待补充
PegasusSimulator/PegasusSimulator
飞控/无人机
3/5
🧩 软硬件结合
已发布
项目简介
A framework built on top of NVIDIA Isaac Sim for simulating drones with PX4 support and much more
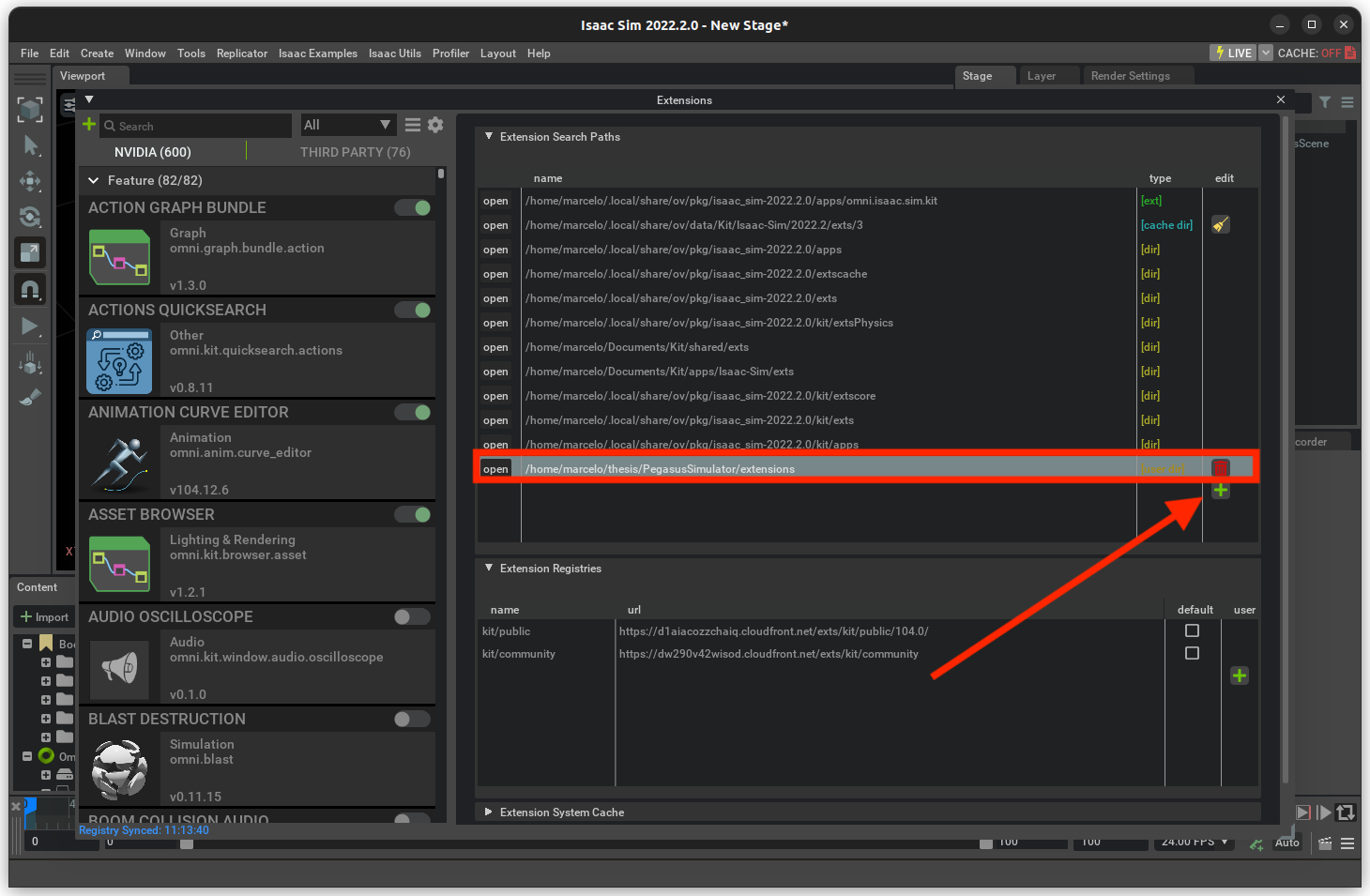
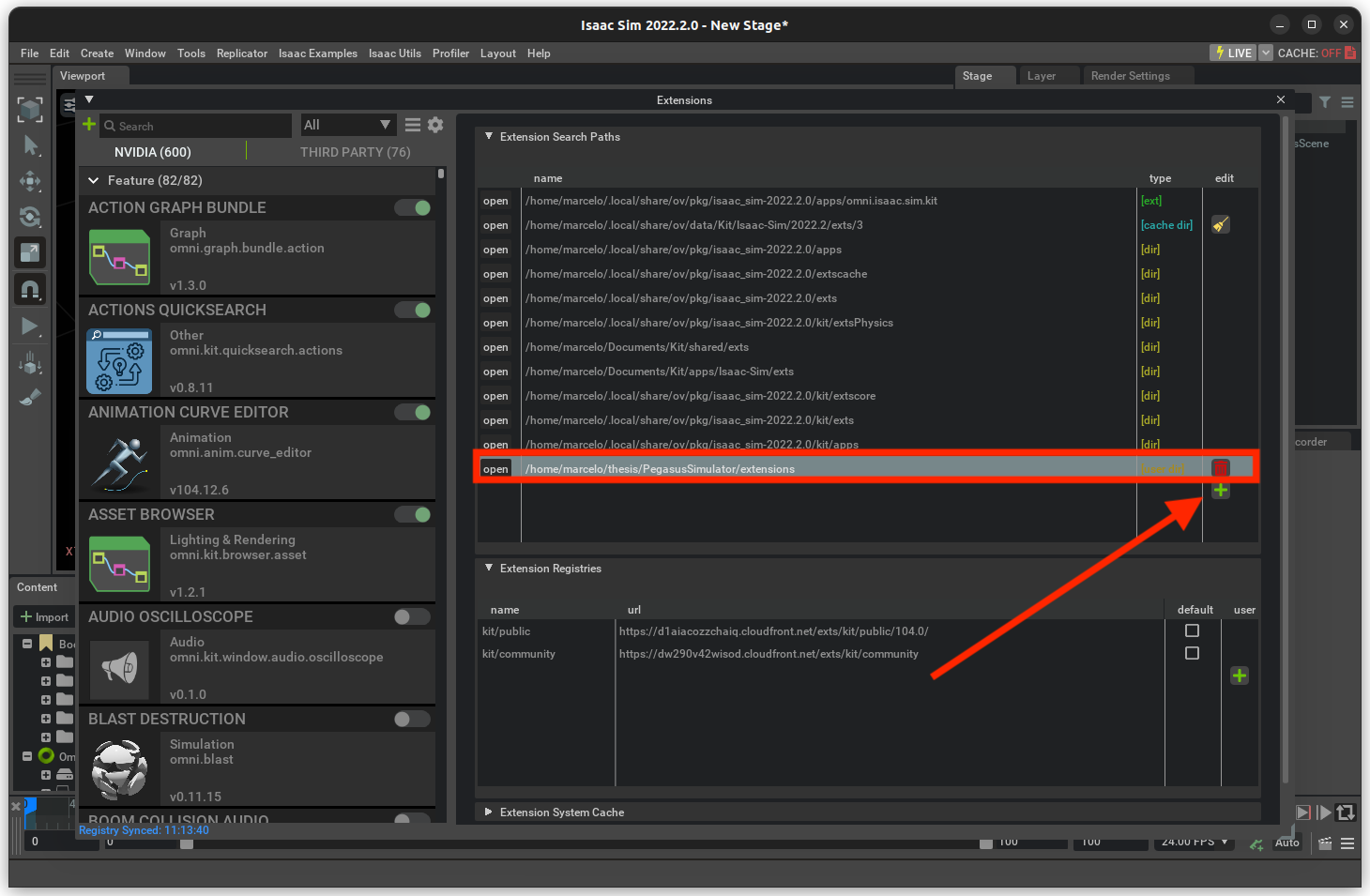
Pegasus Simulator 是一个基于 NVIDIA Omniverse 和 Isaac Sim 构建的开源无人机仿真框架,专为多旋翼飞行器的动力学模拟与控制算法验证而设计。该项目由 Marcelo Jacinto 于 2023 年发起,作为其博士研究的一部分,并计划持续维护至 2027 年。核心功能方面,Pegasus Simulator 提供了与 PX4 和 ArduPilot 两大主流飞控系统的无缝集成接口,同时支持用户通过自定义 Python 控制接口直接操控无人机。目前框架主要支持多旋翼机型,未来计划扩展至其他飞行器拓扑结构。技术栈上,项目依托 Isaac Sim 5.1.0 的物理引擎与渲染能力,运行于 Ubuntu 22.04 LTS 环境,并兼容 ROS2 通信协议。其最大特点是降低了在逼真仿真环境中部署多无人机系统的门槛——开发者无需从零搭建复杂的仿真管线,即可快速实现从单机到集群的算法测试。