MrRobot 机器人
MrRobot
舵机驱动板
3/5
🧩 软硬件结合
已发布

项目简介
Fusion 360设计,FlashForge Creator Pro打印,主控Raspbe。
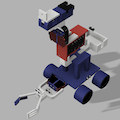
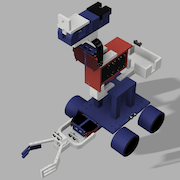
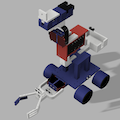
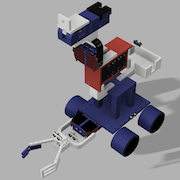
MrRobot 是一个由 Steven Smiley 发起的开源 DIY 机器人项目,旨在打造一台具备视觉识别、自主控制与远程交互能力的实体机器人。项目从零开始,完整涵盖了机械设计、电子电路、嵌入式编程与人工智能训练等多个环节,适合对机器人制作、计算机视觉和边缘计算感兴趣的开发者与爱好者学习参考。
标签
项目特点
**多控制器架构**:使用 Raspberry Pi 作为主脑,多个 Arduino 作为从机,分别控制电机、传感器和线圈炮,实现复杂任务的并行处理。
**计算机视觉与边缘 AI**:利用 TensorFlow Lite 和 Coral USB 加速器,在机器人本地运行 SSD MobileNet V2 模型进行实时物体检测。
**多种交互方式**:支持 iOS 应用远程控制、无线数据手套手势控制,以及基于视觉的自主行为。
**完整的训练流水线**:提供了从 Google Drive 获取图像、使用 LabelImg 标注、在 Google Colab 上训练模型,到在机器人上部署的完整流程。
**开源与模块化**:所有设计文件、代码和文档均开源,方便用户修改和扩展。
技术规格
| 主控制器 | Raspberry Pi (型号未指定) |
|---|---|
| 协处理器 | Arduino Uno x4 (或类似型号) |
| 3D打印材料 | PLA |
| 3D建模软件 | Autodesk Fusion 360 |
| 视觉加速器 | Coral USB Accelerator |
| 目标检测模型 | SSD MobileNet V2 FPNLite 320x320 |
| 训练平台 | Google Colab |
| 移动端应用 | iOS (Swift, Xcode) |
| 无线通信 | 蓝牙 (推测,用于手套) / Wi-Fi (推测,用于iOS应用) |
| 特殊功能 | 线圈炮 (Coil Gun) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Raspberry Pi (3B+/4B) | 1 | — | 主控制器 |
| Arduino Uno (或 Nano) | 4 | — | 分别负责接收、主控、发射、线圈炮 |
| 直流电机 (带轮子) | 2 | — | 用于驱动 |
| 舵机 (SG90/MG90S) | 若干 | — | 用于夹爪和线圈炮臂 |
| MPU6050 (六轴陀螺仪+加速度计) | 1 | — | 用于数据手套 |
| 柔性传感器 (FlexSensor) | 若干 | — | 用于数据手套 |
| Coral USB Accelerator | 1 | — | 边缘AI推理 |
| 电池组 (如18650锂电) | 1套 | — | 为树莓派和Arduino供电 |
| PLA 3D打印件 | 1套 | — | 外壳和结构 |
| 线圈炮组件 (线圈、电容、继电器) | 1套 | — | 特殊功能模块 |
| 无线模块 (nRF24L01/HC-05) | 若干 | — | 用于Arduino间通信 |
| USB线、杜邦线、面包板等 | 若干 | — | 连接和调试 |
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 4/5
⚪ 数理与计算: 4/5
⚪ 动手与操作: 5/5
⚪ 狂热与坚持: 5/5
⚪ 创造与创新: 4/5
项目图库





所需技能
🔧 **动手能力**:需要熟练使用3D打印机、焊接工具和基本机械组装技能,以完成机器人的物理构建。
💻 **编程能力**:需要掌握 Python(树莓派主控、TensorFlow)、C++(Arduino 固件)以及 Swift(iOS 应用开发)的基础知识。
⚡ **电子电路**:需要理解微控制器(树莓派、Arduino)的引脚连接、电机驱动、传感器接口以及电源管理,特别是线圈炮的高压电路部分。
适用场景
**机器人学习与研究**:作为学习机器人学、嵌入式系统、计算机视觉和边缘AI的综合性实践项目。
**DIY 创客项目**:适合有经验的创客进行二次开发、功能扩展或外观改造。
**教育与演示**:可用于展示多控制器协作、机器学习流水线和物联网应用。
**趣味娱乐**:集成了线圈炮和手势控制,可作为互动娱乐设备。