超快速车道线检测
Ultra-Fast-Lane-Detection
3/5
🧩 软硬件结合
已发布
项目简介
Ultra Fast Structure-aware Deep Lane Detection (ECCV 2020)
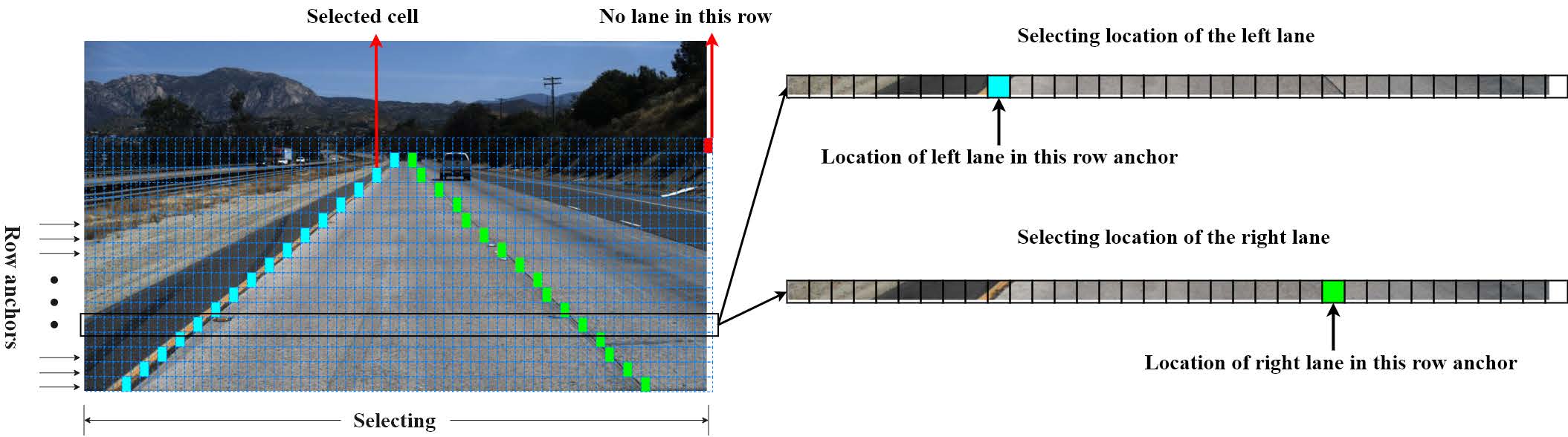
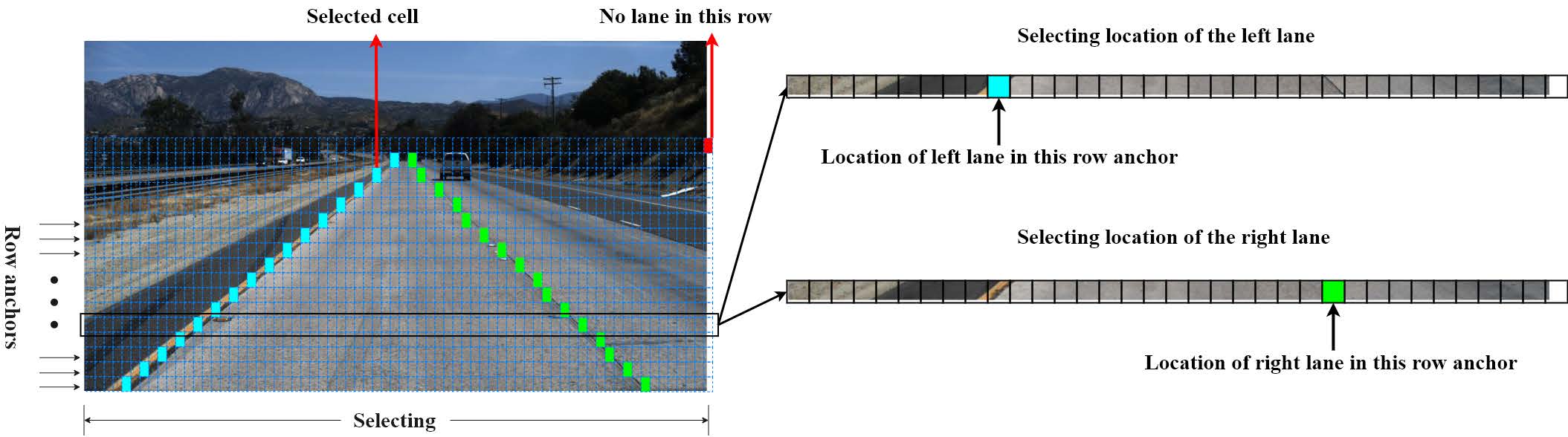
Ultra-Fast-Lane-Detection 是一个基于 PyTorch 实现的高性能车道线检测开源项目,对应 ECCV 2020 论文《Ultra Fast Structure-aware Deep Lane Detection》。该项目的核心创新在于提出了一种结构感知的超快速车道线检测方法,将传统的逐像素分割任务转化为基于行方向分类的轻量级问题,从而大幅降低了计算复杂度。在技术栈方面,项目采用 ResNet-18 作为骨干网络,支持单 GPU 和多 GPU 训练与评估,并提供了完整的训练、测试、可视化及速度测试脚本。在主流数据集上,该项目在 Tusimple 上达到 95.82% 的准确率,在 CULane 上达到 69.7% 的 F1 分数,同时在 GTX 1080Ti 上推理速度超过 300 FPS,实现了精度与速度的出色平衡。项目解决了传统车道线检测方法(如基于分割的 SCNN)计算量大、实时性差的问题,特别适用于自动驾驶、高级驾驶辅助系统(ADAS)等对实时性要求极高的场景。此外,项目还提供了预训练模型、详细的安装指南和配置说明,方便开发者快速部署和二次开发。2022 年,该方法的增强版本已被 TPAMI 接收,进一步提升了在 CULane 上的 F1 分数,展现了持续的技术演进能力。
标签
项目特点
极速推理:在 GTX 1080Ti 上 CULane 数据集可达 324 FPS,Tusimple 数据集可达 306 FPS。
结构感知:利用车道线的结构先验信息提升检测精度和鲁棒性。
多数据集支持:内置 CULane 和 Tusimple 数据集的配置与评估代码。
完整工具链:提供训练、测试、可视化、速度测试等全套脚本。
多 GPU 支持:支持分布式训练与多卡评估。
预训练模型:提供在 CULane 和 Tusimple 上训练好的 ResNet-18 模型权重。