该框架解决了传统无人机仿真中环境真实感不足、与真实飞控硬件对接困难、多机协同场景支持薄弱等痛点。适用场景包括:无人机集群编队与避障算法开发、视觉惯性里程计与传感器融合验证、强化学习训练环境构建,以及基于 PX4/ArduPilot 的自主飞行任务规划。项目还提供了详尽的文档与视频演示,并鼓励社区贡献,已有多位开源开发者参与 ArduPilot 接口的改进与维护。
标签
项目特点
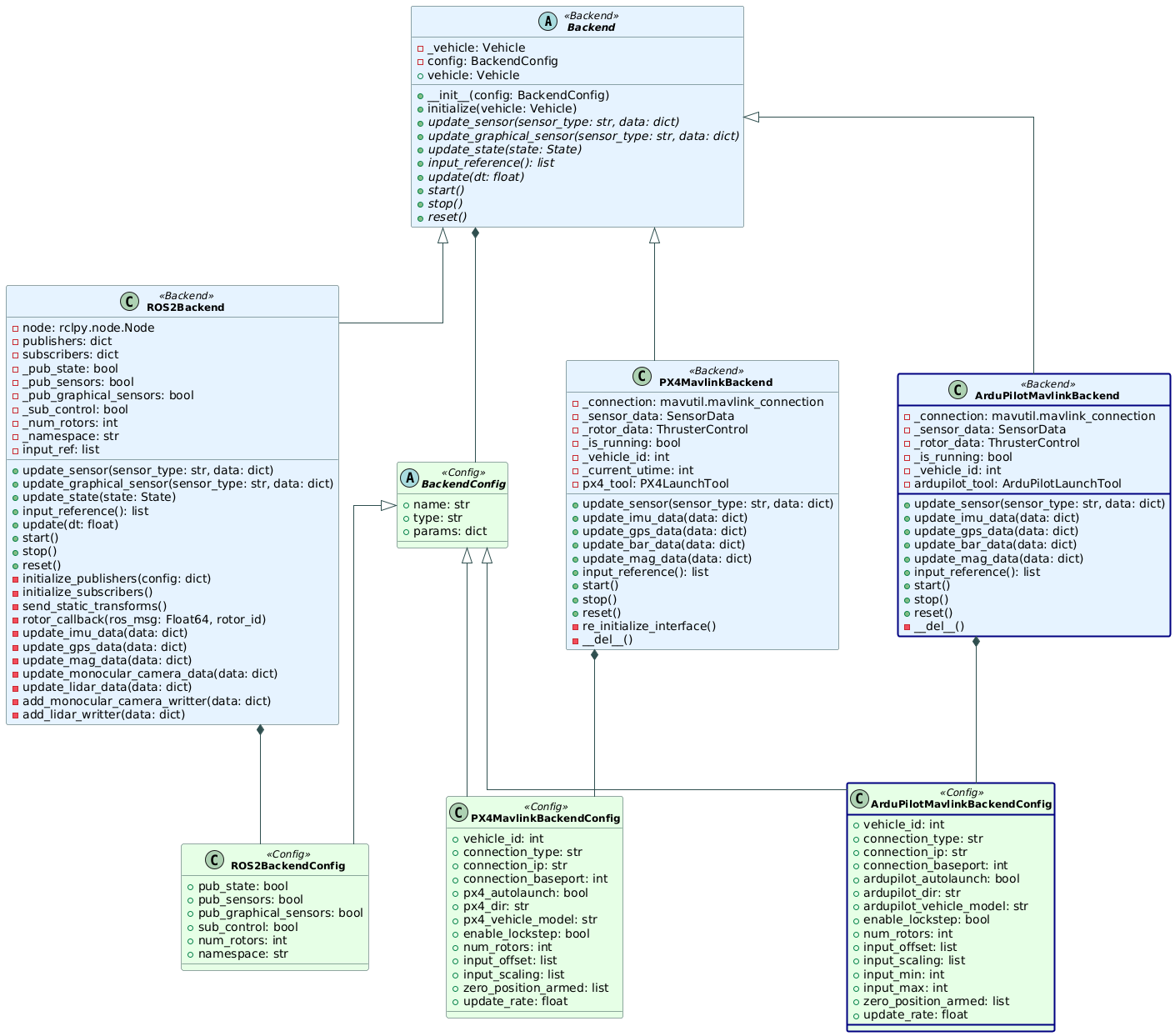
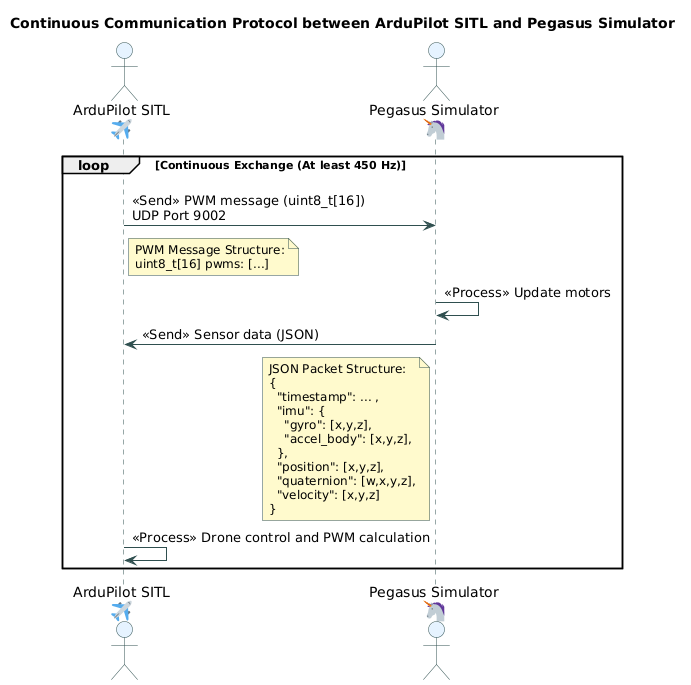
**双飞控集成**:原生支持 PX4 和 ArduPilot,通过 ROS 2 接口实现无缝对接,方便你在仿真中直接测试真实飞控代码。
**自定义 Python 控制**:提供 Python 控制接口,你可以绕过飞控直接写控制逻辑,适合快速原型验证和算法研究。
**高保真物理引擎**:基于 NVIDIA Isaac Sim 的 PhysX 物理引擎,支持刚体动力学、碰撞检测和传感器仿真,模拟效果接近真实。
**模块化架构**:动力学模型、传感器、控制器等组件均可替换和扩展,方便你针对特定机型或场景进行定制。
**多旋翼支持**:目前主要支持四旋翼、六旋翼等多旋翼构型,未来计划加入固定翼、倾转旋翼等拓扑结构。
**持续维护**:项目由学术团队维护,计划持续到 2027 年,有活跃的社区和文档支持。
技术规格
| 基础平台 | |
|---|---|
| 支持飞控 | |
| 支持机型 | |
