通用自主航空系统
GAAS
飞控/无人机
3/5
🧩 软硬件结合
已发布

项目简介
GAAS is an open-source program designed for fully autonomous VTOL(a.k.a flying cars) and drones. GAAS stands for General
GAAS(Generalized Autonomy Aviation System)是一个面向L5级全自主飞行汽车和无人机的开源框架,旨在通过引入激光雷达作为核心传感器,推动飞行器实现真正可靠的自主飞行。该项目始于2016年,最初由两位学生作为业余项目发起,2019年正式开源,目标是加速人类对天空的利用,让载人级飞行器能够像地面自动驾驶一样安全、高效地运行。
标签
项目特点
**基于激光雷达的鲁棒自主飞行**:采用激光雷达作为主传感器,克服了纯视觉算法在夜间、过曝或高速飞行时鲁棒性不足的问题,适用于载人飞行场景。
**L5级全自主飞行目标**:旨在实现完全自主的飞行汽车和大型货运无人机,可结合国家空域交通管制。
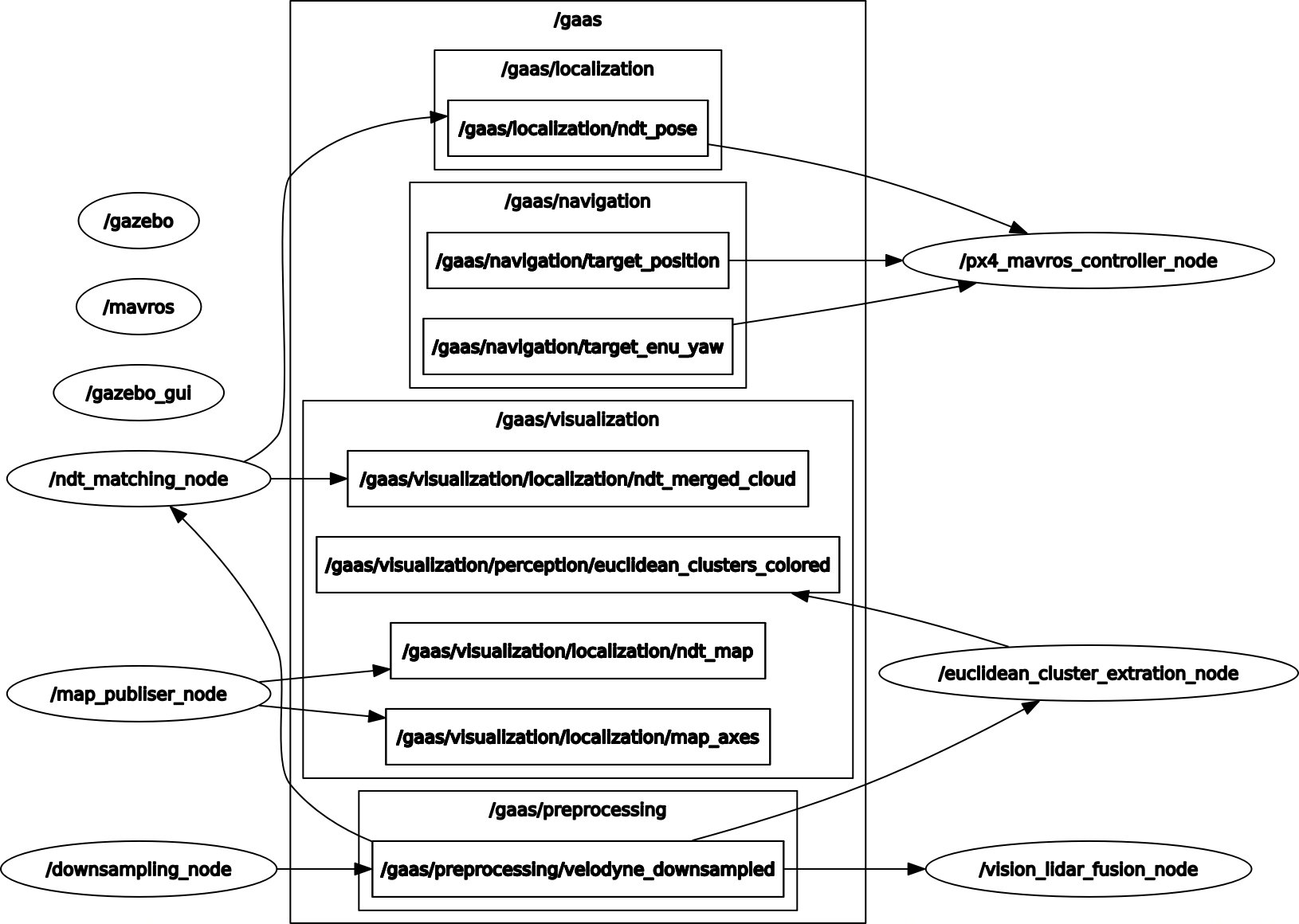
**松耦合模块化架构**:框架各模块(如定位、规划、控制)松耦合,方便用户自定义和替换。
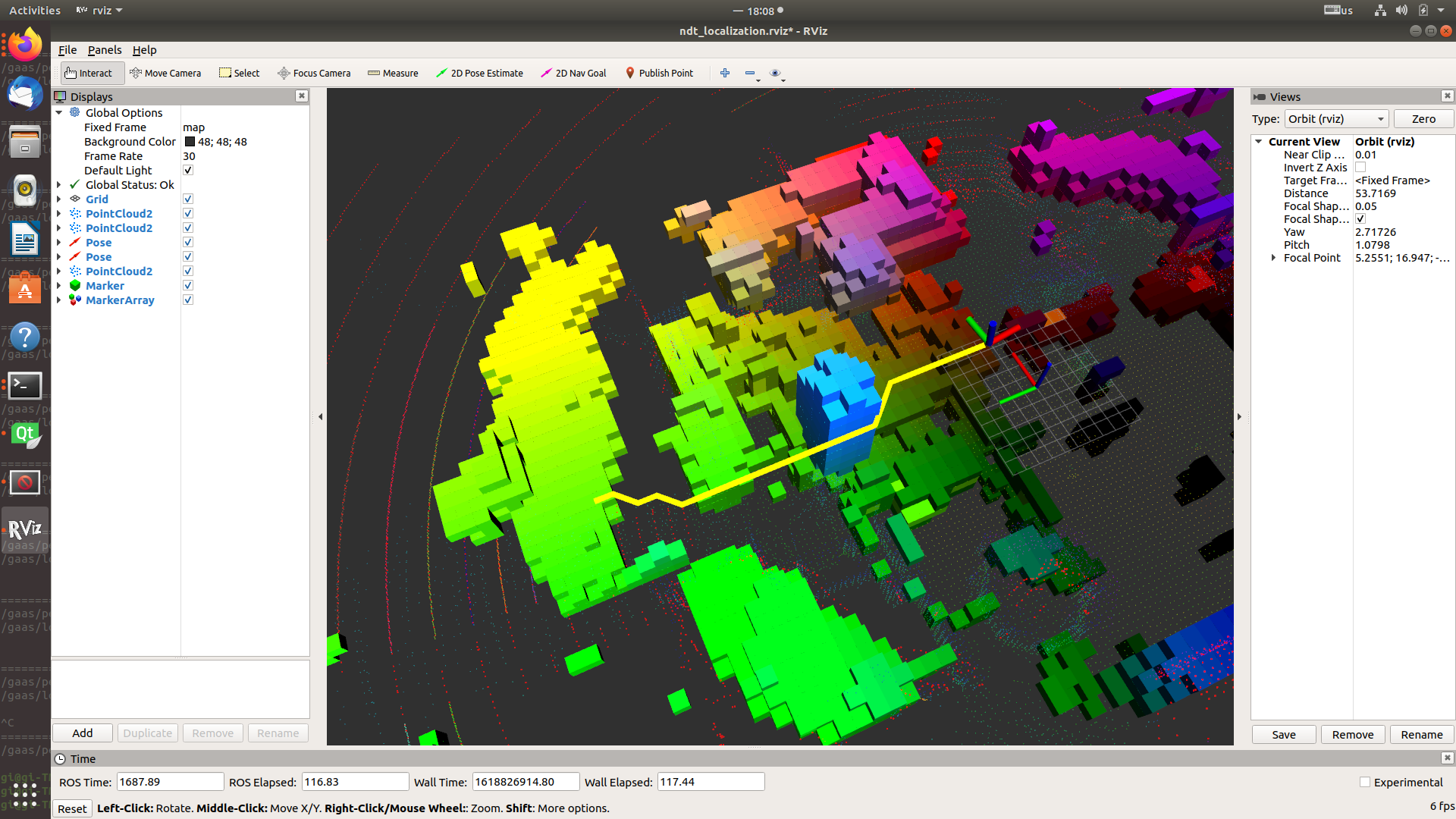
**集成多种先进算法**:包含NDT/ICP激光雷达定位、A*路径规划、动态障碍物生成与重规划、IMU预积分高频定位等。
**支持多种仿真环境**:提供基于Gazebo和AirSim的仿真环境,支持32线激光雷达和立体相机。
**支持Jetson AGX Xavier**:可在嵌入式边缘计算平台上运行。
技术规格
| 操作系统 | Ubuntu 18.04 |
|---|---|
| 飞行控制器固件 | PX4 1.8.0(仅用于仿真) |
