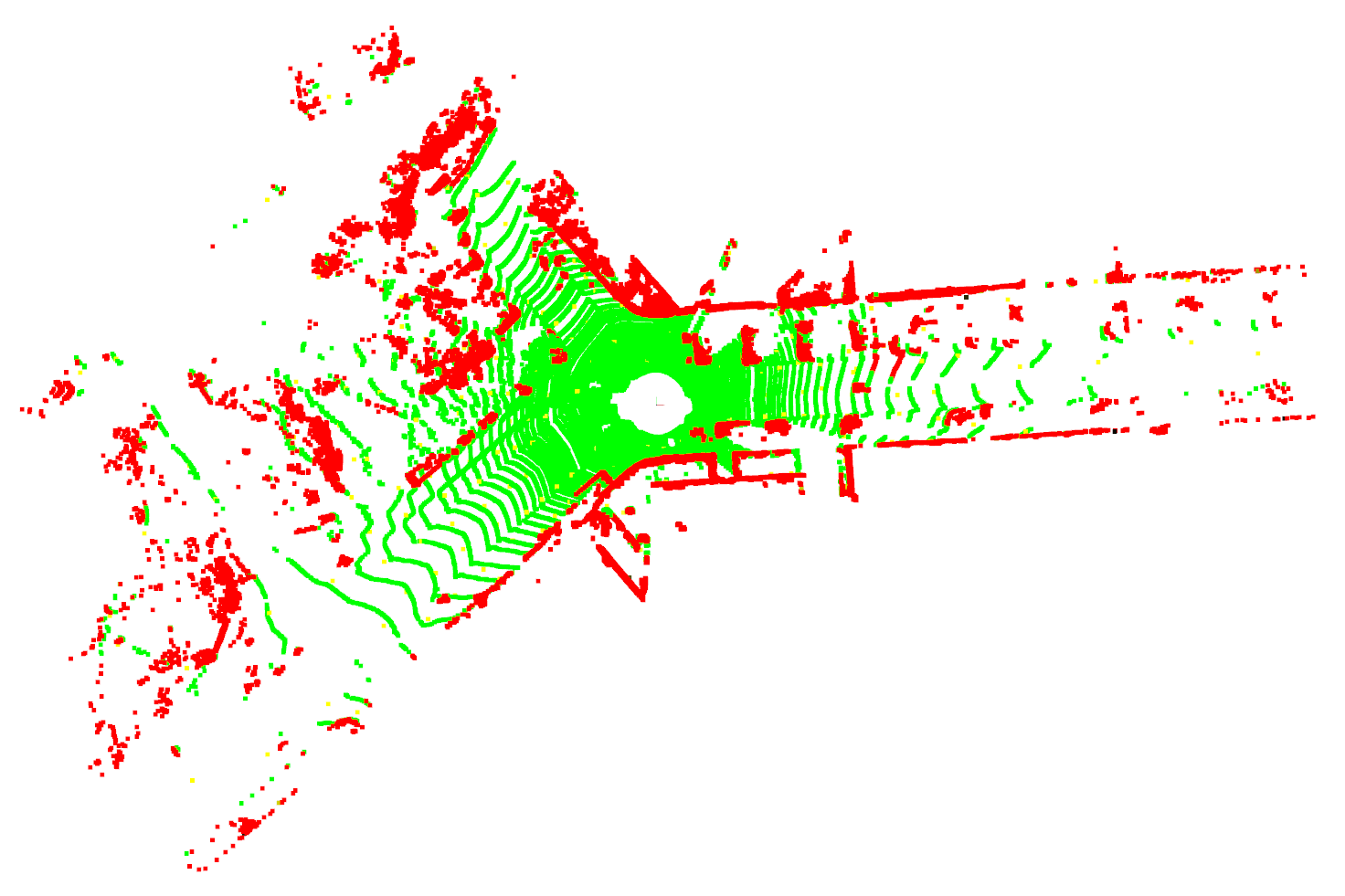
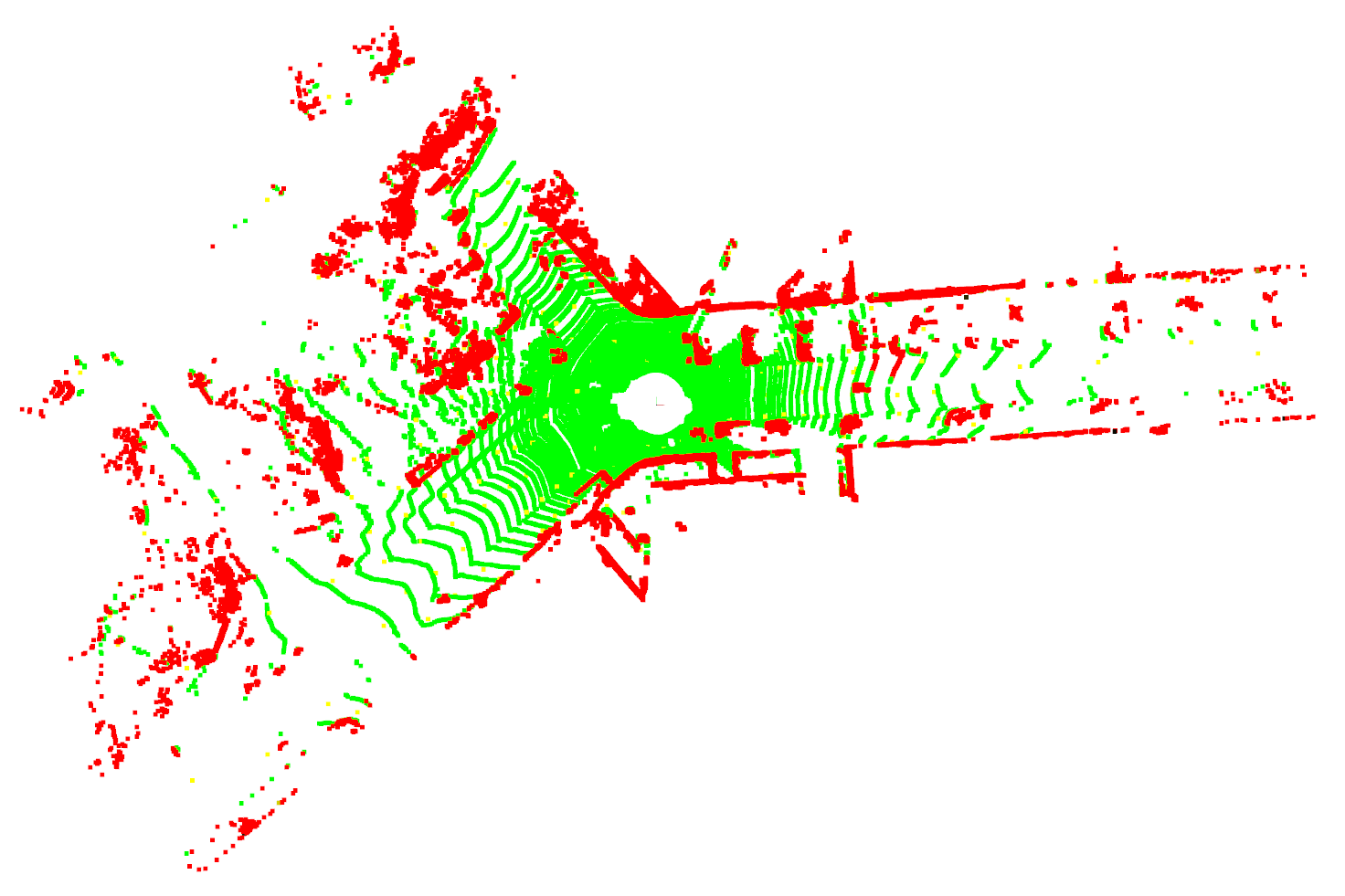
Patchwork++: Fast and robust ground segmentation method for 3D LiDAR scans. @ IROS'22
Patchwork++ 是由 KAIST 团队开发的一款针对 3D 点云数据的快速、鲁棒且自适应的地面分割算法,是经典算法 Patchwork 的升级版本。该项目主要解决自动驾驶、机器人导航和三维重建等场景中,如何从杂乱的三维激光雷达点云中高效、准确地分离出地面与非地面点的问题。传统地面分割算法在面对复杂地形(如陡坡、草地)或传感器噪声(如反射伪影)时,往往需要手动调整大量阈值,泛化能力差。Patchwork++ 通过引入四项核心创新机制实现了自适应处理:自适应高程与平坦度阈值、基于强度的反射噪声去除(RNR)、垂直结构抑制(RVPF)以及基于概率的地面恢复(TGR)。这些机制使得算法能够自动适应不同环境,无需人工调参,同时保持极高的处理速度。项目技术栈以 C++ 为核心,提供高性能的原生实现,并通过 pybind11 提供了完整的 Python 绑定,支持 pip 一键安装。此外,项目还深度集成了 ROS2(Humble),方便机器人开发者直接使用。项目支持 Ubuntu、macOS 和 Windows 多平台,依赖极少(仅需 Eigen 和 CMake),并提供了完整的 SemanticKITTI 评估工具链,便于学术研究中的复现与对比。