| 编程接口 | |
| 物理引擎 | |
| 渲染引擎 | |
| 操作系统 | |
| GPU 要求 | |
| 依赖环境 | |
| 许可证 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| NVIDIA GPU (RTX 3060 或更高) | 1 | — | 运行 Isaac Sim 必需,建议 8GB+ 显存 |
| 计算机 (台式机或工作站) | 1 | — | 推荐 Intel i7/AMD Ryzen 7 或更高,32GB RAM |
| Ubuntu 20.04/22.04 | 1 | — | 操作系统 |
| NVIDIA Omniverse Launcher | 1 | — | 用于安装 Isaac Sim |
| Isaac Sim 5.1.0 | 1 | — | 核心仿真平台 |
| ROS 2 (Humble 或 Foxy) | 1 | — | 用于飞控集成 |
| Python 3.8+ | 1 | — | 编程接口 |
| PX4 Autopilot (可选) | 1 | — | 如需测试 PX4 飞控 |
| ArduPilot (可选) | 1 | — | 如需测试 ArduPilot 飞控 |
能力画像
**记忆与知识检索**:3/5 — 项目文档和示例较完善,但部分高级功能需要查阅论文和社区讨论。
**动手与操作**:4/5 — 安装和配置依赖较多,需要一定的 Linux 和 GPU 驱动经验,但官方提供了详细步骤。
