自动驾驶菜谱
AutonomousDrivingCookbook
机器人
5/5
🧩 软硬件结合
已发布

项目简介
Scenarios, tutorials and demos for Autonomous Driving
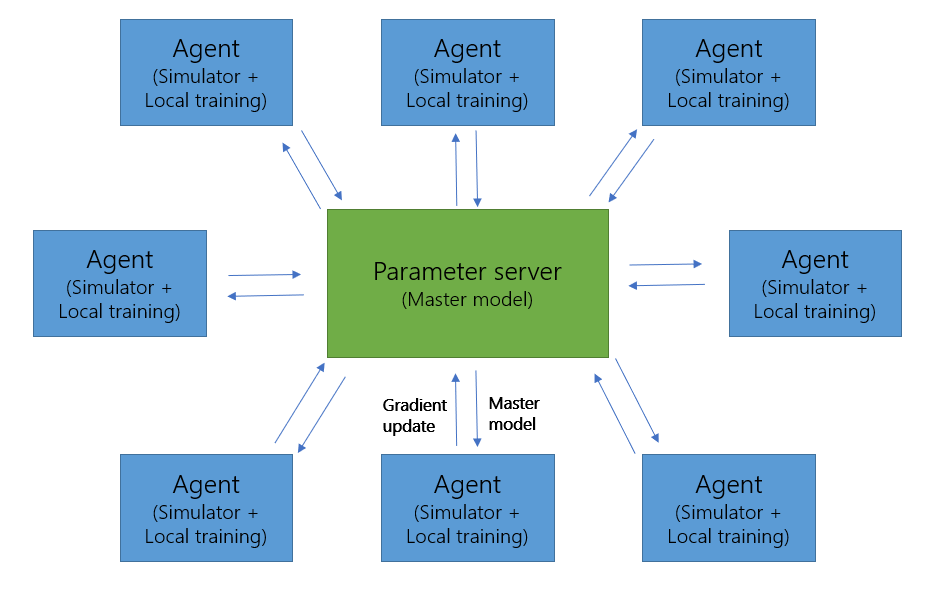
「AutonomousDrivingCookbook」是由微软车库(Microsoft Garage)旗下Project Road Runner团队开发的开源项目,旨在降低自动驾驶技术的入门门槛,让开发者、研究人员和爱好者都能快速上手实践。项目以Jupyter Notebook形式提供教程,目前包含两大核心模块:基于端到端深度学习的自动驾驶(使用AirSim模拟器)和分布式深度强化学习自动驾驶。技术栈涵盖Keras、TensorFlow、CNTK等主流框架,并深度整合微软Azure云服务(如虚拟机、Batch AI)与AirSim高保真模拟器。
标签
项目特点
**基于AirSim仿真**:所有实验都在微软的AirSim高保真模拟器中进行,无需真实车辆即可安全测试算法。
**模块化教程**:从数据采集、模型训练到部署验证,每个环节都有独立的Notebook,方便按需学习。
**端到端驾驶示例**:提供了完整的端到端深度学习驾驶方案,包括数据生成、模型训练和仿真测试。
**计算机视觉应用**:包含车道线检测、物体识别等经典视觉任务的实现代码。
**强化学习支持**:集成了强化学习算法用于自动驾驶决策控制,适合进阶研究。
**跨平台兼容**:支持Windows和Linux系统,与主流深度学习框架(PyTorch、TensorFlow)无缝对接。
技术规格
| 仿真环境 | |
|---|---|
| 编程语言 | |
| 深度学习框架 | |
| 主要依赖 | |
| 操作系统 | |
| 硬件要求 | |
| 数据集格式 | |
| 模型架构 | |
| 控制接口 | |
| 项目规模 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Microsoft AirSim | 1 | — | 仿真环境,需单独安装 |
| Python 3.6+ | 1 | — | 运行环境 |
| PyTorch 或 TensorFlow | 1 | — | 深度学习框架,二选一 |
| Jupyter Notebook | 1 | — | 教程运行环境 |
| NumPy | 1 | — | 数值计算库 |
| OpenCV | 1 | — | 图像处理库 |
| Matplotlib | 1 | — | 数据可视化 |
| NVIDIA GPU | 1 | — | 建议GTX 1060以上 |
| 内存 | 8GB+ | — | 运行仿真和训练 |
| 硬盘空间 | 20GB+ | — | 存储数据和模型 |
能力画像
**记忆与知识检索**: 2/5 — 项目本身不涉及知识库或检索系统,但教程文档清晰,便于查阅。
**动手与操作**: 4/5 — 需要安装AirSim、配置环境、运行仿真,动手操作环节较多。
**编程与算法**: 4/5 — 涉及深度学习模型训练、图像处理、控制算法,需要Python编程基础。
**设计与建模**: 3/5 — 提供了现成模型架构,但鼓励用户修改和设计自己的网络。
**实验与调试**: 5/5 — 每个教程都是完整的实验流程,包含数据采集、训练、测试和调优。
**协作与分享**: 3/5 — 开源项目,支持PR和Issue,但协作流程相对简单。
**学习与研究**: 5/5 — 非常适合自动驾驶入门学习和算法研究,教程由浅入深。
**系统集成**: 3/5 — 需要将AirSim、深度学习框架、控制代码集成在一起,有一定系统整合要求。
项目图库





所需技能
Python编程基础
深度学习基础(CNN、强化学习概念)
计算机视觉基础(图像处理、特征提取)
基本Linux/Windows命令行操作
Git版本控制基础
自动驾驶基础知识(车辆动力学、控制理论)
适用场景
高校自动驾驶课程的教学实验
个人学习自动驾驶技术的入门项目
端到端驾驶算法的快速原型验证
计算机视觉在自动驾驶中的应用研究
强化学习在决策控制中的实验平台
自动驾驶算法竞赛的本地测试环境
企业新员工自动驾驶技术培训