IMU性能分析工具
imu_utils
机器人
3/5
🧩 软硬件结合
已发布

项目简介
A ROS package tool to analyze the IMU performance.
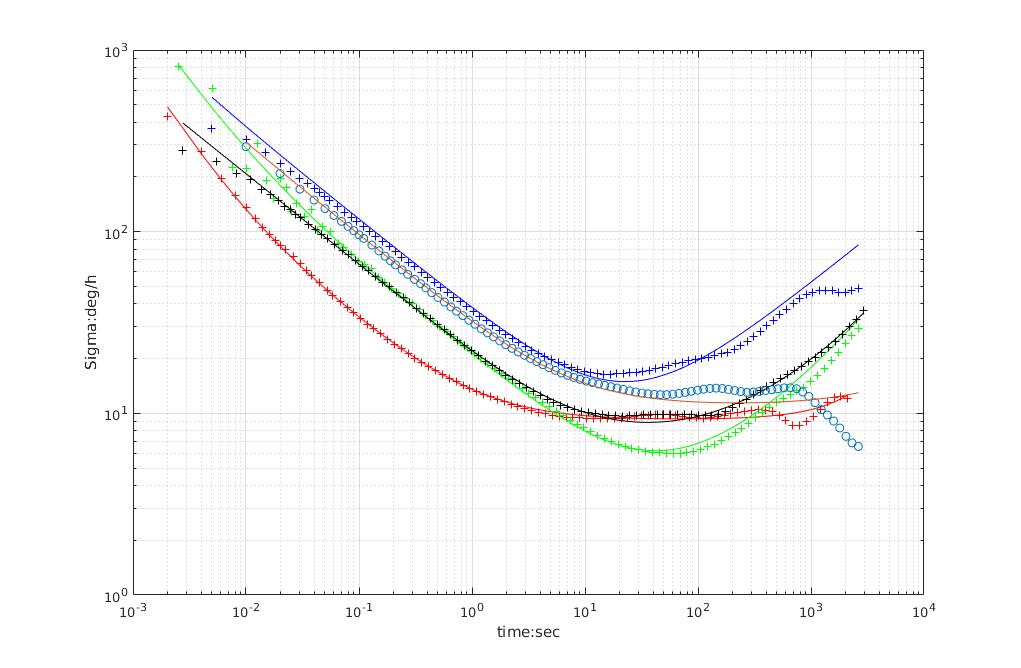
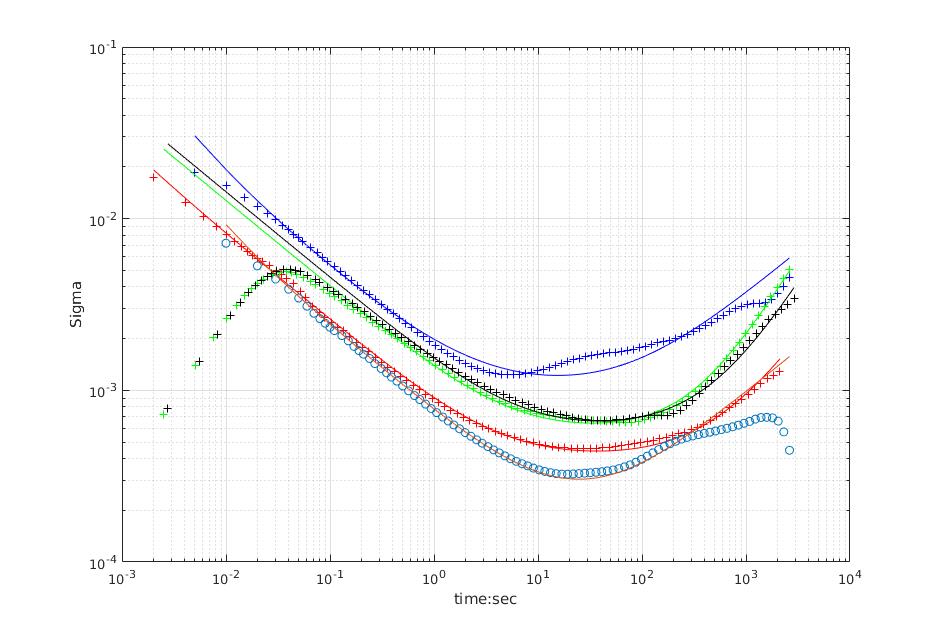
imu_utils 是一个专为惯性测量单元(IMU)性能分析设计的开源 ROS 工具包,其核心功能是基于 Allan 方差法对 IMU 数据进行噪声建模与参数标定。该项目采用 C++ 实现 Allan 方差计算,并配合 Matlab 脚本完成可视化绘图,技术栈覆盖 ROS 通信框架、C++ 数值计算与 Matlab 数据处理。
标签
项目特点
基于ROS框架,易于集成到机器人系统中
实现Allan方差分析算法,可准确评估IMU噪声性能
支持多款主流IMU(如ADIS16448、3dm-Gx4、DJI A3/N3、xsens-MTI-100)
输出详细的噪声参数,包括各轴独立和平均结果
提供Matlab绘图脚本,方便可视化分析结果
支持从rosbag回放数据进行分析
技术规格
| 开发语言 | C++ |
|---|---|
| 依赖框架 | ROS (Robot Operating System) |
| 额外依赖 | libdw-dev |
| 分析算法 | Allan方差分析 |
| 数据采集要求 | IMU静止,至少2小时 |
| 输出格式 | YAML |
| 可视化工具 | Matlab (scripts目录) |
| 支持IMU类型 | ADIS16448, 3dm-Gx4, DJI A3, DJI N3, xsens-MTI-100等 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| IMU传感器 | 1 | — | 待测试的IMU设备 |
| 计算机 | 1 | — | 运行ROS和imu_utils |
| ROS (Kinetic/Melodic/Noetic) | 1 | — | 机器人操作系统 |
| libdw-dev | 1 | — | 系统依赖库 |
| Matlab | 1 | — | 可选,用于绘图 |
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 1/5
🔵 数理与计算: 4/5
🔵 动手与操作: 3/5
⚪ 狂热与坚持: 2/5
⚪ 创造与创新: 2/5
项目图库
所需技能
🔧 **动手能力**:需要搭建ROS工作环境,连接IMU硬件并采集数据,或使用已有的rosbag数据
💻 **编程能力**:需要了解ROS基本操作(launch文件、rosbag命令),C++编译基础
⚡ **电子电路**:了解IMU传感器基本工作原理和接口
适用场景
机器人IMU传感器选型评估和性能对比
惯性导航系统开发中的IMU噪声建模
多传感器融合定位系统中的IMU参数标定
无人机、自动驾驶等领域的IMU性能测试
学术研究中IMU噪声特性分析