summary: Instant neural graphics primitives: lightning fast NeRF and more
instant-ngp
3/5
🧩 软硬件结合
已发布
项目简介
Instant neural graphics primitives: lightning fast NeRF and more
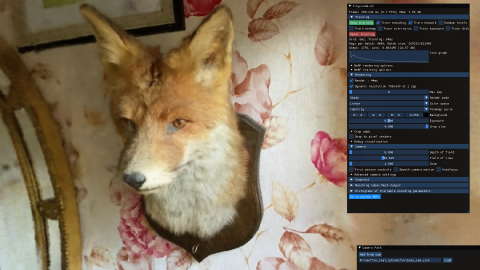
instant-ngp 是 NVIDIA 实验室推出的一款革命性的开源项目,旨在实现神经图形基元的“即时”训练与渲染。其核心突破在于,以往需要数小时甚至数天才能完成的神经辐射场(NeRF)训练,现在可以在短短几秒钟内完成——例如,训练一只狐狸的 NeRF 模型仅需不到 5 秒。这一惊人速度得益于项目提出的多分辨率哈希编码技术,该编码作为 MLP 的输入,结合 tiny-cuda-nn 框架,极大提升了训练与推理效率。
标签
项目特点
**超快训练速度**:使用多分辨率哈希编码,在 RTX 3090 上可在5秒内完成 NeRF 训练
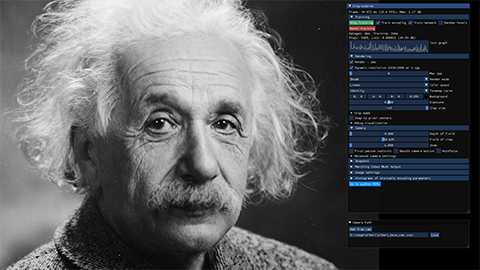
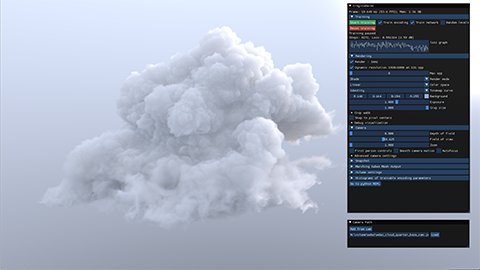
**多种神经基元支持**:同时支持 NeRF、SDF、神经图像和神经体积四种基元
**交互式 GUI**:提供丰富的用户界面,包括相机控制、训练控制、渲染模式切换等
**VR 模式**:支持通过虚拟现实头显查看神经图形基元
**快照系统**:支持保存和加载训练好的模型,方便分享
**相机路径编辑**:可创建相机路径并渲染视频
**网格转换**:支持 NeRF 和 SDF 到网格的转换
**Python 绑定**:提供开发者 Python API
技术规格
| 支持的神经基元 | NeRF, SDF, 神经图像, 神经体积 |
|---|---|
| 核心框架 | tiny-cuda-nn |
| 输入编码 | 多分辨率哈希编码 |
| 最低 GPU 要求 | NVIDIA GPU(支持 CUDA) |
| 推荐 GPU | RTX 3090(含张量核心) |
| 训练时间(NeRF) | < 5秒(RTX 3090) |
| 编程语言 | C++14, Python |
| CUDA 版本 | Windows: 11.5+, Linux: 10.2+ |
| 构建系统 | CMake v3.21+ |
| 可选依赖 | OptiX 7.6+(加速SDF训练), Vulkan SDK(DLSS支持) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| NVIDIA GPU(支持CUDA) | 1 | — | 推荐RTX 3090或更高 |
| CUDA Toolkit | 1 | — | Windows 11.5+, Linux 10.2+ |
| CMake | 1 | — | v3.21或更高 |
| C++编译器 | 1 | — | VS 2019/2022(Windows)或 GCC 8+(Linux) |
| OptiX SDK | 1 | — | v7.6+,加速SDF训练 |
| Vulkan SDK | 1 | — | DLSS支持 |
| Python | 1 | — | v3.8+,用于Python绑定 |
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 1/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 1/5
🔵 数理与计算: 5/5
🔵 动手与操作: 3/5
🔵 狂热与坚持: 4/5
🔵 创造与创新: 5/5
项目图库




视频
所需技能
🔧 **动手能力**:需要配置CUDA环境和编译C++项目,安装依赖库,对Linux/Windows系统操作有一定要求
💻 **编程能力**:需要C++和CUDA编程基础,了解CMake构建系统,Python用于脚本和绑定
⚡ **电子电路**:不涉及
适用场景
3D场景快速重建与新视角合成
科研与学术研究(计算机图形学、计算机视觉)
工业视觉检测与机器人环境感知
数字孪生与虚拟现实内容创建
高分辨率图像与体积数据的神经表示学习