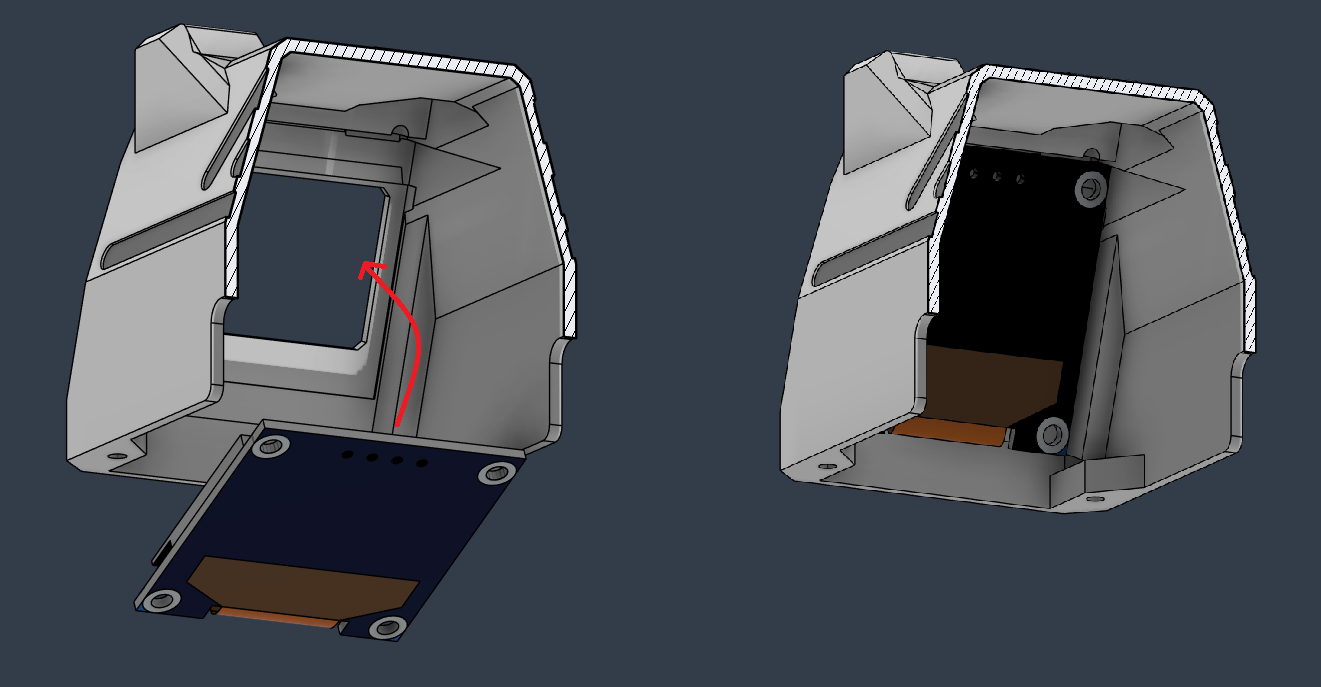
An open and affordable mini quadruped robot based on ESP32.
sesame-robot
ESP32, 机器人
2/5
已发布
项目简介
基于ESP32的开源廉价迷你四足机器人。
Sesame Robot 是一个基于 ESP32 微控制器的开源四足机器人项目,专为不同技术水平的创客和工程师设计。项目的核心理念是让行走机器人开发变得触手可及——只需约 50-60 美元的硬件成本、基础的焊接技能、一台 3D 打印机以及对 Arduino IDE 的基本了解,就能组装出一个属于自己的桌面机器人伙伴。
