Webots 开源机器人模拟器
webots
机器人
3/5
🧩 软硬件结合
已发布
项目简介
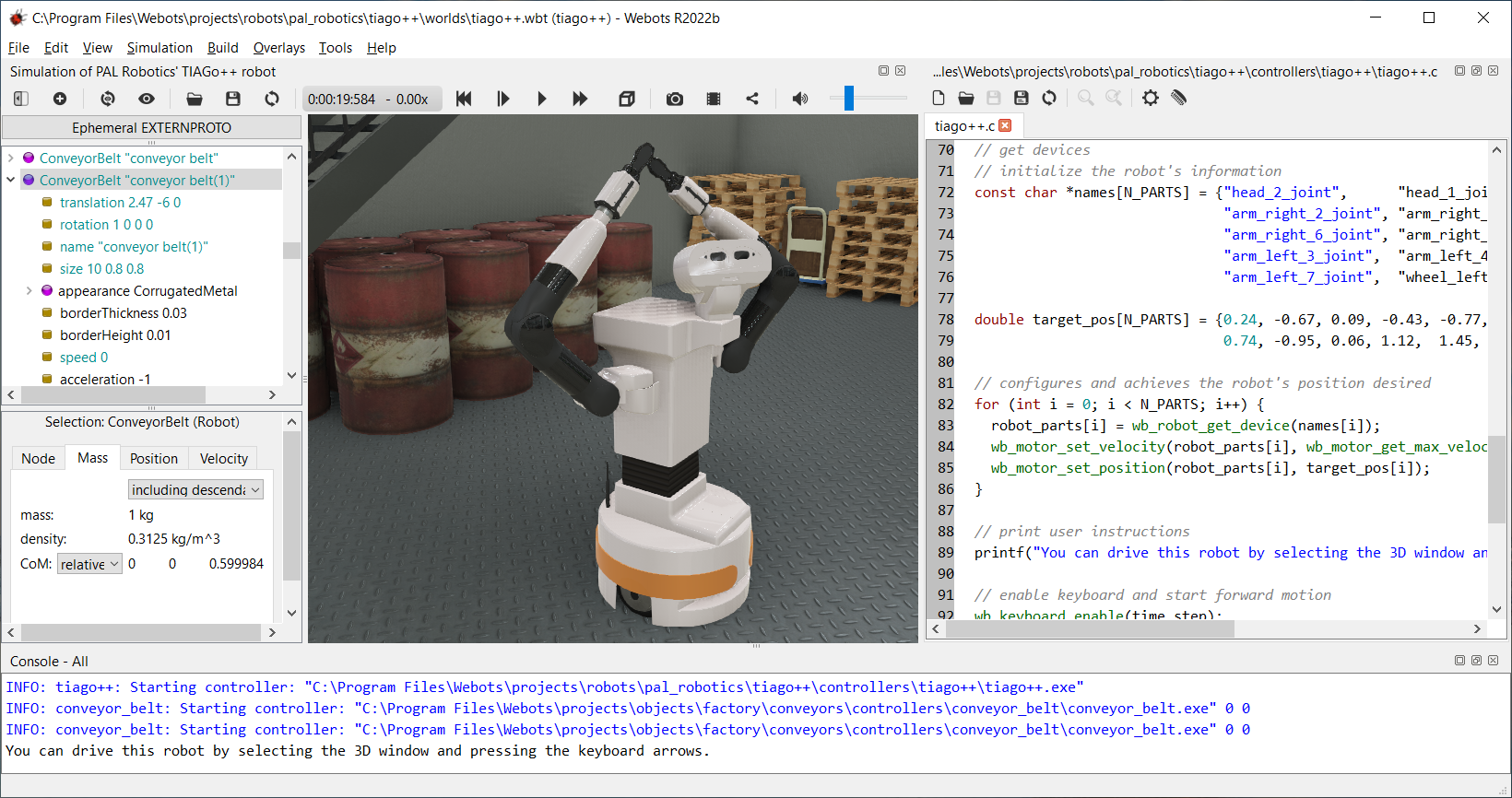
Webots Robot Simulator
Webots 是一款开源机器人仿真软件,由瑞士洛桑联邦理工学院(EPFL)于1996年最初开发,后由 Cyberbotics 公司持续维护,并于2018年正式开源。它提供了一个完整的开发环境,用于对机器人、车辆及各类机械系统进行建模、编程和仿真。无论是机器人领域的初学者还是资深研究者,都能通过它快速搭建虚拟原型并验证算法。
标签
项目特点
**开源免费**:基于 Apache 2.0 许可证,完全开源,可自由使用和修改。
**跨平台支持**:提供 Linux、Windows 和 macOS 的预编译二进制文件,安装简便。
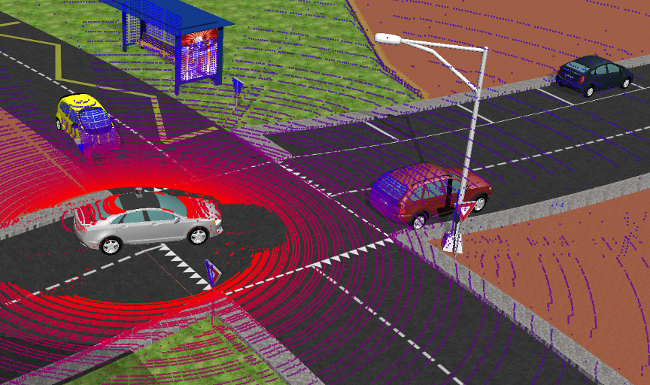
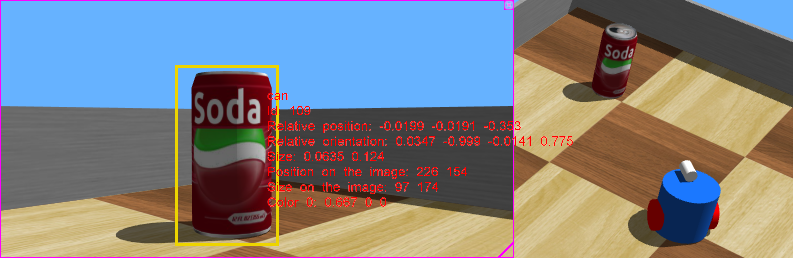
**丰富的机器人库**:内置多种机器人模型(如 NAO、PR2、Pioneer 等)和传感器(如激光雷达、摄像头、IMU 等)。
**多语言编程接口**:支持 C、C++、Python、Java 和 MATLAB 等多种编程语言进行机器人控制。
**逼真的物理引擎**:基于 ODE(Open Dynamics Engine)提供高保真的物理仿真。
**可视化调试工具**:提供实时传感器数据可视化、3D 场景渲染和调试界面。
**活跃的社区支持**:拥有 Discord 聊天室、GitHub Discussions 和详细的官方文档。
**云端仿真**:通过 webots.cloud 平台可在线查看和运行仿真。
技术规格
| 开发语言 | C++ (核心), Python, Java, MATLAB (API) |
|---|---|
| 物理引擎 | ODE (Open Dynamics Engine) |
| 渲染引擎 | OpenGL 3.3 |
| 支持操作系统 | Linux (Ubuntu 20.04+), Windows 10/11, macOS 11+ |
