Autoware 架构提案
AutowareArchitectureProposal.proj
车载/ADAS
1/5
🧩 软硬件结合
已发布

项目简介
Autoware架构提案可行性研究的源代码。
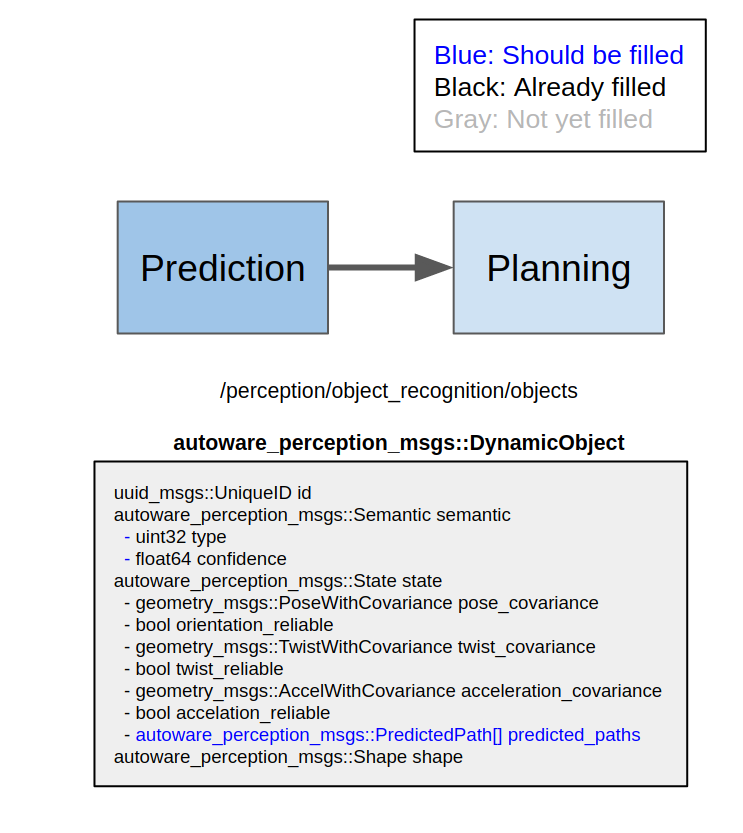
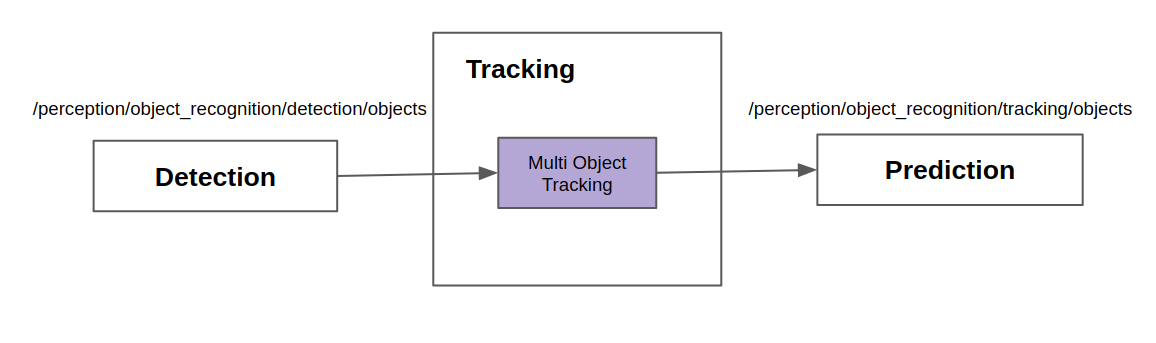
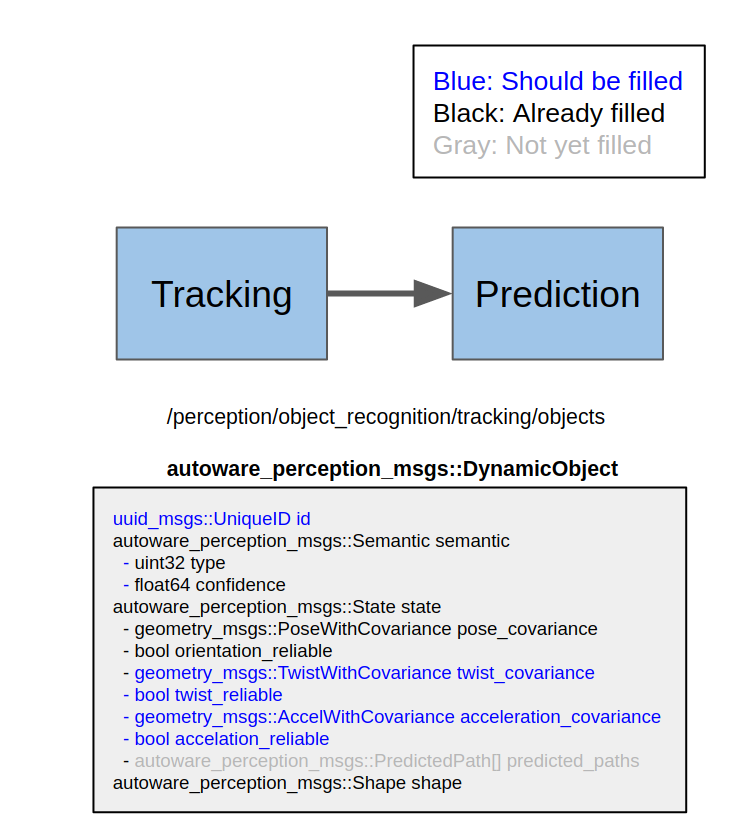
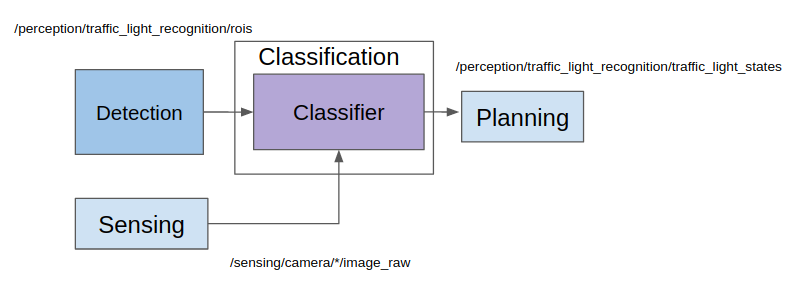
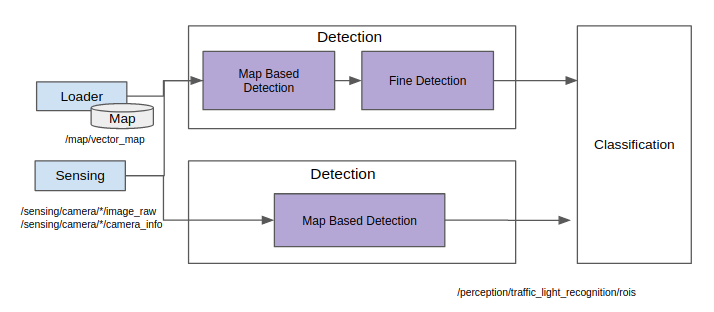
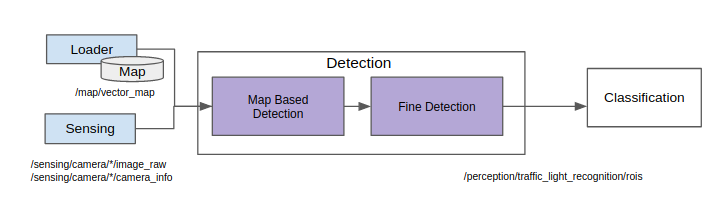
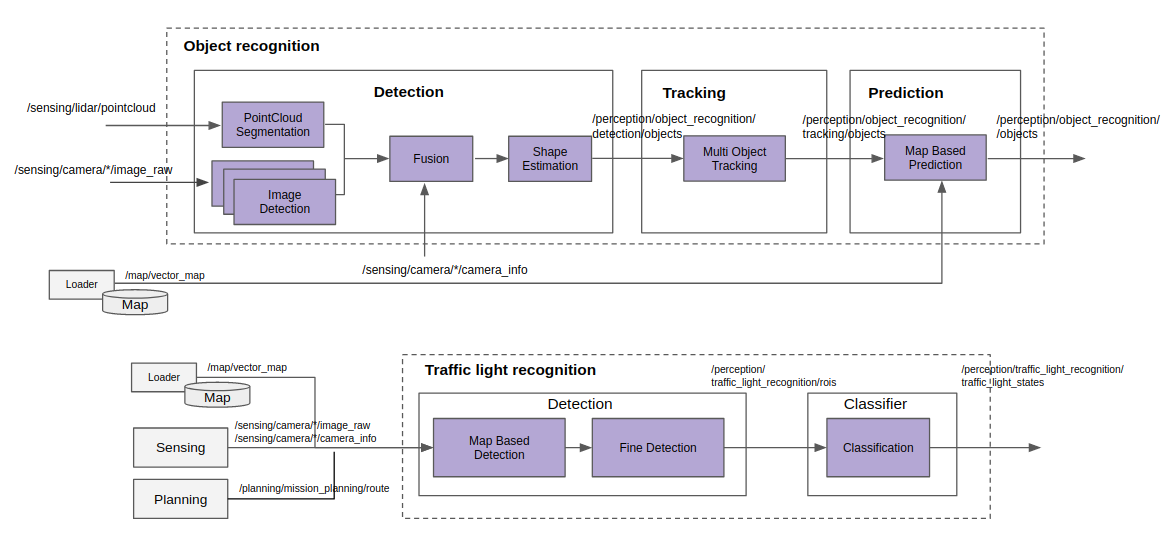
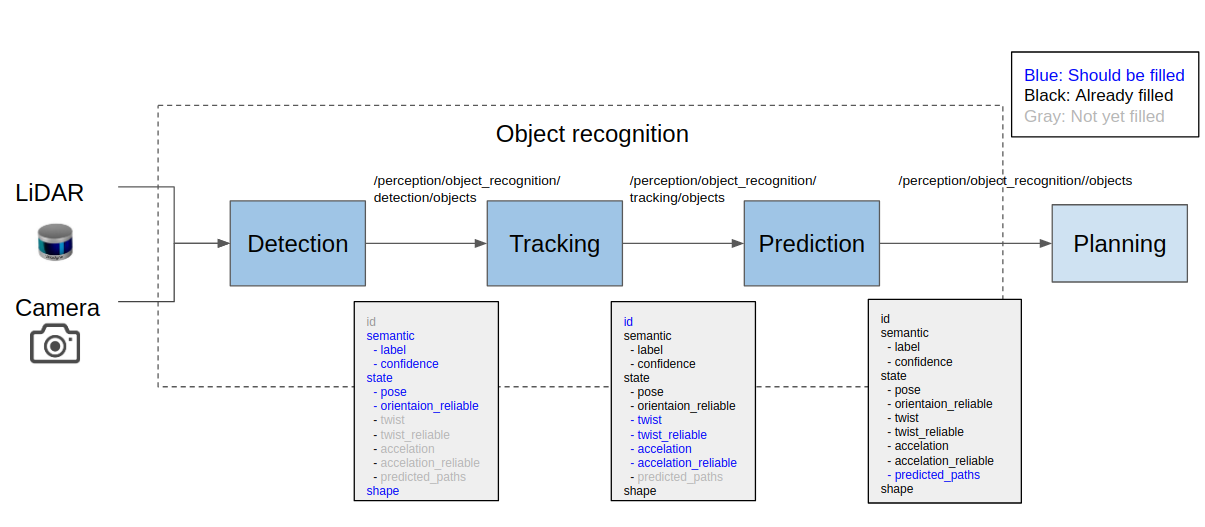