技术规格
| 论文来源 | ECCV 2020 / TPAMI 2022 |
|---|---|
| 框架 | PyTorch |
| 骨干网络 | ResNet-18 |
| 支持数据集 | CULane, Tusimple |
| 推理速度 (Tusimple) | 306 FPS (GTX 1080Ti) |
| 推理速度 (CULane) | 324 FPS (GTX 1080Ti) |
| Tusimple 精度 (论文) | 95.87% |
| Tusimple 精度 (本仓库) | 95.82% |
| CULane 精度 (论文) | 68.4% F1 |
| CULane 精度 (本仓库) | 69.7% F1 |
| 训练方式 | 单卡 / 多卡分布式 |
| 日志工具 | TensorBoard |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Python 3.x | 1 | — | 开发环境 |
| PyTorch | 1 | — | 深度学习框架 |
| CUDA | 1 | — | GPU 加速 |
| TensorBoard | 1 | — | 日志可视化 |
| CULane 或 Tusimple | 1 | — | 训练与评估数据 |
| GPU (推荐 GTX 1080Ti 或更高) | 1 | — | 训练与推理 |
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 1/5
🔵 数理与计算: 4/5
🔵 动手与操作: 3/5
⚪ 狂热与坚持: 2/5
🔵 创造与创新: 4/5
项目图库
视频
所需技能
🔧 **动手能力**:需要配置深度学习环境(CUDA、PyTorch),下载并组织数据集(CULane/Tusimple),运行训练和测试脚本。
💻 **编程能力**:需要 Python 基础,熟悉 PyTorch 框架,能够修改配置文件(configs/culane.py 或 configs/tusimple.py)和命令行参数。
⚡ **电子电路**:无需硬件电路知识。
适用场景
自动驾驶车道线检测算法研究与复现
实时车道线检测系统开发与部署
深度学习在结构化道路感知中的应用实验
车道线检测竞赛或基准测试