LaneNet 车道线检测
lanenet-lane-detection
3/5
🧩 软硬件结合
已发布
项目简介
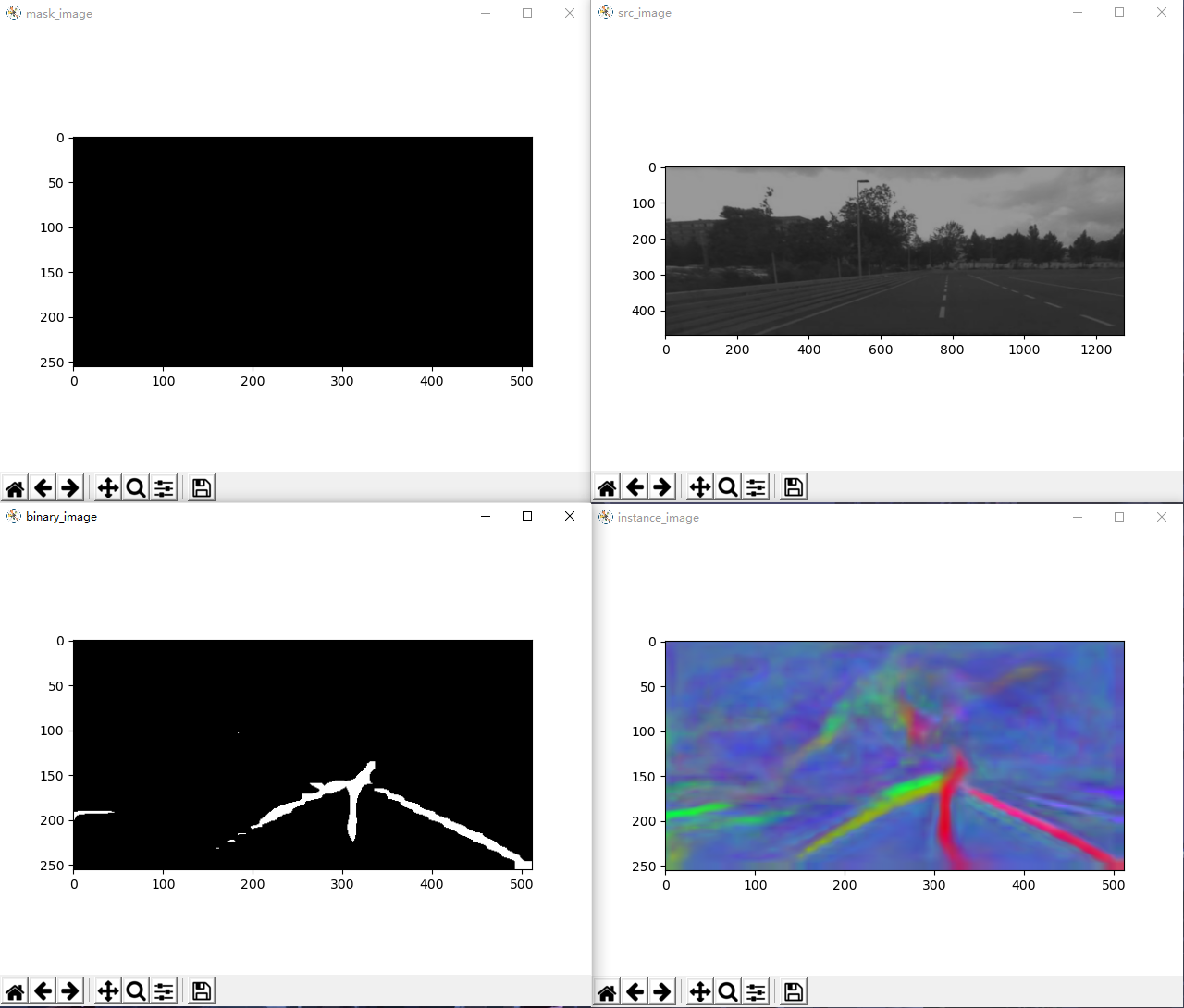
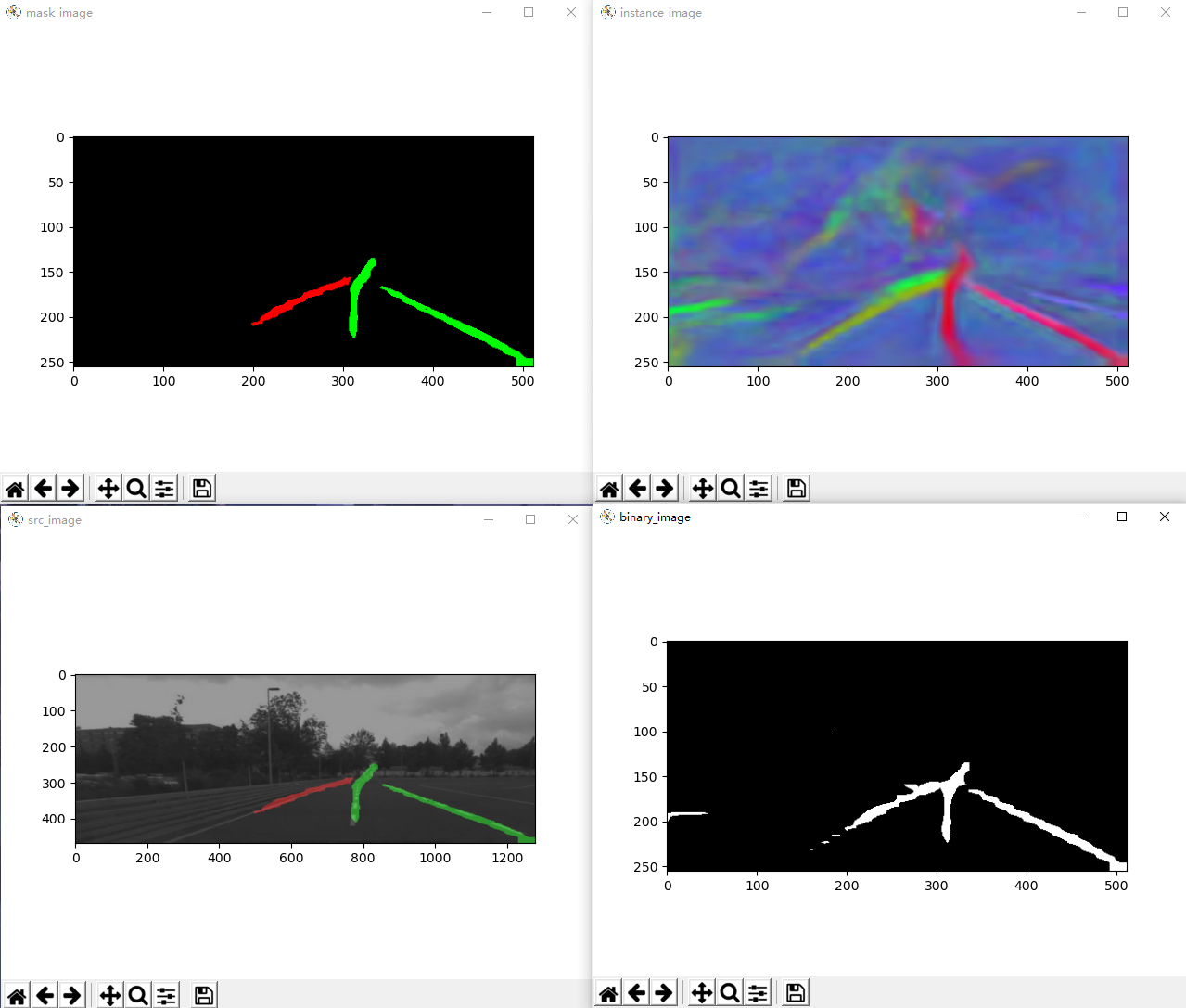
Unofficial implemention of lanenet model for real time lane detection
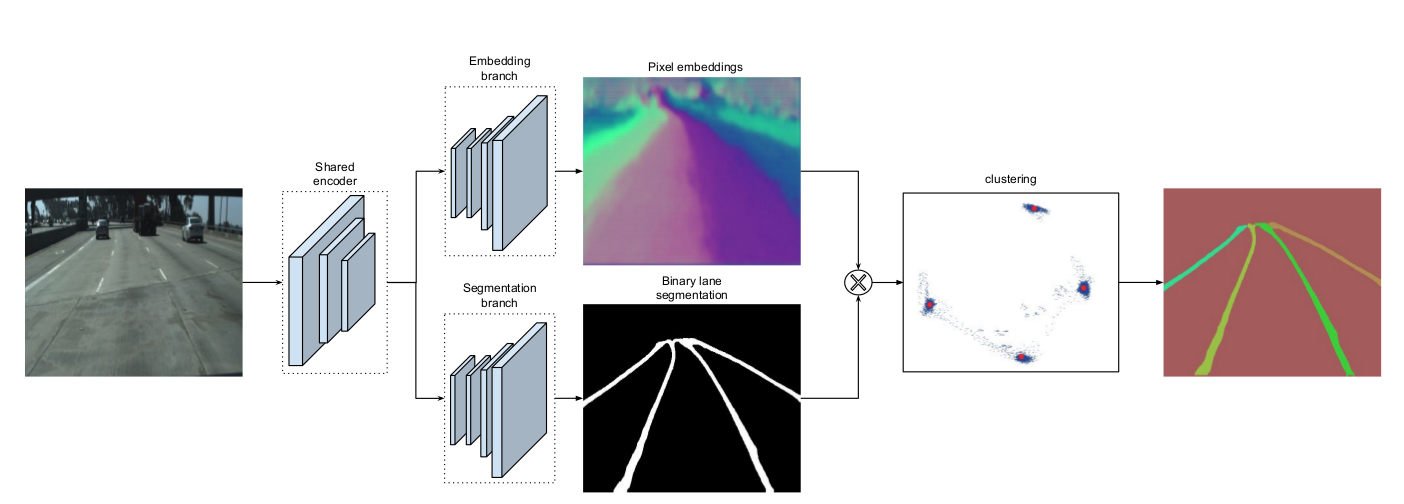
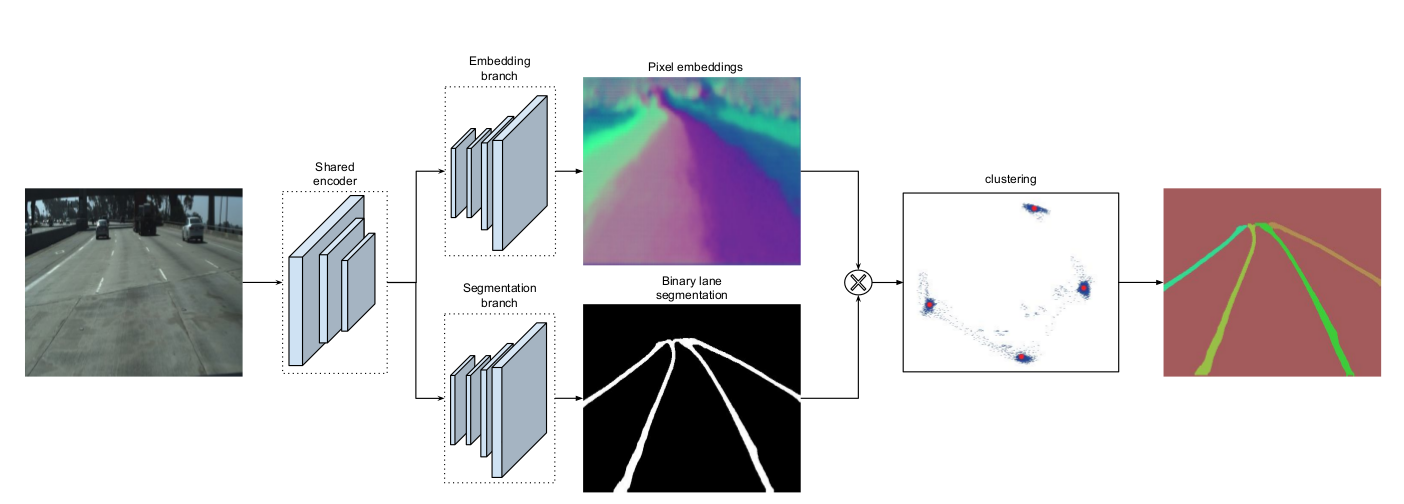