标签
项目特点
**全开源设计**:硬件原理图、PCB、3D 打印文件、固件代码全部公开,可自由修改。
**低成本入门**:核心部件仅需 ESP32 开发板、8 个 SG90 舵机和 3D 打印件,总成本控制在百元级别。
**多端控制**:支持手机 App(蓝牙/Wi-Fi)和 Web 端控制,无需额外遥控器。
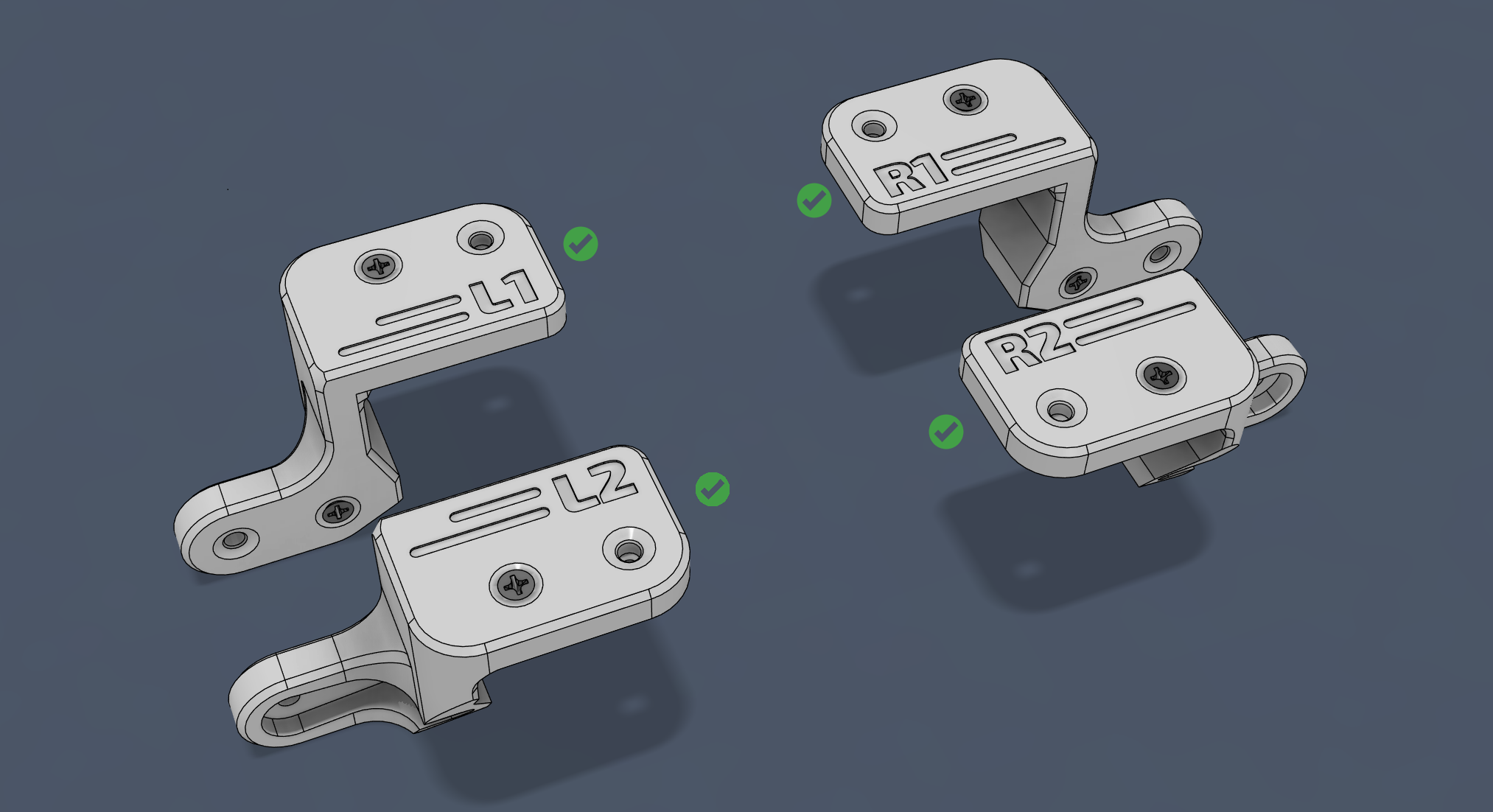
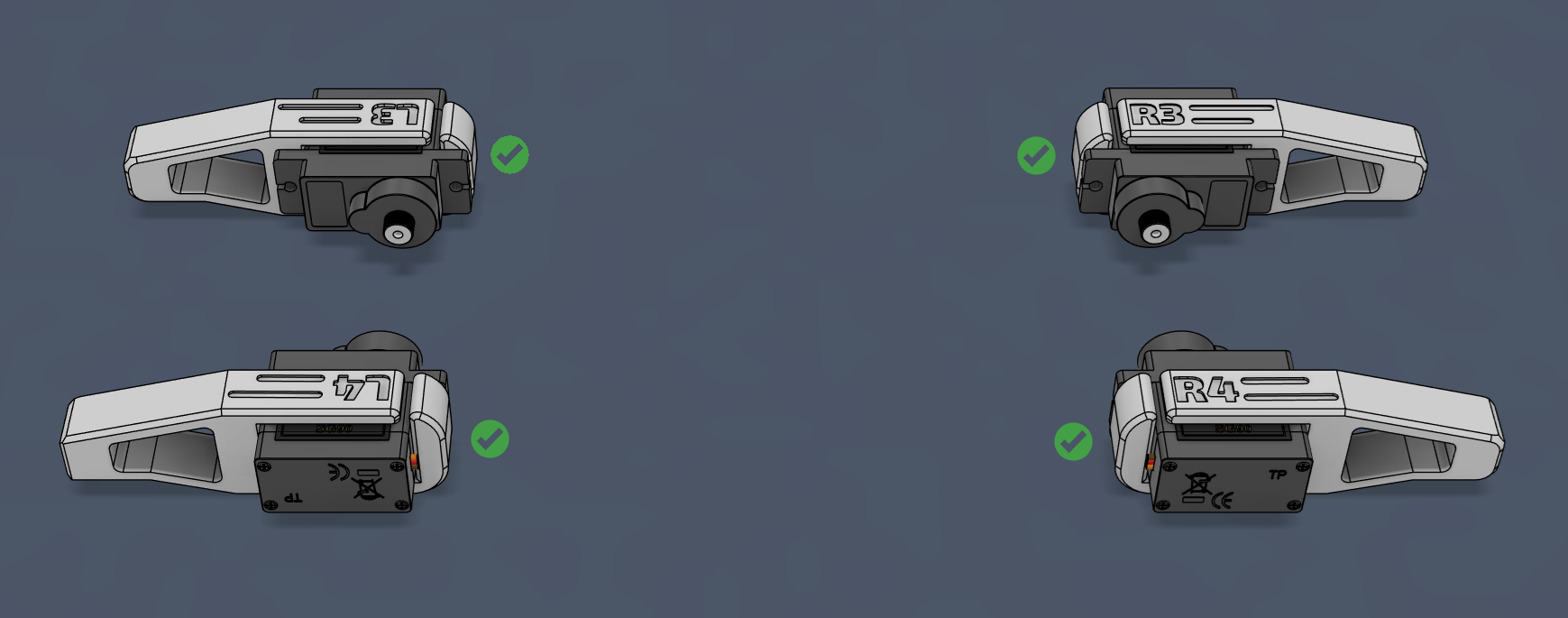
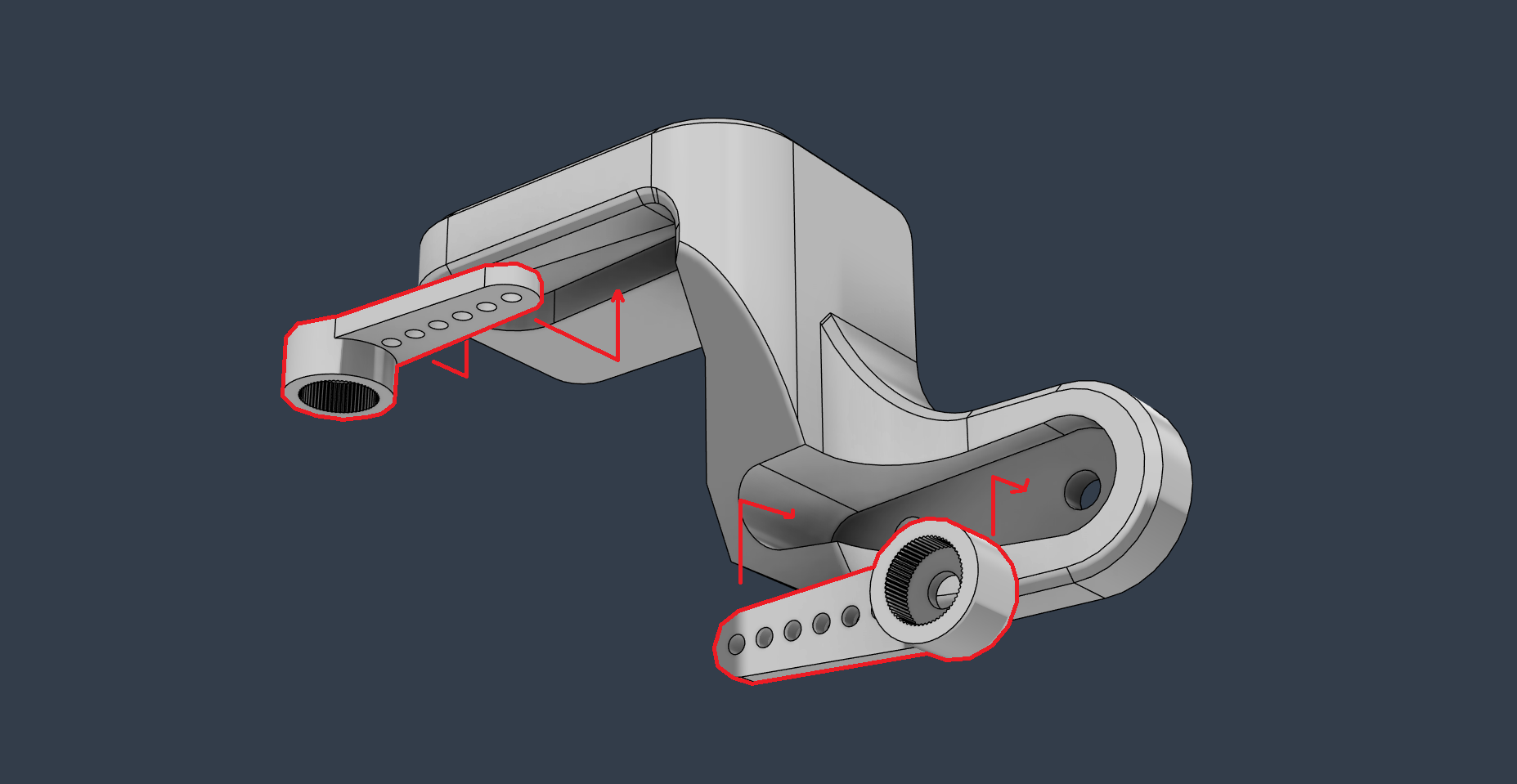
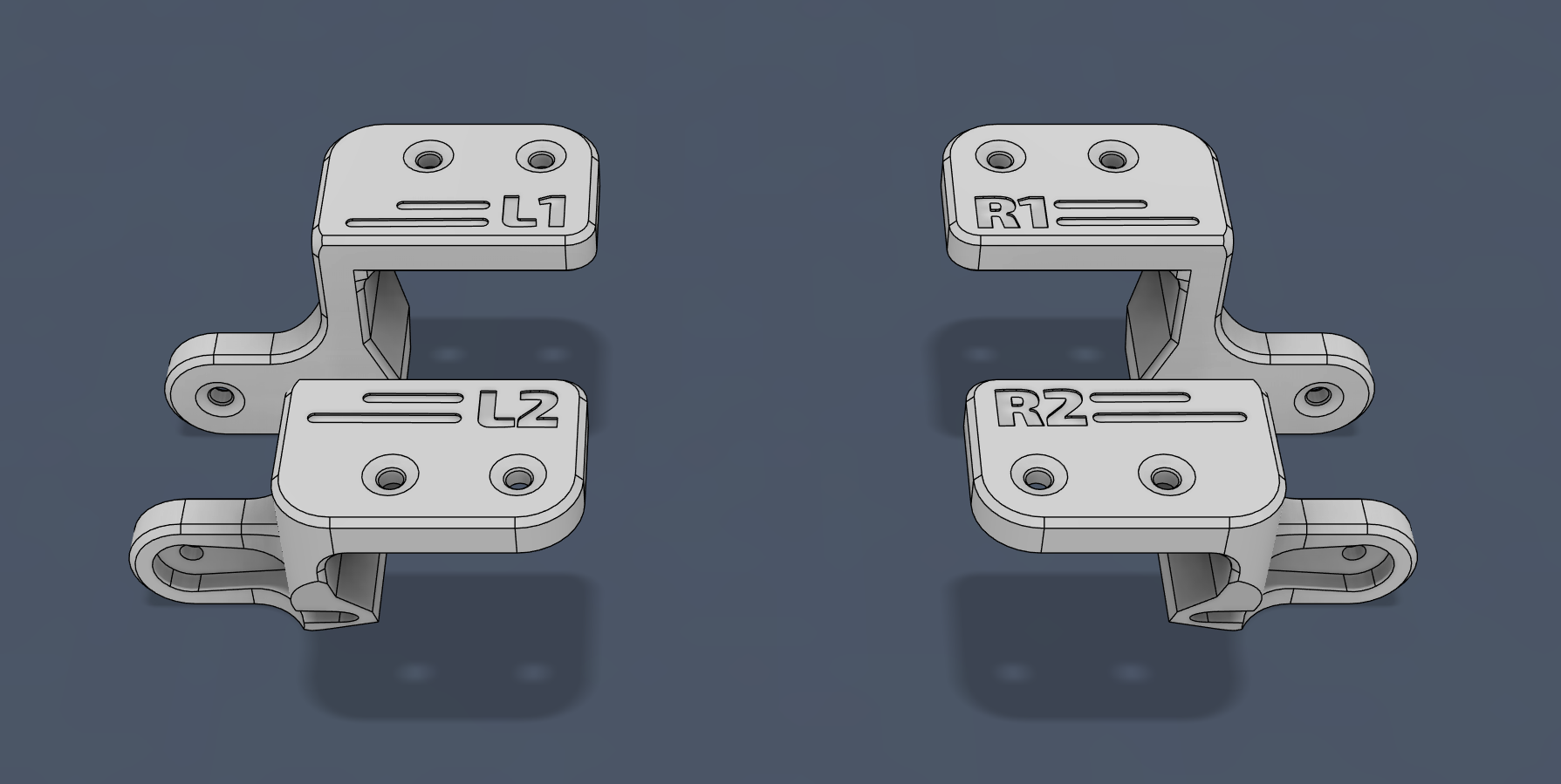
