待补充
newton
机器人
3/5
🧩 软硬件结合
已发布
项目简介
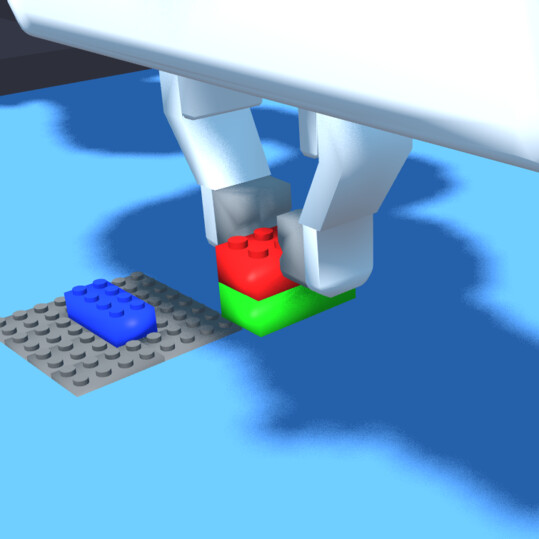
An open-source, GPU-accelerated physics simulation engine built upon NVIDIA Warp, specifically targeting roboticists and
Newton 是一个基于 NVIDIA Warp 构建的 GPU 加速物理仿真引擎,专为机器人学家和仿真研究人员设计。该项目由迪士尼研究院、Google DeepMind 和 NVIDIA 联合发起,目前是 Linux 基金会旗下的社区维护项目,采用 Apache-2.0 许可证。
标签
项目特点
**GPU 加速**:利用 NVIDIA Warp 在 GPU 上并行计算,大幅提升物理仿真速度。
**支持多种物理模型**:涵盖刚体、软体、流体、布料、铰链约束等常见物理系统。
**与机器人生态集成**:可直接与 ROS、PyTorch、Isaac Sim 等工具链配合使用。
**Python 原生接口**:所有功能通过 Python API 调用,降低使用门槛。
**可微分物理**:支持自动微分,可用于强化学习、控制优化等 AI 训练场景。
**开源可扩展**:基于 MIT 许可证,允许自由修改和商用。
技术规格
| 编程语言 | |
|---|---|
| 依赖框架 | |
| 支持 GPU | |
| 支持物理类型 | |
| 求解器类型 | |
| 最大粒子数 | |
| 时间步长 | |
| 操作系统 | |
| Python 版本 | |
| 许可证 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Python | 1 | — | 版本 3.8+ |
| NVIDIA Warp | 1 | — | 版本 >=0.10.0 |
| CUDA Toolkit | 1 | — | 可选,用于编译自定义内核 |
| NVIDIA GPU | 1 | — | Compute Capability 7.0+ |
| 内存 | 1 | — | 建议 16GB+ |
| 示例脚本 | 若干 | — | 位于 examples/ 目录 |
| 单元测试 | 1套 | — | 位于 tests/ 目录 |
能力画像
**记忆与知识检索**:2/5 — 项目本身不涉及知识库或检索功能,但文档和示例可作为参考。
**动手与操作**:3/5 — 需要配置 GPU 环境和安装依赖,有一定操作门槛。
**编程与算法**:4/5 — 核心是 Python 编程和物理算法理解,需编写或修改仿真脚本。
**设计与建模**:3/5 — 支持自定义物理场景和物体模型,但建模能力取决于用户对物理引擎的理解。
**实验与调试**:4/5 — 提供丰富的示例和可视化工具,便于调试和验证物理效果。
**协作与分享**:3/5 — 开源社区支持,可通过 GitHub 提交 Issue 和 PR 协作。
**学习与研究**:5/5 — 非常适合物理仿真、机器人控制、强化学习等方向的研究与学习。
**系统集成**:4/5 — 可与 PyTorch、ROS、Isaac Sim 等主流工具链集成,扩展性强。
项目图库






所需技能
Python 编程基础
基本的物理仿真概念(刚体、碰撞、约束)
熟悉 GPU 计算和 CUDA 环境配置
了解机器人学或强化学习(可选,用于特定场景)
使用 Git 进行版本管理(可选)
适用场景
机器人运动规划与控制仿真
强化学习训练环境(如抓取、行走、操控)
物理现象教学与可视化演示
游戏或影视中的物理特效原型开发
工业自动化中的碰撞检测与路径优化
学术研究中的可微分物理与最优控制