| ROS版本 | Melodic |
| 主要传感器 | 激光雷达(机械式/固态)、立体相机 |
| 编程语言 | C++ |
| 关键依赖 | OpenCV 3.4.5, PCL 1.8.0, glog, CUDA 10.2(可选) |
| 仿真环境 | Gazebo, AirSim |
| 硬件平台 | Jetson AGX Xavier |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Jetson AGX Xavier | 1 | — | 可选,用于边缘部署 |
| 机械式/固态激光雷达 | 1 | — | 如Velodyne HDL-32或Livox Horizon |
| 立体相机 | 1 | — | 前向立体相机 |
| PX4兼容飞控 | 1 | — | 如Pixhawk |
| 垂直起降飞行器机架 | 1 | — | 需支持VTOL |
| 高容量锂电池 | 1 | — | 根据飞行器规格 |
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 3/5
⚪ 数理与计算: 5/5
⚪ 动手与操作: 4/5
⚪ 狂热与坚持: 5/5
⚪ 创造与创新: 4/5
项目图库


视频
所需技能
🔧 **动手能力**:需要组装和调试飞行器机架、传感器和飞控硬件,具备基本的机械和电子装配能力。
💻 **编程能力**:需要精通C++和ROS,熟悉Linux系统,能够编译和调试大型项目,了解CUDA编程(可选)。
⚡ **电子电路**:需要了解飞控、传感器(激光雷达、相机)的接线和通信协议,具备基本的电路调试能力。
适用场景
全自主飞行汽车(VTOL)的研发和测试
大型货运无人机的自主导航和避障
高鲁棒性要求的空中巡检和测绘任务
自动驾驶技术在航空领域的学术研究和教学
基于激光雷达的无人机自主飞行算法验证