| 编程接口 | C, C++, Python, Java, MATLAB, ROS 2 |
| 许可证 | Apache 2.0 |
| 最新版本 | 详见 [GitHub Releases](https://github.com/cyberbotics/webots/releases/latest) |
| 硬件要求 | 推荐 4GB+ RAM, 支持 OpenGL 3.3 的 GPU |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Webots 模拟器 | 1 | — | 从 [GitHub Releases](https://github.com/cyberbotics/webots/releases/latest) 下载 |
| 计算机 | 1 | — | 推荐 4GB+ RAM, 支持 OpenGL 3.3 的 GPU |
| 可选:真实机器人 | 1 | — | 用于将仿真代码部署到实体机器人 |
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 2/5
⚪ 感知与观察: 3/5
⚪ 数理与计算: 3/5
⚪ 动手与操作: 2/5
⚪ 狂热与坚持: 3/5
⚪ 创造与创新: 4/5
项目图库

视频
所需技能
🔧 **动手能力**:无需硬件动手能力,但若需将仿真部署到真实机器人,则需要基本的机器人组装和调试技能。
💻 **编程能力**:需要至少掌握一种编程语言(C、C++、Python、Java 或 MATLAB),用于编写机器人控制程序。
⚡ **电子电路**:基本了解传感器和执行器的工作原理有助于更好地利用仿真功能,但非必需。
适用场景
**机器人教育与培训**:适合高校和培训机构用于机器人课程教学,学生无需真实硬件即可学习机器人编程和控制。
**算法研究与验证**:研究人员可以在仿真环境中快速验证 SLAM、路径规划、计算机视觉等算法。
**工业自动化仿真**:用于工厂自动化、物流机器人等工业场景的仿真和优化。
**机器人竞赛准备**:如 RoboCup、FIRST 等竞赛的仿真训练和策略测试。
**开源机器人开发**:开发者可以在仿真中调试和测试新机器人设计,再部署到实体机器人。