**模块化结构**:腿部采用标准舵机连接件,方便更换或升级部件。
**可编程动作**:内置多种步态(行走、转弯、蹲起),也支持自定义动作序列。
**Wi-Fi 远程操控**:通过 ESP32 的 Wi-Fi 功能,可在局域网内实时控制机器人。
技术规格
| 主控芯片 | ESP32(双核 240MHz,Wi-Fi + 蓝牙) |
|---|---|
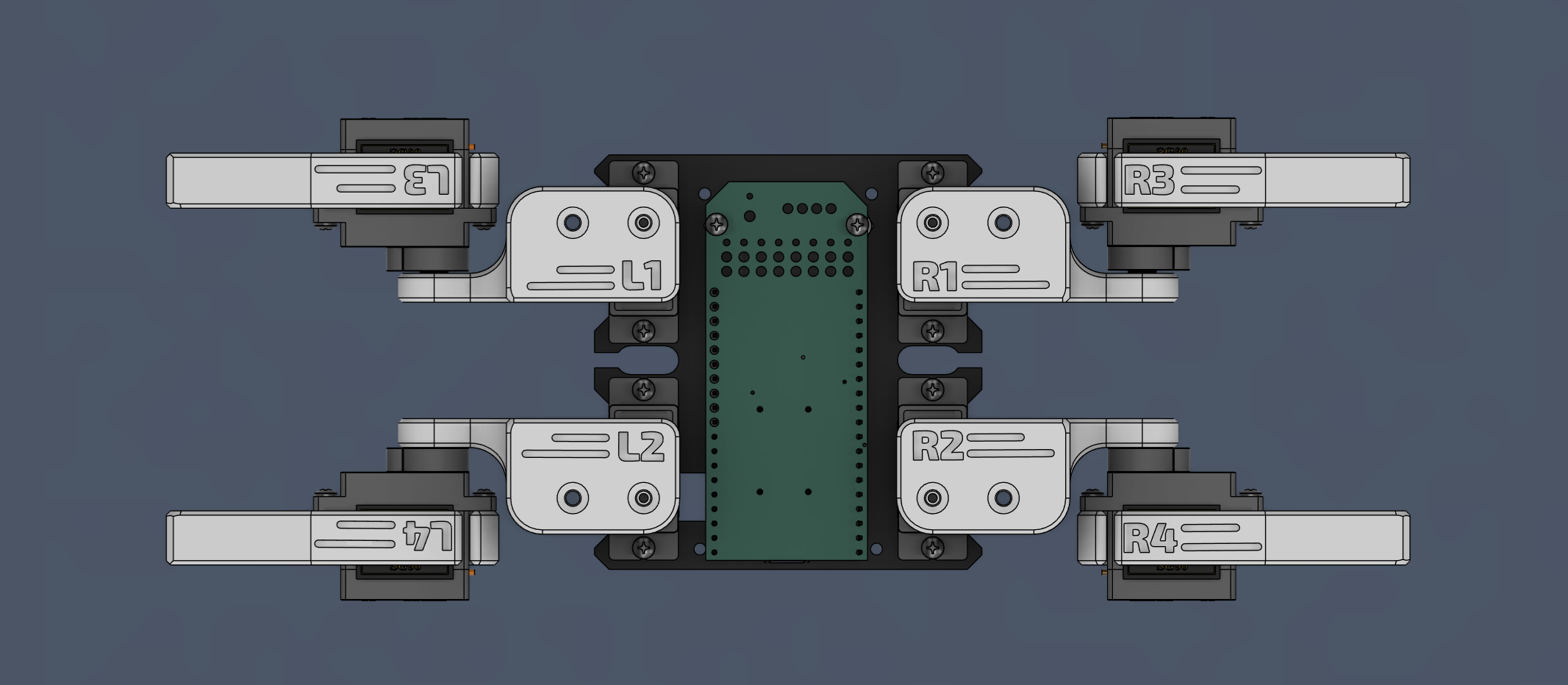
| 舵机 | SG90 微型舵机 × 8(每个自由度 1 个) |
| 自由度 | 8(每条腿 2 个自由度) |
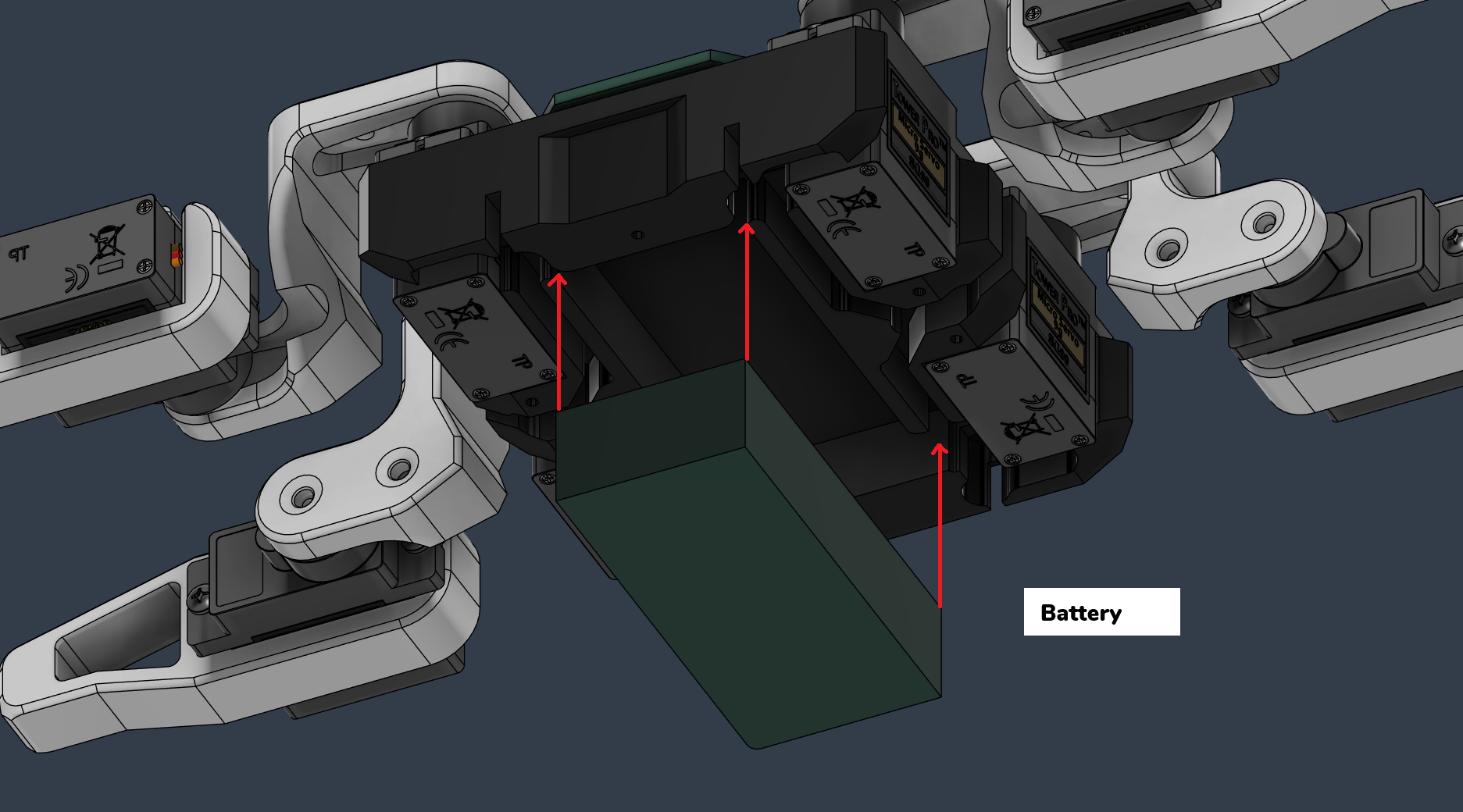