LaneNet-Lane-Detection 是一个基于 TensorFlow 实现的车道线检测开源项目,核心算法源自 IEEE IV 会议论文《Towards End-to-End Lane Detection: an Instance Segmentation Approach》。该项目旨在解决自动驾驶和辅助驾驶场景中的实时车道线识别问题,通过深度学习模型实现端到端的车道线检测,无需传统的手工特征提取或后处理步骤。
标签
项目特点
基于 TensorFlow 实现,支持 GPU 加速推理
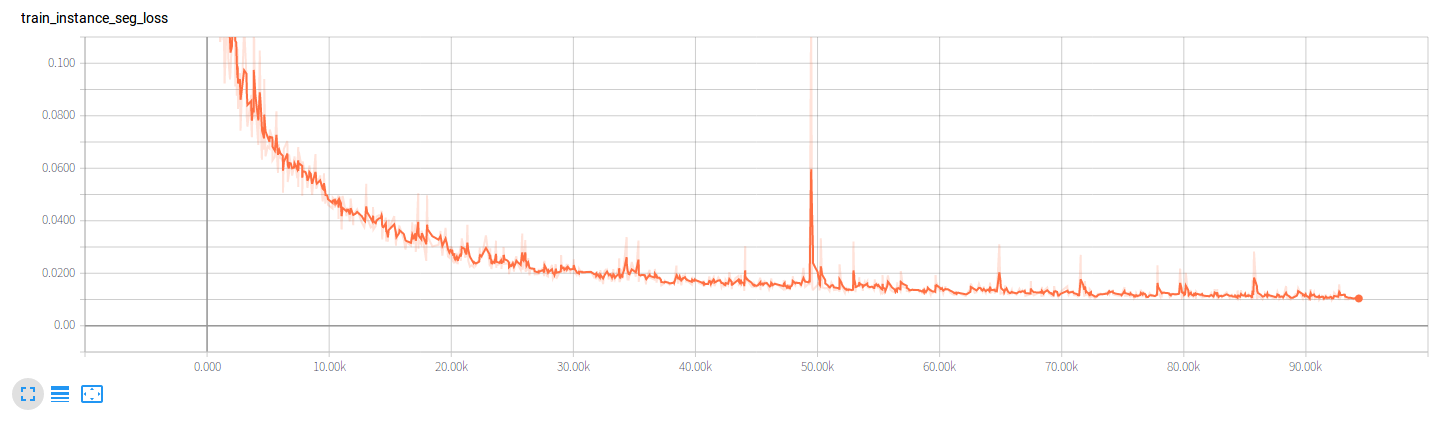
采用实例分割方法,可区分不同车道线实例
支持 VGG16 和 BiseNetV2 两种骨干网络