**编程与算法**:4/5 — 需要 Python 和 ROS 2 基础,编写控制算法和扩展模块有一定门槛。
**设计与建模**:3/5 — 支持自定义无人机模型和动力学,但需要熟悉 Isaac Sim 的建模工具。
**实验与调试**:4/5 — 仿真环境支持实时调试和可视化,日志和传感器数据便于分析。
**协作与分享**:3/5 — 开源社区活跃,但协作工具(如 Issue、PR)使用频率中等。
**学习与研究**:5/5 — 非常适合无人机控制、动力学和 SLAM 等方向的研究,有论文支撑。
**系统集成**:4/5 — 能无缝对接 PX4/ArduPilot 和 ROS 2,但集成到其他系统需要额外工作。
项目图库




所需技能
Linux 系统基础操作(Ubuntu 环境)
Python 编程(面向对象、ROS 2 节点编写)
ROS 2 基础(话题、服务、动作通信)
无人机基础知识(多旋翼动力学、飞控原理)
NVIDIA GPU 驱动安装与 CUDA 环境配置
Git 版本控制
基本仿真概念(物理引擎、传感器模型)
(可选)PX4 或 ArduPilot 使用经验
(可选)计算机视觉或 SLAM 知识
适用场景
无人机控制算法研究与验证(PID、MPC、强化学习等)
多旋翼飞行器动力学建模与仿真
飞控固件(PX4/ArduPilot)的硬件在环测试
无人机集群协同控制算法开发
无人机传感器仿真(IMU、GPS、相机、激光雷达)
无人机避障与路径规划算法测试
学术论文实验复现与对比
无人机相关课程教学与实验平台