AutowareArchitectureProposal 是 Autoware 基金会旗下自动驾驶软件 Autoware 的架构设计与探索仓库。该项目旨在为开源自动驾驶系统建立一套清晰、可扩展且标准化的软件架构方案,解决传统自动驾驶软件在模块耦合、接口混乱、升级困难等方面的痛点。核心功能聚焦于定义模块间的通信规范、数据流设计、功能分层以及系统集成方式,从而提升整个自动驾驶系统的可维护性与可复用性。
标签
项目特点
**架构探索**:专注于验证新一代Autoware架构的可行性,而非完整产品。
**模块化设计**:采用高度模块化的组件划分,便于独立开发与测试。
**面向安全**:架构设计考虑了功能安全与系统可靠性要求。
**开源标准**:基于Apache-2.0许可证,代码完全开放。
**社区驱动**:由Tier IV及Autoware社区共同推动,与主流自动驾驶生态紧密关联。
**技术前瞻**:代表了Autoware未来架构演进的方向。
技术规格
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| autoware_architecture_proposal | 1 | — | 主架构提案源码包 |
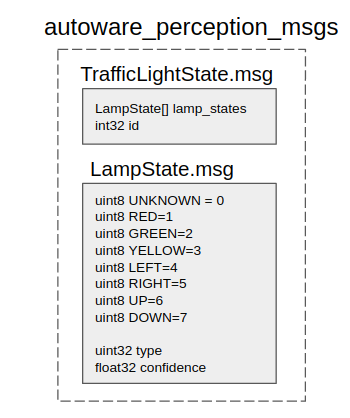
| autoware_architecture_interfaces | 1 | — | 消息与服务定义 |
| planning_node | 1 | — | 规划模块示例 |
| control_node | 1 | — | 控制模块示例 |
| perception_node | 1 | — | 感知模块示例 |
| launch文件 | 若干 | — | 系统启动配置 |
| README.md | 1 | — | 项目说明文档 |
能力画像
**记忆与知识检索**:2/5 — 项目本身不包含知识库或检索功能,但依赖Autoware生态的文档与知识体系。
**动手与操作**:3/5 — 需要具备ROS 2环境搭建、代码编译与调试的实际动手能力。
**编程与算法**:4/5 — 核心开发涉及C++编程、自动驾驶算法(规划、控制、感知)的实现与优化。
**设计与建模**:4/5 — 重点在于系统架构设计、模块划分、接口定义与数据流建模。
**实验与调试**:3/5 — 需要通过仿真或实车环境进行架构验证与性能调试。
**协作与分享**:3/5 — 开源项目,鼓励通过GitHub Issue、PR进行社区协作与代码贡献。
**学习与研究**:5/5 — 该项目本身就是一项技术研究,适合学习自动驾驶系统架构设计的前沿思路。
**系统集成**:4/5 — 需要将多个模块(感知、规划、控制)集成为一个完整的系统,并确保通信与调度正常。
项目图库
所需技能
C++ 编程
Python 编程
ROS 2 开发经验
CMake 构建系统
自动驾驶基础理论(感知、规划、控制)
系统架构设计
Git 版本控制
Linux 操作系统使用
功能安全基础知识(加分项)
适用场景
自动驾驶系统架构师的技术验证与原型开发
对Autoware下一代架构感兴趣的研究人员
希望参与Autoware社区架构讨论的开发者
高校自动驾驶相关课程的教学案例
企业进行自动驾驶软件平台选型前的技术评估
探索模块化、安全关键系统设计的软件工程师