无论是用于自动驾驶汽车的路面感知、服务机器人的地形识别,还是无人机测绘中的点云预处理,Patchwork++ 都能提供开箱即用、稳定可靠的地面分割能力。
标签
项目特点
**自适应阈值**:自动调整高程与平坦度阈值,适应不同地形,无需手动设置参数。
**反射噪声去除(RNR)**:基于强度信息自动滤除由反射伪影引起的噪声点,提升分割质量。
**垂直结构抑制(RVPF)**:抑制垂直结构(如墙壁、树干)对地面分割的干扰,减少误分割。
**基于概率的地面恢复(TGR)**:通过概率模型恢复被错误剔除的地面点,提高召回率。
**快速鲁棒**:在复杂场景下保持实时性能,适用于自动驾驶和机器人等实时系统。
**开源易用**:提供 C++ 实现,支持 ROS,可直接集成到现有点云处理管线。
技术规格
| 输入点云格式 | |
|---|---|
| 输出 | |
| 算法核心 | |
| 支持传感器 | |
| 编程语言 | |
| 依赖库 | |
| 操作系统 | |
| ROS 支持 | |
| 实时性能 | |
| 开源协议 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Eigen | 1 | — | 线性代数库 |
| PCL (Point Cloud Library) | 1 | — | 点云处理库 |
| OpenMP | 1 | — | 并行计算支持 |
| ROS (Melodic/Noetic) | 1 | — | 用于 ROS 节点集成 |
