jetson-inference
jetson-inference
机器人
3/5
🧩 软硬件结合
已发布

项目简介
Hello AI World guide to deploying deep-learning inference networks and deep vision primitives with TensorRT and NVIDIA J
jetson-inference 是一个专为 NVIDIA Jetson 边缘计算平台打造的深度学习推理与实时视觉库。该项目旨在解决在资源受限的嵌入式设备上高效部署复杂神经网络模型的难题,让开发者无需深厚的底层优化知识,即可在 Jetson 上实现高性能的计算机视觉应用。
标签
项目特点
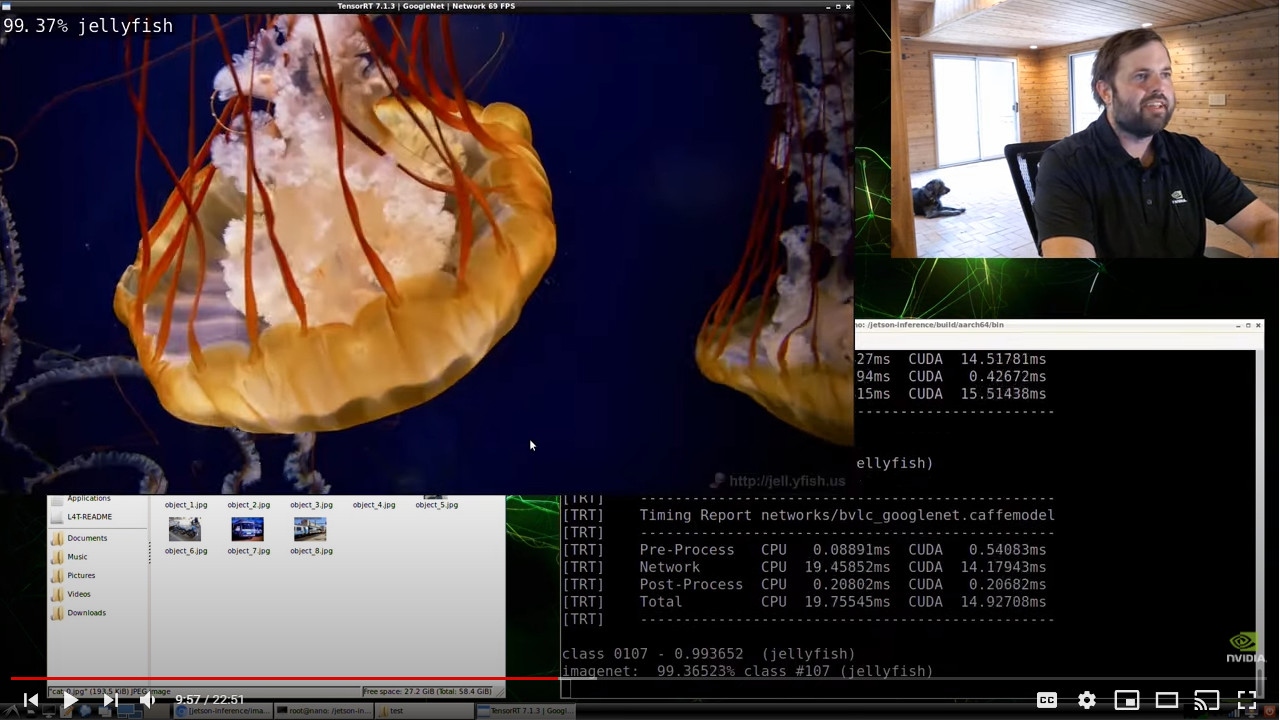
**专为 Jetson 优化**:利用 TensorRT 在 Jetson 设备上实现高性能深度学习推理。
**多语言支持**:提供 C++ 和 Python 两种编程语言的 API 和示例代码。
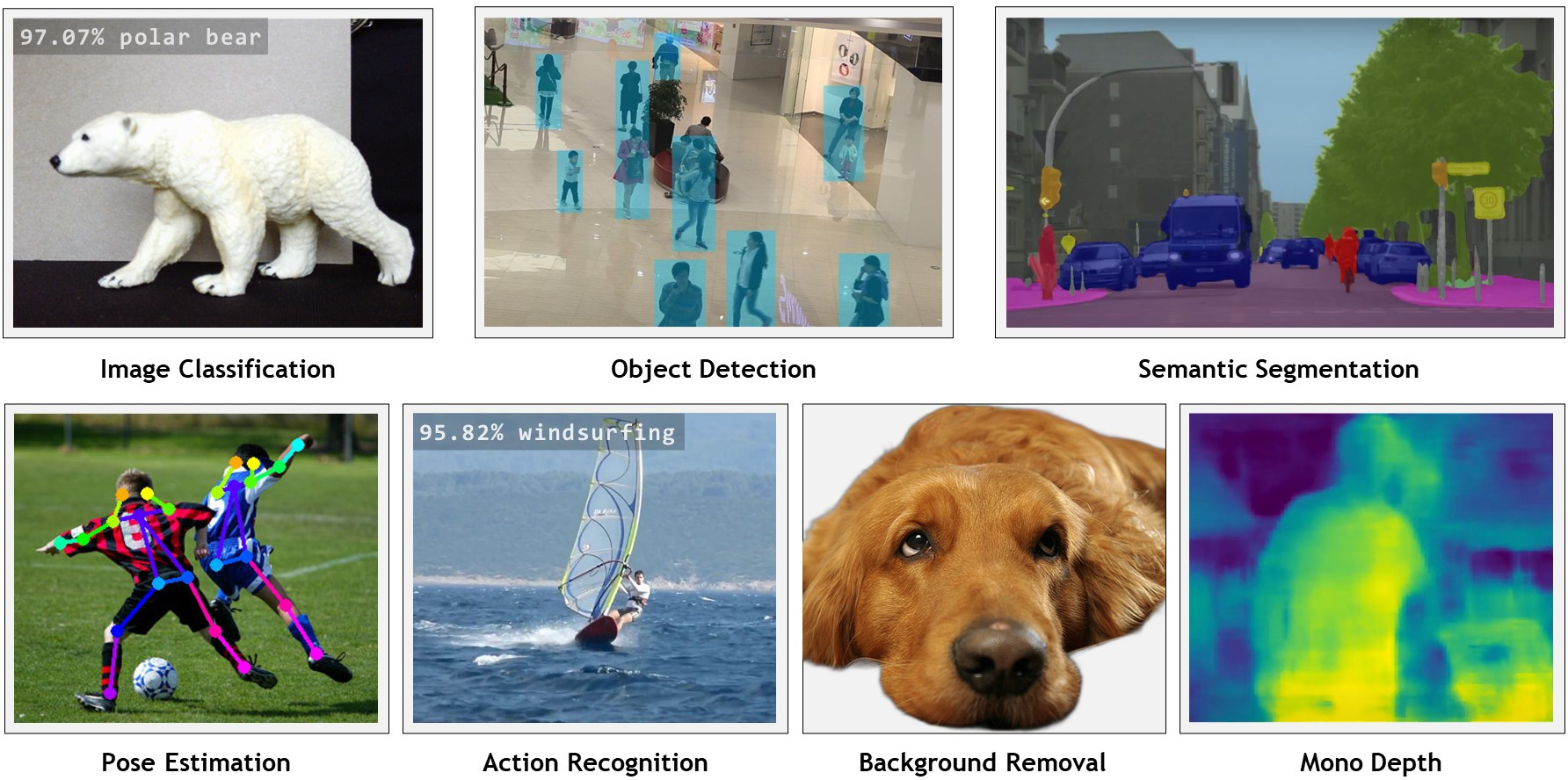
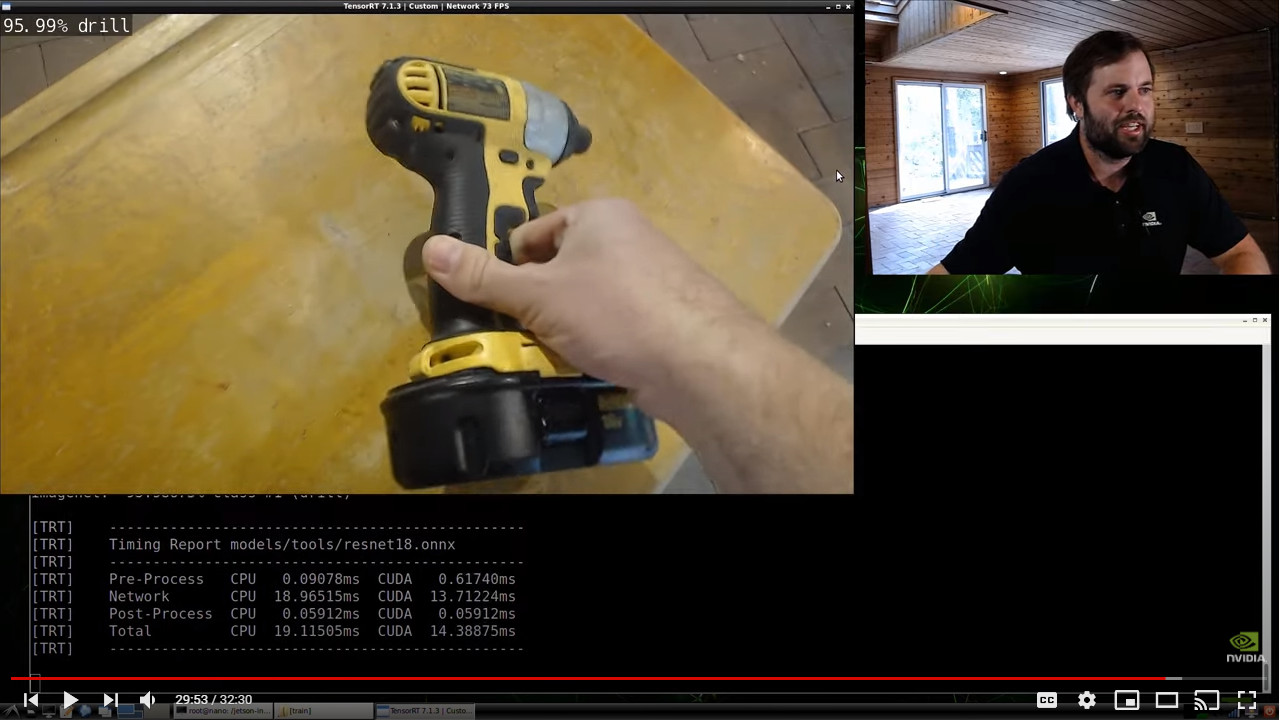
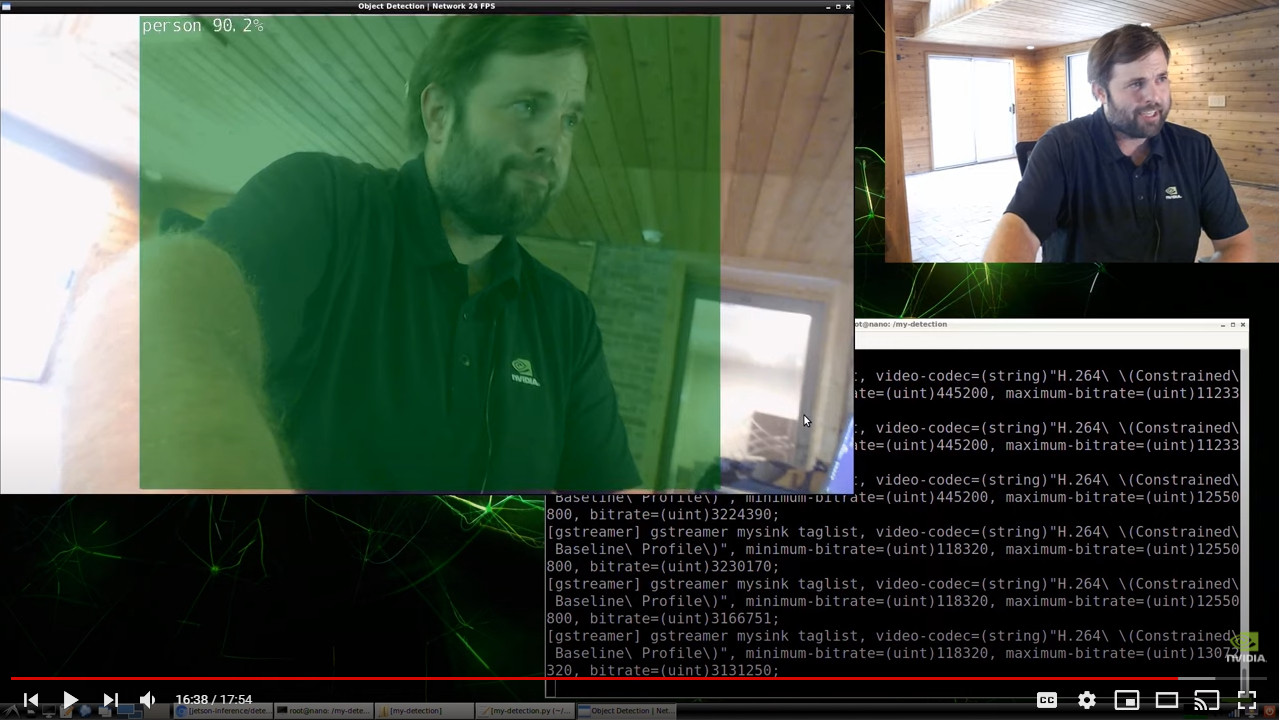