| 供电方式 | 3.7V 锂电池(18650 或类似)或 USB 5V |
| 通信方式 | Wi-Fi(802.11 b/g/n)、蓝牙 4.2 |
| 控制接口 | 手机 App(iOS/Android)、Web 页面 |
| 机身尺寸 | 约 120mm × 80mm × 70mm(组装后) |
| 重量 | 约 200g(含电池) |
| 编程语言 | C/C++(Arduino 框架) |
| 3D 打印材料 | PLA 或 PETG(推荐 0.2mm 层高) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| ESP32 开发板(如 NodeMCU-32S) | 1 | — | 推荐带 USB 串口 |
| SG90 微型舵机 | 8 | — | 180° 或 360° 均可 |
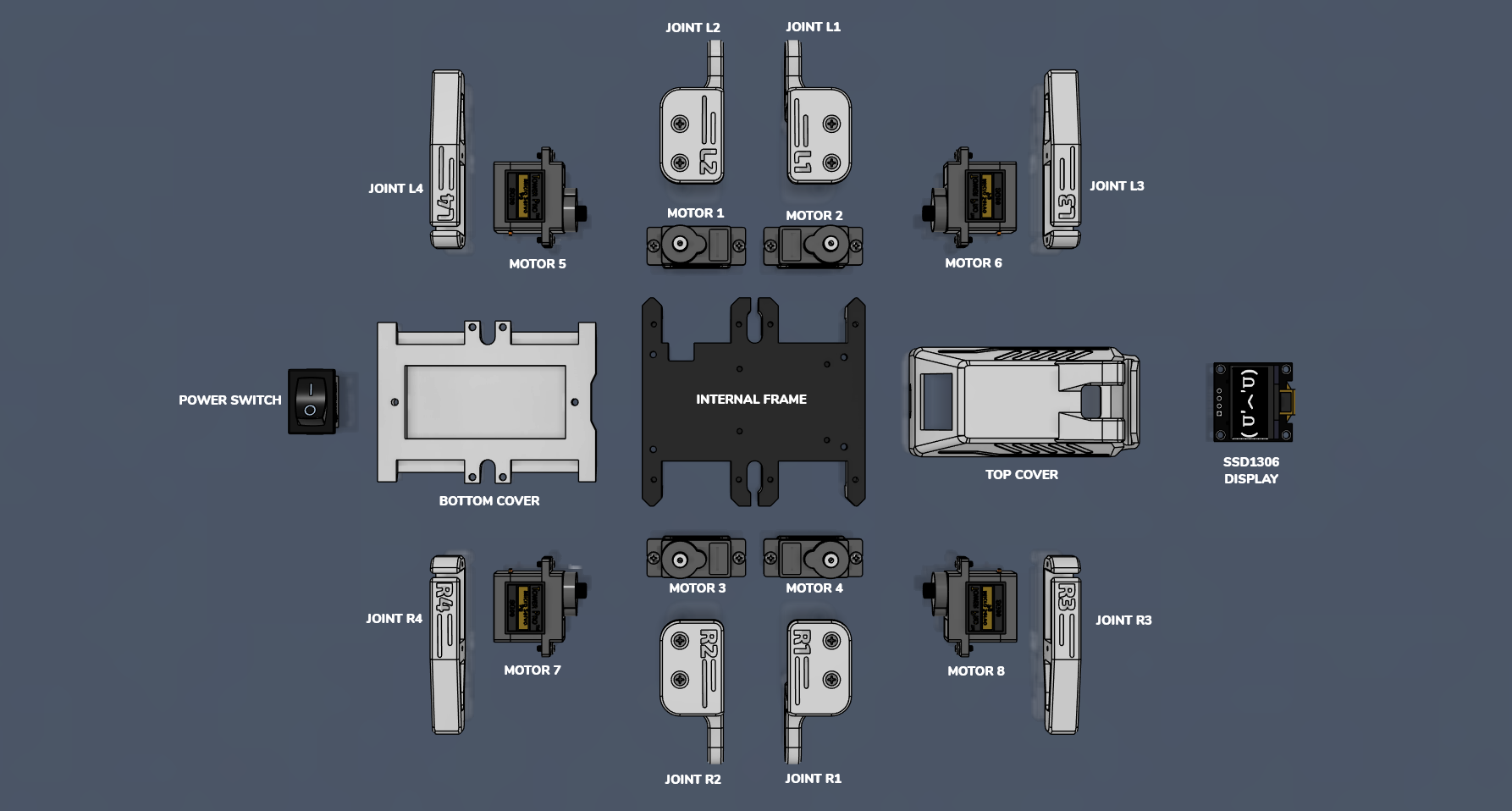
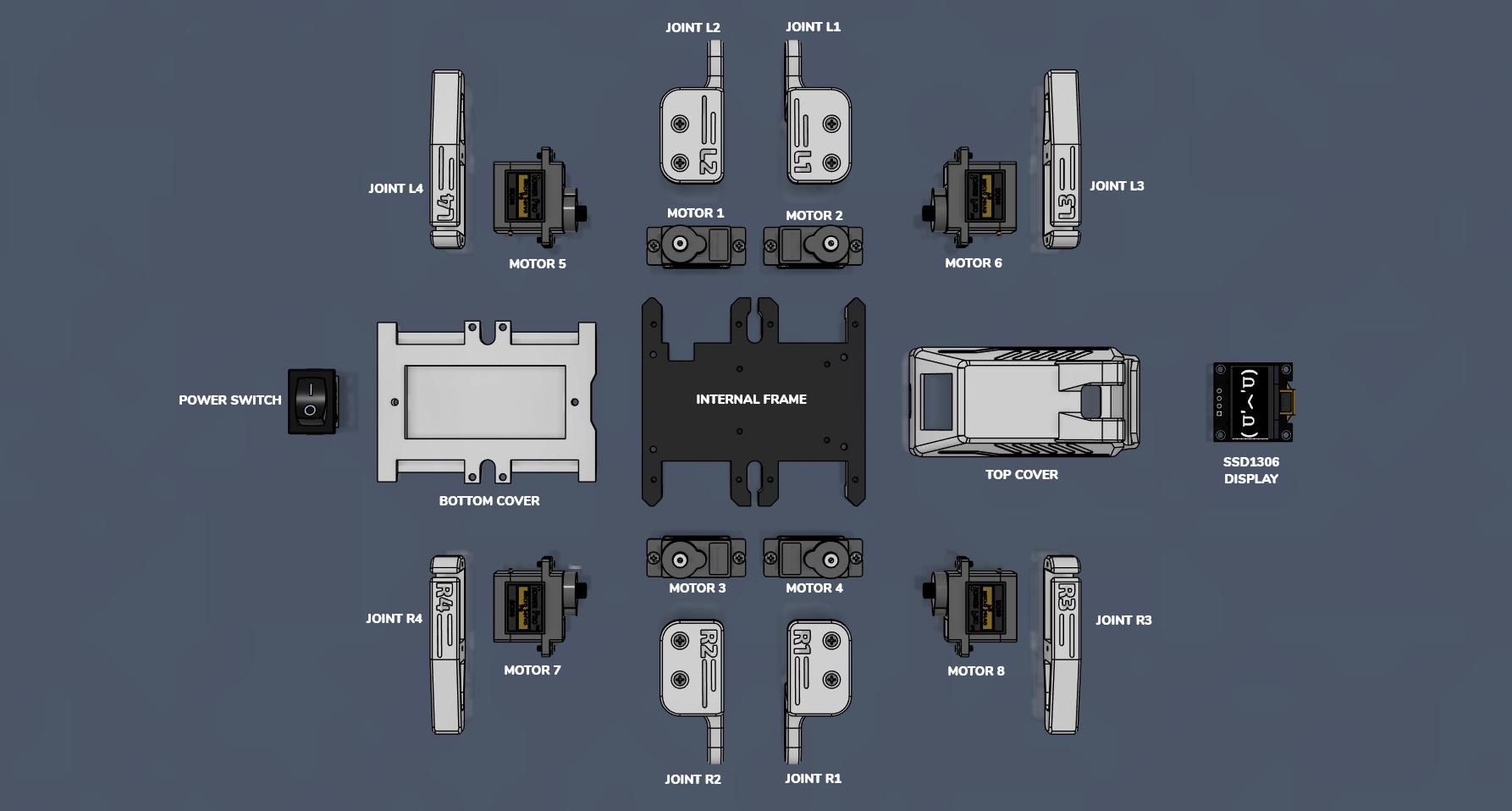
| 3D 打印机身零件 | 1 套 | — | 约 10 个独立零件 |
| 18650 锂电池(3.7V) | 1 | — | 或 2 节 AAA 电池盒 |
| 18650 电池盒 | 1 | — | 带开关和 JST 接口 |
| 杜邦线(公对母) | 20 根 | — | 用于舵机与 ESP32 连接 |