| Catkin | 1 | — | ROS 构建工具 |
| 激光雷达(如 Velodyne VLP-16) | 1 | — | 测试用传感器 |
能力画像
**记忆与知识检索**:2/5 — 项目本身不涉及知识检索,但依赖对点云处理算法的理解。
**动手与操作**:3/5 — 需要配置编译环境、安装依赖、运行示例,涉及一定的动手能力。
**编程与算法**:4/5 — 核心算法涉及 C++ 编程、平面拟合、概率模型等,需要较强的算法理解。
**设计与建模**:2/5 — 不涉及硬件或系统设计,但算法架构设计有一定复杂度。
**实验与调试**:4/5 — 需要调试点云数据、调整参数、评估分割效果,实验环节较多。
**协作与分享**:2/5 — 开源项目,可通过 Issue/PR 协作,但主要是个体使用。
**学习与研究**:4/5 — 适合学习地面分割算法、自适应阈值、概率模型等前沿技术。
**系统集成**:3/5 — 可集成到 ROS 或自动驾驶系统,但需要一定的系统整合经验。
项目图库


所需技能
C++ 编程基础
点云处理基础(PCL 库使用)
Linux 命令行与编译环境配置
基本线性代数与几何知识
ROS 基础(可选,用于机器人集成)
激光雷达传感器基础知识
适用场景
自动驾驶汽车的地面与非地面点云分割
移动机器人导航中的地形感知与障碍物检测
三维重建中的地面滤除与场景理解
无人机测绘中的地面点提取
智能交通系统中的道路边界检测
科研教学中的点云处理算法实验与对比