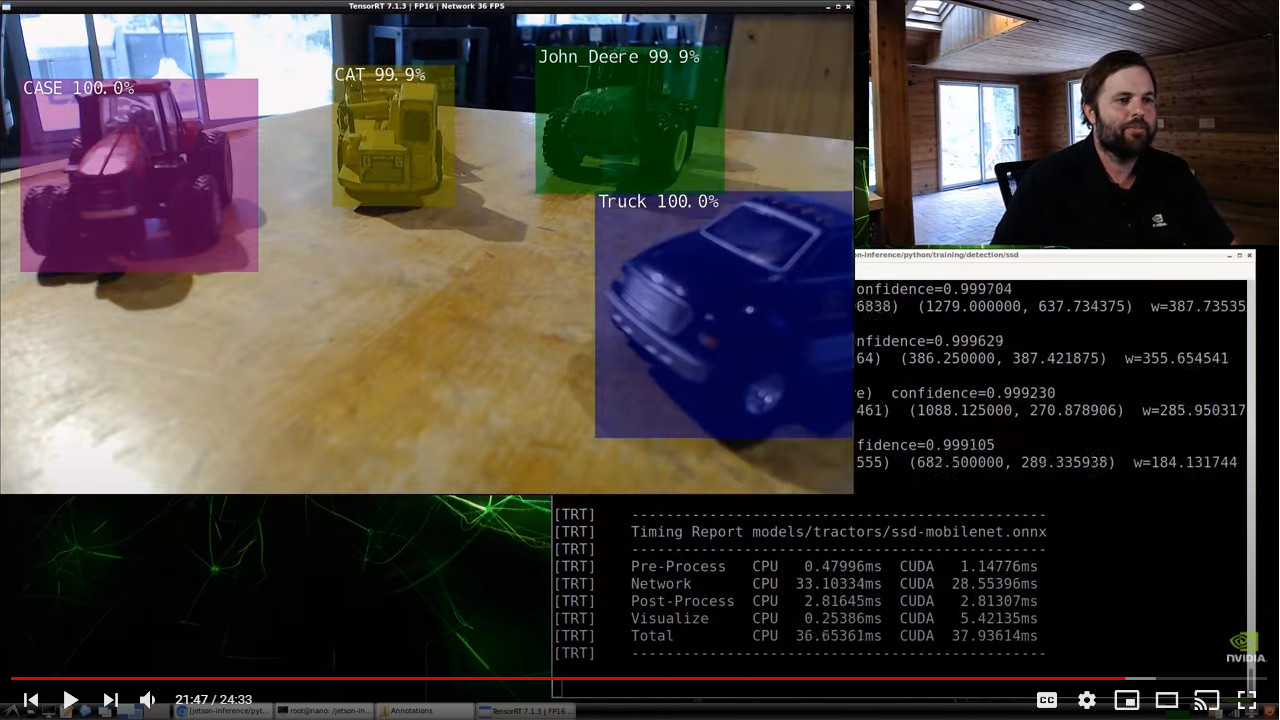
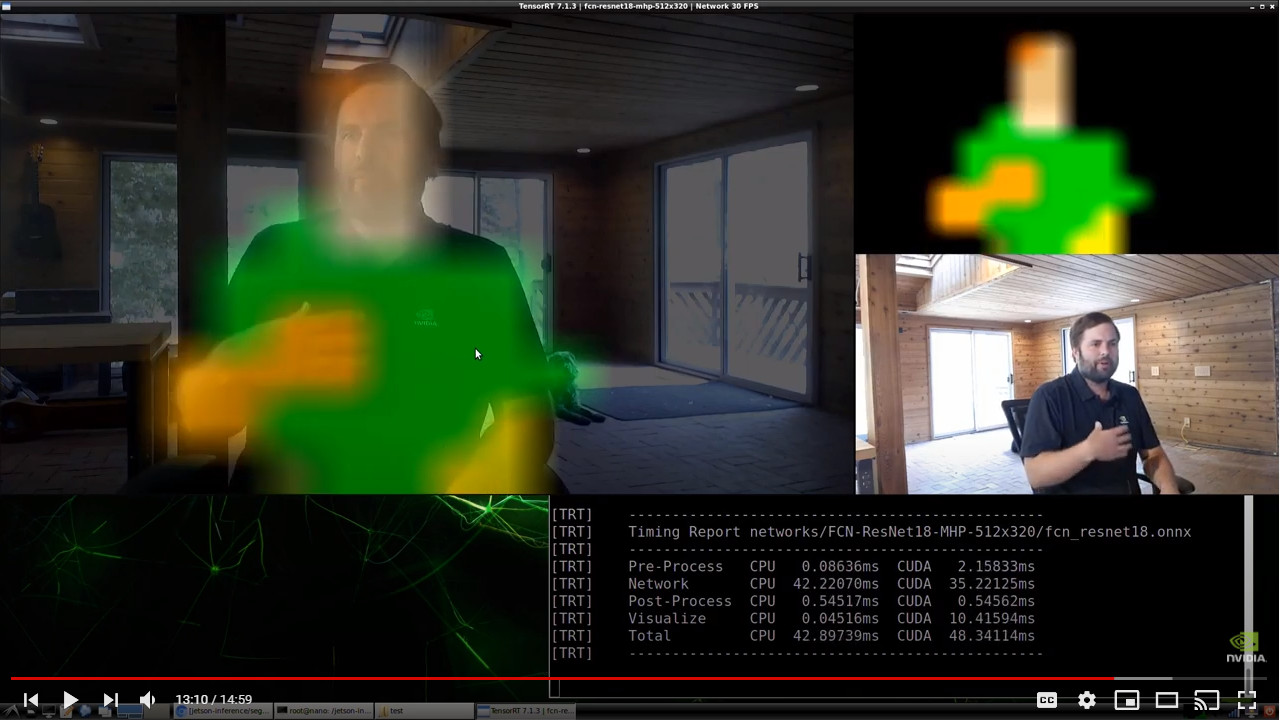
**丰富的视觉原语**:内置图像分类、目标检测、语义分割、姿态估计和动作识别等预训练模型。
**端到端工作流**:支持从数据收集、PyTorch 模型训练到 TensorRT 部署的完整流程。
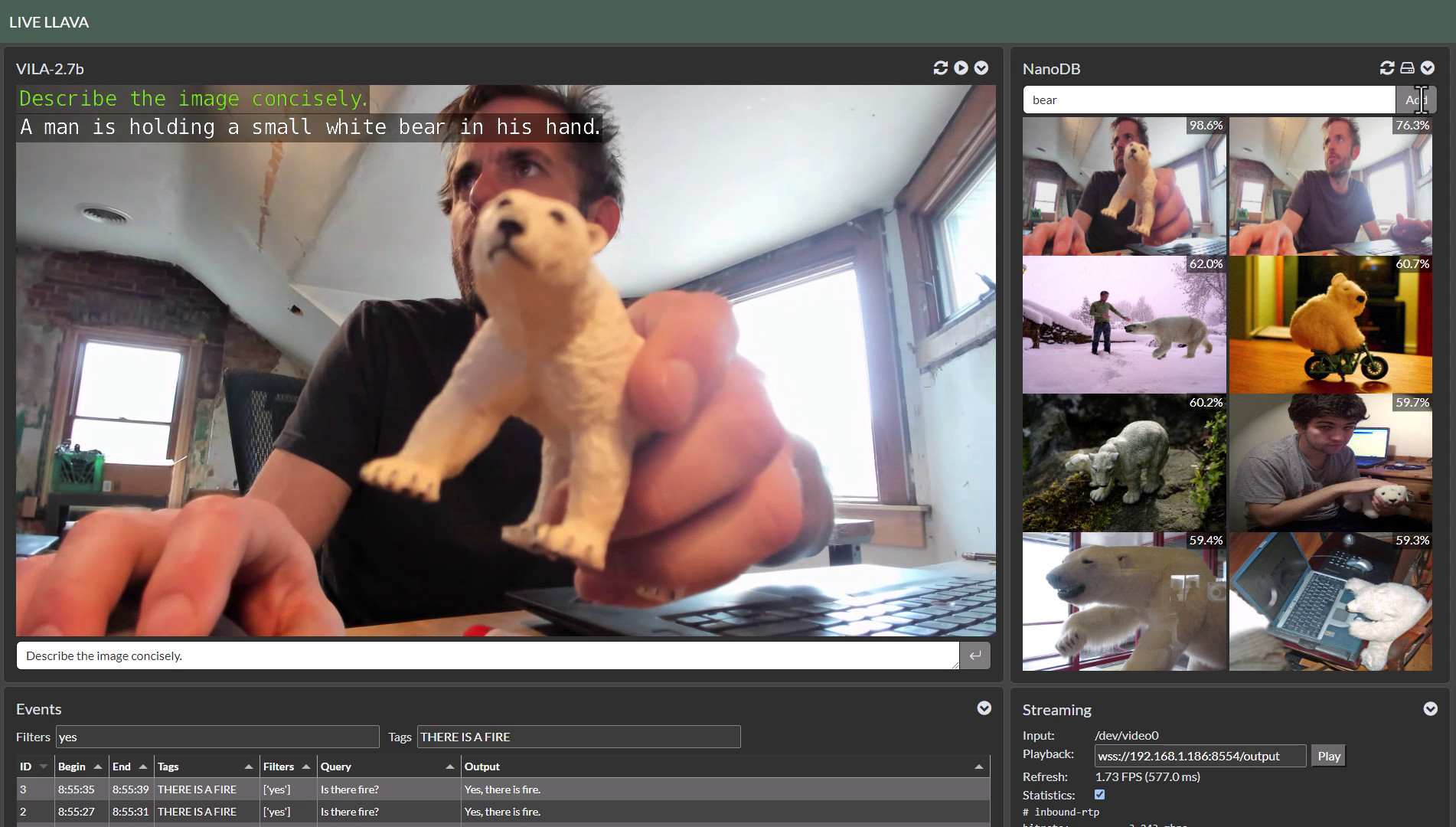
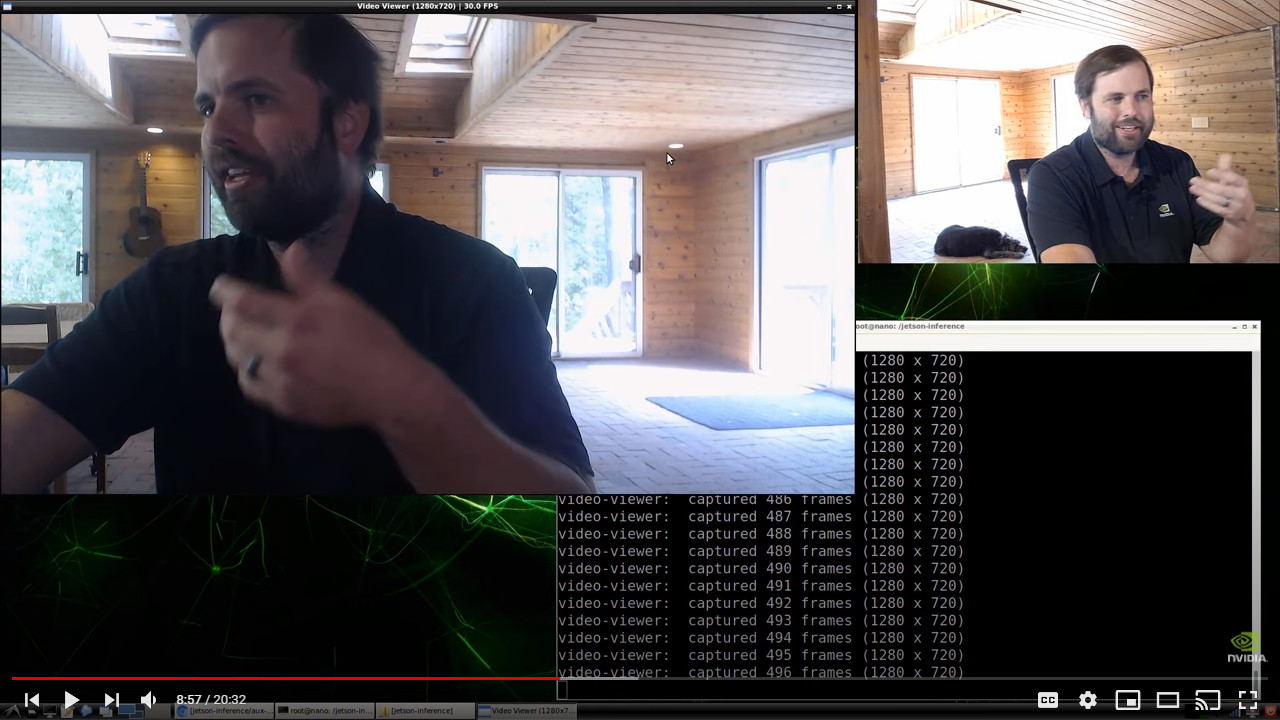
**实时与交互式应用**:支持实时摄像头推理、WebRTC 网页应用和 ROS/ROS2 集成。