提供预训练模型,可直接用于测试和评估
包含完整的训练、评估、测试脚本
支持将模型转换为 MNN 格式,部署到移动设备
提供 Tusimple 数据集自动处理工具
支持自定义数据集,并提供参数调整建议
技术规格
| 框架 | TensorFlow 1.12.0+ |
|---|---|
| 编程语言 | Python 3.5 |
| 硬件要求 | NVIDIA GPU (测试于 GTX-1070) |
| CUDA 版本 | 9.0 |
| cuDNN 版本 | 7.0 |
| 推理速度 | ~50fps (VGG16) / ~78fps (BiseNetV2) |
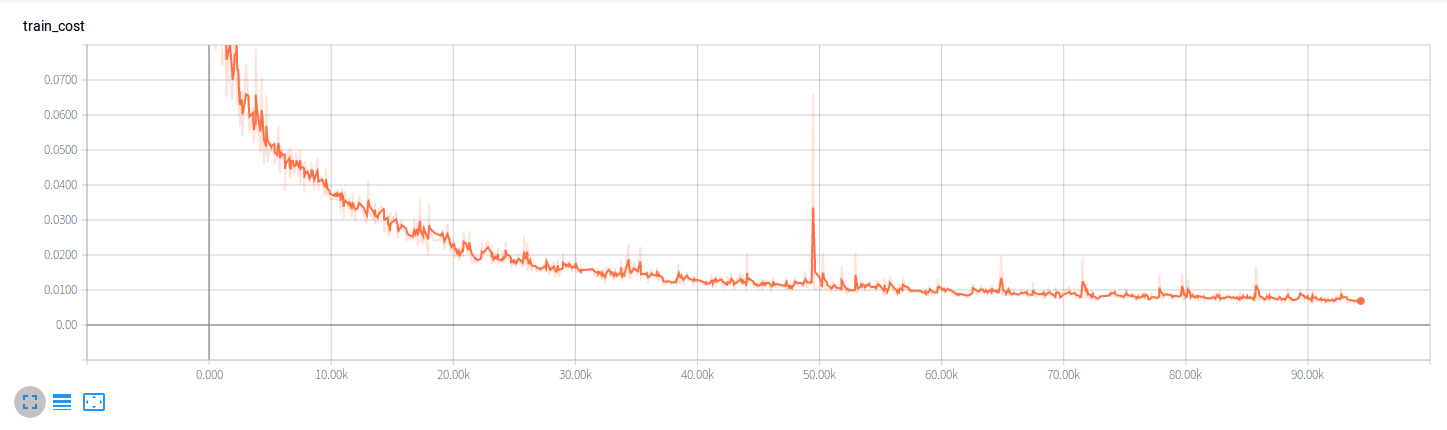
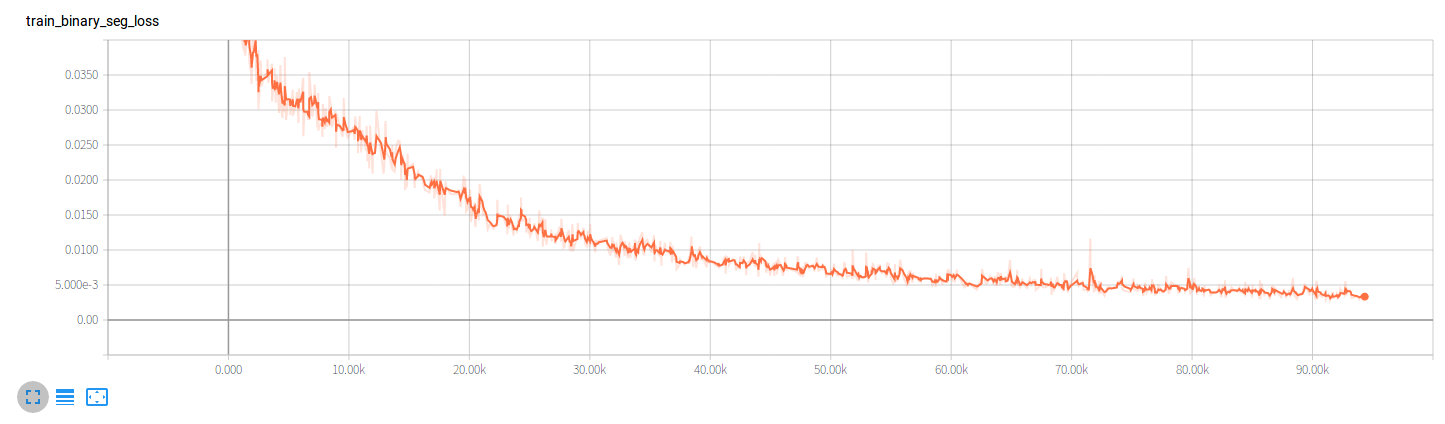
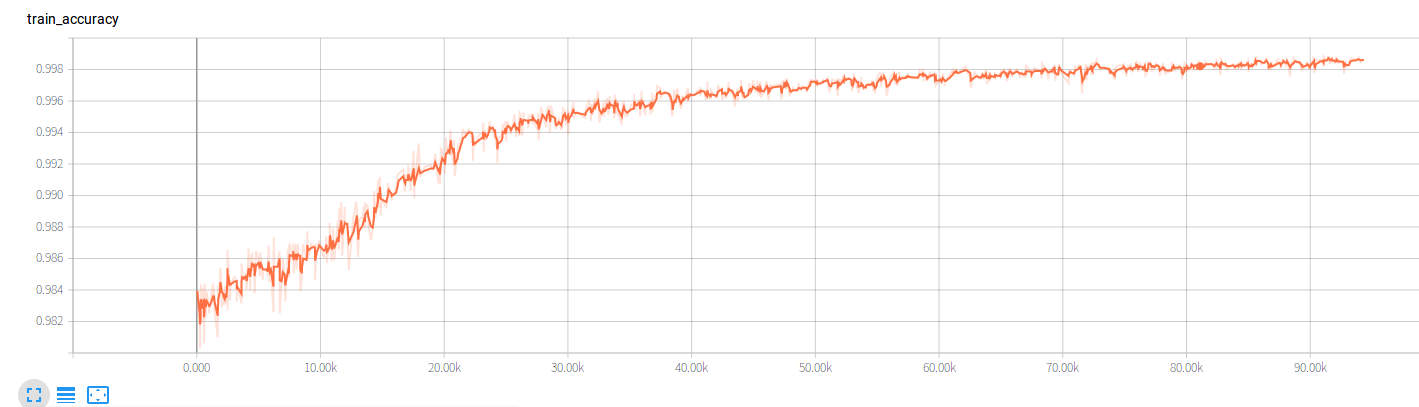
| 训练轮数 | 80010 epochs |
| 批大小 | 4 |
| 初始学习率 | 0.001 |
| 学习率策略 | Polynomial decay, power=0.9 |
| 优化器 | SGD (原论文使用 Adam) |
| 数据集 | Tusimple Lane Detection Benchmark |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Ubuntu 16.04 x64 | 1 | — | 操作系统 |
| Python 3.5 | 1 | — | 编程环境 |
| TensorFlow 1.12.0 | 1 | — | 深度学习框架 |
| CUDA 9.0 | 1 | — | GPU 计算平台 |
| cuDNN 7.0 | 1 | — | GPU 加速库 |
| NVIDIA GTX-1070 GPU | 1 | — | 推荐显卡 |
| Tusimple 车道线数据集 | 1 | — | 训练和测试数据 |
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 3/5
⚪ 数理与计算: 4/5
⚪ 动手与操作: 2/5
⚪ 狂热与坚持: 3/5
⚪ 创造与创新: 3/5
项目图库





所需技能
🔧 **动手能力**:能够配置深度学习环境(CUDA、cuDNN、TensorFlow),处理数据集,运行训练和推理脚本
💻 **编程能力**:熟练使用 Python,理解 TensorFlow 深度学习框架,能够修改配置文件(YAML)和训练脚本
⚡ **电子电路**:无需电子电路知识
适用场景
自动驾驶车道线检测系统开发
智能驾驶辅助系统的车道识别模块
移动端车道线检测应用(通过 MNN 部署)
深度学习实例分割方法的研究与实验
车道线数据集的自动标注工具开发