| M2 × 6mm 螺丝 | 20 颗 | — | 固定舵机和结构件 |
| M2 × 10mm 螺丝 | 10 颗 | — | 固定电池盒等 |
| M2 螺母 | 20 个 | — | 配合螺丝使用 |
| 十字螺丝刀 | 1 | — | 组装必备 |
3D 模型
能力画像
**记忆与知识检索**:3/5 — 需要查阅舵机接线、ESP32 引脚定义等基础资料,但项目文档较全。
**动手与操作**:4/5 — 需要焊接、螺丝组装、3D 打印件后处理,适合有一定手工经验的人。
**编程与算法**:3/5 — 固件基于 Arduino,需修改步态参数或动作序列,但无需复杂算法。
**设计与建模**:2/5 — 直接使用现成 3D 文件,若想修改结构需掌握 Fusion 360 等建模软件。
**实验与调试**:3/5 — 需要调试舵机角度、Wi-Fi 连接、步态稳定性,建议用串口监视器。
**协作与分享**:2/5 — 项目为个人作品,社区贡献较少,但可自行 fork 修改。
**学习与研究**:4/5 — 适合学习四足机器人运动学、ESP32 无线控制、舵机 PWM 原理。
**系统集成**:3/5 — 需将硬件、固件、App 三者联调,但模块化设计降低了集成难度。
项目图库


所需技能
基础焊接能力(焊接杜邦线、电池盒)
3D 打印操作(切片、调平、后处理)
Arduino 编程基础(修改参数、上传固件)
基础电路知识(舵机接线、电源管理)
