MapTR - 端到端矢量化高清地图构建框架
MapTR
3/5
🧩 软硬件结合
已发布

项目简介
[ICLR'23 Spotlight & ECCV'24 & IJCV'24] MapTR: Structured Modeling and Learning for Online Vectorized HD Map Constructio
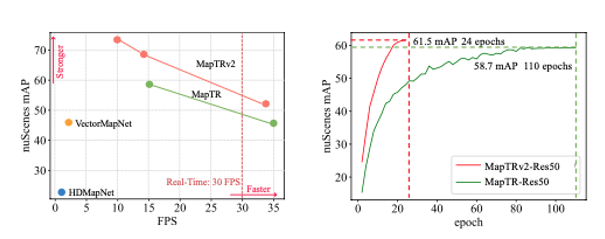
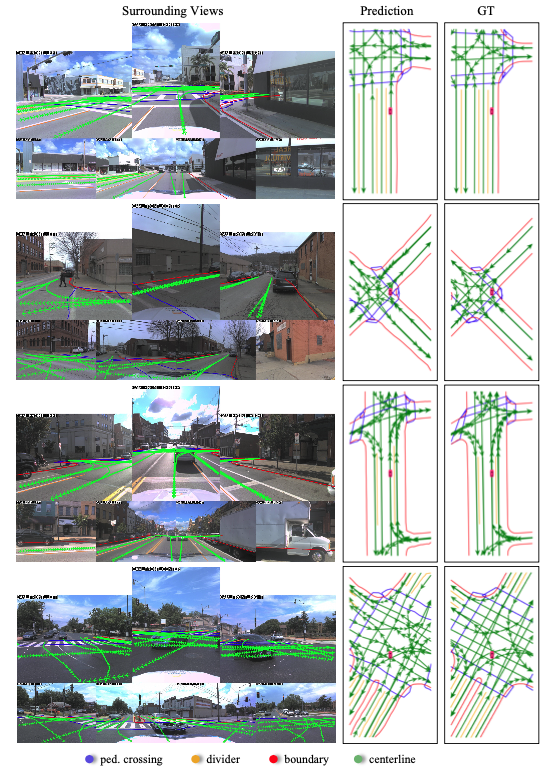
MapTR是一个面向自动驾驶场景的在线矢量化高精地图构建框架,由华中科技大学与地平线联合研发,相关论文已被ICLR 2023接收为Spotlight,并进一步扩展至IJCV 2024。该项目核心解决的是传统高精地图构建依赖离线标注、更新成本高且难以实时适应动态环境的问题。MapTR提出了一种端到端的Transformer架构,能够直接从多视角车载摄像头图像中在线生成矢量化地图元素,包括车道线、人行横道、道路边界等。其关键技术在于统一置换等价建模方法,将地图元素视为具有一组等价排列的点集,从而准确描述任意形状的地图元素并稳定学习过程。同时,项目设计了层次化查询嵌入方案来灵活编码结构化地图信息,并采用层次化二分匹配进行地图元素学习。为了加速收敛,MapTR还引入了辅助的一对多匹配和密集监督机制。在技术栈方面,项目基于PyTorch和MMDetection3D框架实现,支持ResNet-18、ResNet-50等多种骨干网络,并兼容BEVFormer、BEVFusion等多种BEV编码器。实验结果表明,MapTR在nuScenes和Argoverse2数据集上均达到了当时最先进的性能,其中MapTRv2版本在ResNet-50骨干网络下mAP达到68.7%,推理速度可达14.1 FPS。该框架适用于需要实时高精地图更新的自动驾驶系统,尤其适合城市复杂道路场景下的路径规划和决策模块,能够有效降低对预采集高精地图的依赖,提升系统的泛化能力和鲁棒性。
标签
项目特点
**端到端框架**:直接从多视角图像输入生成矢量化高清地图,无需中间步骤
**排列等价建模**:将地图元素建模为点集,支持任意形状的地图元素
**层次化查询嵌入**:灵活编码结构化地图信息,实现高效学习
**实时推理速度**:在RTX3090上可达35 FPS(MapTR-nano)
**多模态支持**:支持相机和LiDAR融合输入
**多种BEV编码器**:支持GKT、BEVFormer、BEVFusion等多种BEV编码器
**时间建模**:支持时序信息融合,提升地图构建稳定性
**中心线检测**:MapTRv2引入中心线语义,支持路径级建模
技术规格
| 输入 | 多视角相机图像(6视图) |
|---|---|
| 输出 | 矢量化高清地图元素(车道线、人行道、路沿等) |
| 骨干网络 | ResNet-18/50, V2-99 |
| BEV编码器 | GKT, BEVFormer, BEVFusion |
| 训练数据集 | nuScenes, Argoverse2 |
| 推理速度 | 9.9-35 FPS(取决于模型配置) |
| 硬件要求 | 8×NVIDIA RTX 3090 GPU(训练) |
| 框架 | PyTorch + MMDetection3D https://raw.githubusercontent.com/hustvl/MapTR/main/docs/install.md3 Spotlight, ECCV'24, https://raw.githubusercontent.com/hustvl/MapTR/main/docs/prepare_dataset.mdGitHub仓库](https://github.https://raw.https://raw.githubusercontent.com/hustvl/MapTR/main/docs/install.md)hustvl/MapTR/mhttps://raw.githubusercontent.com/hustvl/MapTR/main/docs/prepare_dataset.md)- [MapTR论文 (arhtthttps://raw.githubusercontent.com/hustvl/MapTR/main/docs/train_eval.md).com/hustvl/MapTRhttps://raw.githubusercontent.com/hustvl/MapTR/main/docs/visualization.md)s://arxiv.org/abs/2208.14437) -- MapTR原始论文 |
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| NVIDIA RTX 3090 GPU | 8 | — | 训练所需,推理单卡即可 |
| 高性能CPU | 1 | — | 数据加载和处理 |
| 大容量内存 | ≥64GB | — | 训练时数据加载 |
| Ubuntu 20.04+ | 1 | — | 推荐操作系统 |
| Python 3.8+ | 1 | — | 编程语言 |
| PyTorch 1.10+ | 1 | — | 深度学习框架 |
| MMDetection3D | 1 | — | 3D检测工具箱 |
| nuScenes数据集 | 1 | — | 主要训练数据集 |
| Argoverse2数据集 | 1 | — | 可选训练数据集 |
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 4/5
🔵 数理与计算: 5/5
⚪ 动手与操作: 1/5
⚪ 狂热与坚持: 3/5
⚪ 创造与创新: 4/5
项目图库

视频
所需技能
🔧 **动手能力**:需要配置深度学习环境,安装CUDA、PyTorch等依赖,管理数据集
💻 **编程能力**:需要掌握Python编程,熟悉PyTorch框架,理解Transformer架构和注意力机制
⚡ **电子电路**:不需要
适用场景
**自动驾驶系统**:为自动驾驶车辆提供实时高清地图构建能力
**机器人导航**:为移动机器人提供环境地图构建
**智能交通系统**:用于交通场景理解和地图更新
**学术研究**:作为端到端地图构建的基准方法,可用于相关研究
**地图标注工具**:基于MapTR的VMA框架可用于自动化地图标注