**活跃的社区与扩展**:与 Jetson AI Lab 项目联动,提供 LLM、ViT 等更高级的 AI 教程。
技术规格
| 目标平台 | NVIDIA Jetson (Nano, TX1/TX2, Xavier NX/AGX, Orin NX/AGX) |
|---|---|
| 核心依赖 | TensorRT, PyTorch, CUDA, OpenCV |
| 编程语言 | C++, Python |
| 支持的视觉任务 | 图像分类、目标检测、语义分割、姿态估计、动作识别、背景移除、单目深度估计 |
| 模型训练框架 | PyTorch |
| 推理优化引擎 | TensorRT |
| 部署方式 | Docker 容器或源码编译 |
| 系统要求 | JetPack 4.4+ (推荐 JetPack 6) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| NVIDIA Jetson 设备 | 1 | — | Nano, TX2, Xavier, Orin 等 |
| 摄像头 (USB/CSI) | 1 | — | 用于实时推理演示 |
| JetPack SDK | 1 | — | 包含 CUDA, TensorRT, OpenCV 等 |
| Docker (可选) | 1 | — | 推荐使用容器部署 |
| PyTorch | 1 | — | 用于模型训练 |
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 1/5
🔵 数理与计算: 4/5
🔵 动手与操作: 4/5
🔵 狂热与坚持: 3/5
🔵 创造与创新: 3/5
项目图库





视频
所需技能
🔧 **动手能力**:需要能够设置 NVIDIA Jetson 硬件(连接摄像头、电源、网络),并运行 Docker 容器或从源码编译项目。
💻 **编程能力**:需要具备 Python 或 C++ 编程基础,能够理解并修改推理和训练脚本。了解深度学习基本概念(如模型、推理、训练)会非常有帮助。
⚡ **电子电路**:基本了解摄像头(USB/CSI)的连接和配置即可,无需复杂的电路知识。
适用场景
**边缘 AI 应用开发**:在 Jetson 设备上快速部署和测试图像分类、目标检测等视觉 AI 模型。
**机器人视觉**:为机器人提供实时物体识别、姿态估计和语义理解能力,可集成到 ROS/ROS2 系统中。
**智能监控与分析**:利用实时摄像头流进行人员检测、行为识别或场景分割。
**AI 教育与研究**:作为学习深度学习部署和嵌入式 AI 的实践教程,适合学生和研究人员。
**原型验证**:在硬件上快速验证 AI 模型的效果和性能,加速产品原型开发。