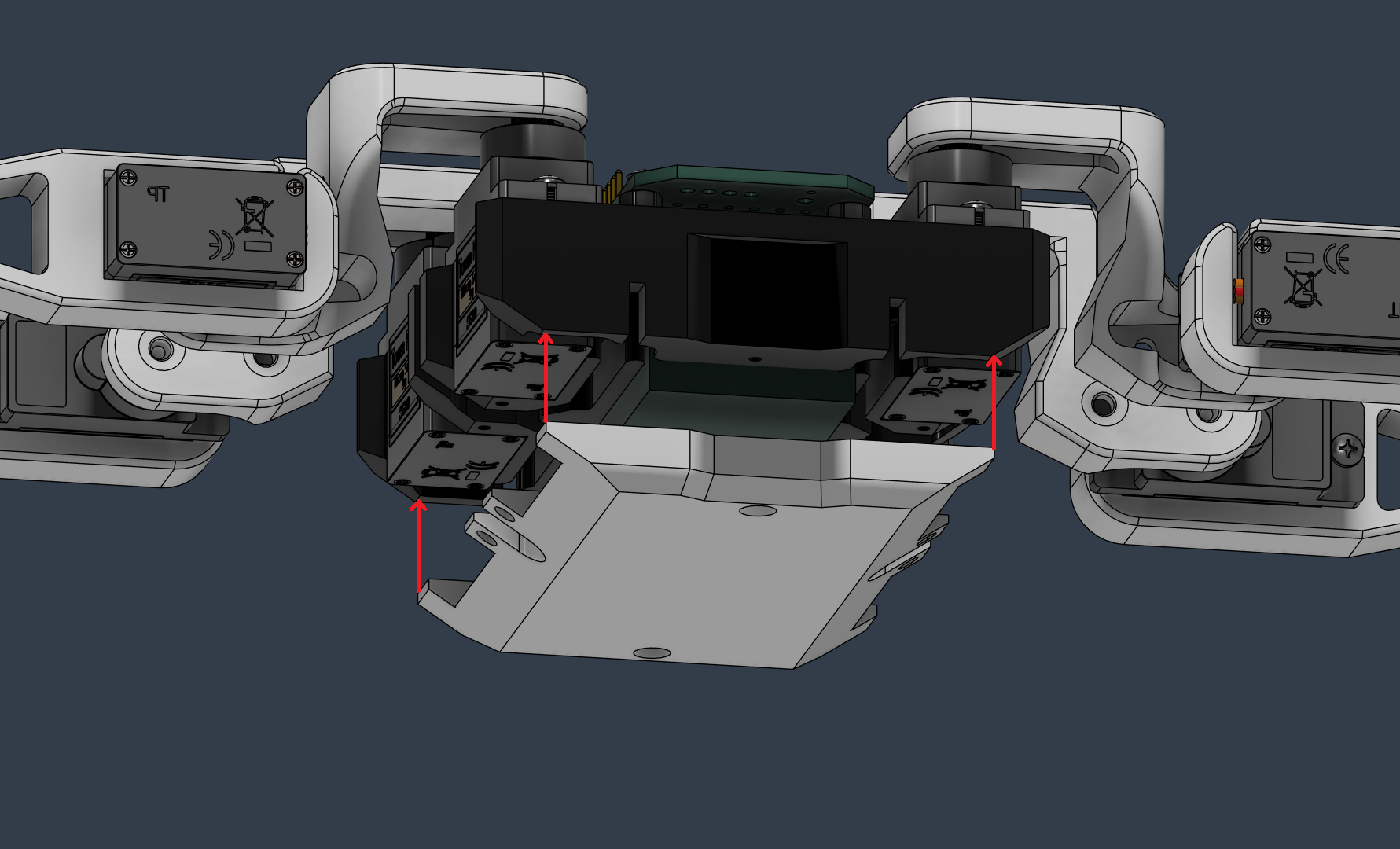
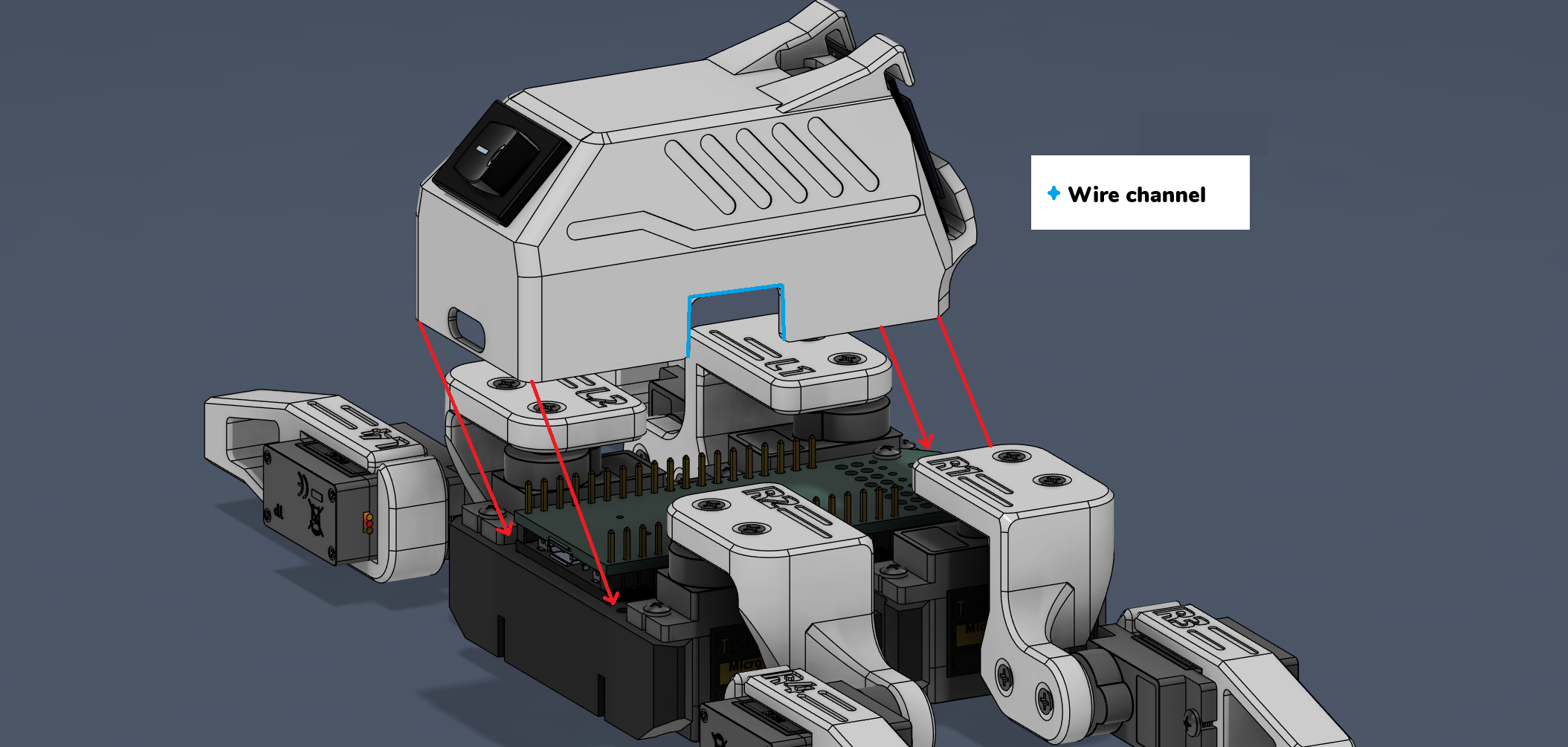
动手组装能力(螺丝固定、线缆整理)
故障排查能力(舵机不转、Wi-Fi 连不上等)
适用场景
**机器人入门学习**:用低成本体验四足机器人的完整开发流程。
**STEM 教育套件**:适合学校或创客空间作为教学项目。
**个人 DIY 项目**:爱好者可在此基础上增加传感器(如超声波、IMU)扩展功能。
**远程控制演示**:通过 Wi-Fi 在手机或电脑上控制机器人行走。
**步态算法实验**:修改代码测试不同步态(三角步、波浪步等)。
**开源硬件展示**:作为开源硬件社区的作品展示或比赛项目。