XLeRobot 双机械臂移动家用机器人
XLeRobot
4/5
🧩 软硬件结合
已发布
项目简介
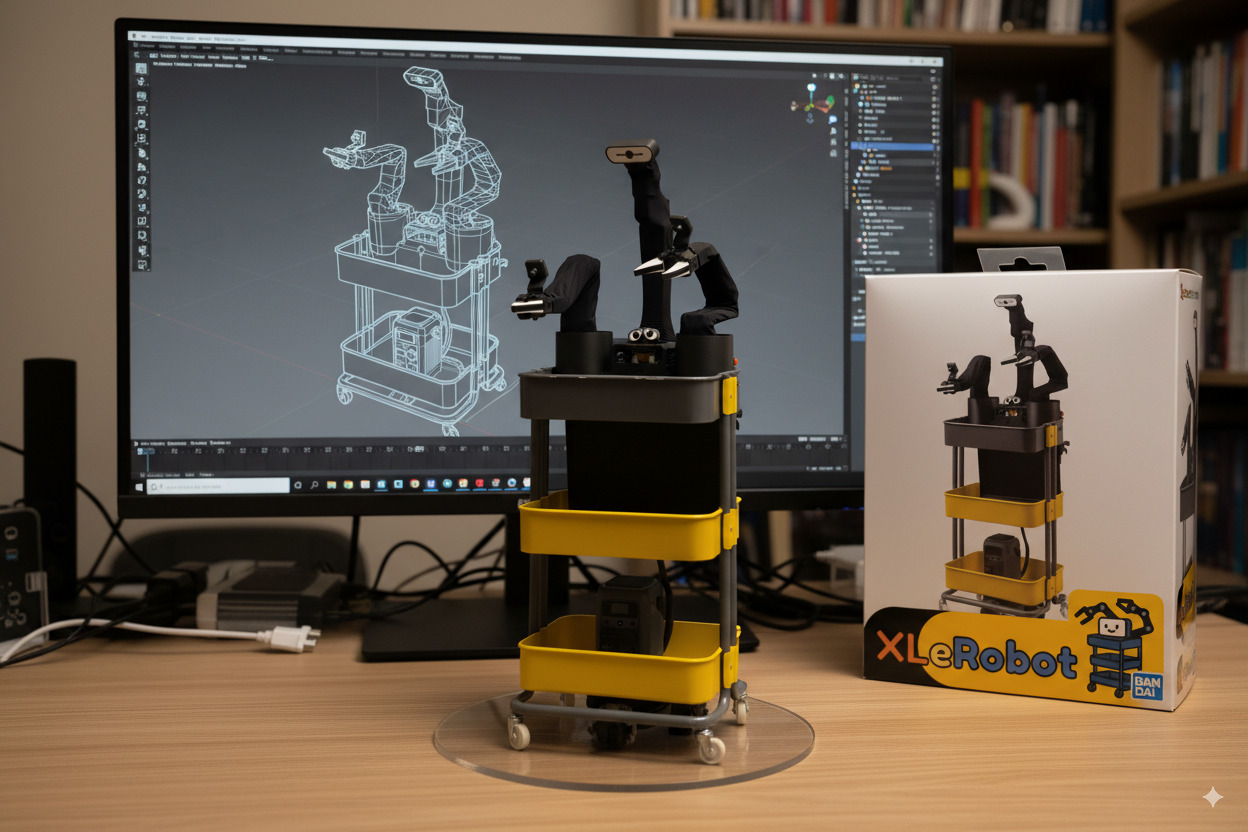
XLeRobot: Practical Dual-Arm Mobile Home Robot for $660
XLeRobot是一个致力于让具身智能(Embodied AI)普及化的开源机器人项目,其核心理念是“比iPhone更便宜”——全套硬件成本最低仅需约660美元,且组装时间不超过4小时。该项目基于LeRobot、SO-100、Lekiwi等优秀开源项目构建,旨在降低机器人学习和研究的门槛,让更多开发者、学生和爱好者能够轻松拥有并操控自己的家用机器人。
项目特点
**极致低成本**:基础版本总成本仅约 660 美元,比一部 iPhone 还便宜。
**快速组装**:总组装时间少于 4 小时,适合快速上手。
**双机械臂设计**:配备两个机械臂,能够执行更复杂的家庭操作任务。
**移动底盘**:支持双轮差速底盘,可在家庭环境中自由移动。
**多种控制方式**:支持键盘、Xbox 手柄、Switch Joy-Con 和 VR 控制器(如 Quest 3)进行实时遥操作。
**丰富的软件支持**:提供完整的软件栈,包括仿真环境(MuJoCo)、强化学习(RL)环境、视觉-语言-动作(VLA)模型训练教程。
**开源与社区驱动**:完全开源,拥有活跃的 Discord 社区和详细的文档网站。
**模块化设计**:硬件和软件均采用模块化设计,易于扩展和定制。
技术规格
| 总成本(基础版) | 约 660 美元(不含3D打印、工具、运费和税费) |
|---|---|
| 组装时间 | < 4 小时 |
| 机械臂 | 双机械臂(基于 SO-100/SO-101) |
| 移动底盘 | 双轮差速底盘(支持默认舵机或可选无刷电机) |
| 主控制器 | 可选:笔记本电脑 / Raspberry Pi |
| 摄像头 | 基础版:单 RGB 头部摄像头;可选:立体双目 RGB 摄像头 / RealSense RGBD 深度摄像头 |
| 控制方式 | 键盘、Xbox 手柄、Switch Joy-Con、VR 控制器(Quest 3) |
| 仿真环境 | MuJoCo,支持 3DGS 渲染 |
| 软件框架 | 基于 LeRobot,支持 RL 和 VLA 训练 |
| 许可证 | Apache 2.0 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 3D打印件 | 1套 | — | 详见文档中的3D打印文件 |
| IKEA 推车 | 1 | — | 作为机器人底座 |
| 舵机 (用于机械臂) | 12 | — | 具体型号见BOM文档 |
| 舵机/无刷电机 (用于底盘) | 2 | — | 双轮差速驱动 |
| 笔记本电脑 / Raspberry Pi | 1 | — | 可选,用于运行主控程序 |
| RGB 摄像头 | 1 | — | 基础版单目 |
| RealSense D435 (可选) | 1 | — | 用于深度感知 |
| 锂电池 | 1 | — | 为机器人供电 |
| 螺丝、线材、连接器等 | 1套 | — | 详见BOM文档 |
3D 模型
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
🔵 数理与计算: 3/5
🔵 动手与操作: 4/5
🔵 狂热与坚持: 4/5
🔵 创造与创新: 4/5
项目图库












视频
所需技能
🔧 **动手能力**:需要具备一定的机械组装能力,能够使用螺丝刀、焊台等工具完成机器人的硬件组装和布线。
💻 **编程能力**:需要熟悉 Python 编程语言,了解基本的 Linux 操作(如 Ubuntu)、Git 版本控制和命令行操作。能够运行 Python 脚本、安装依赖库。
⚡ **电子电路**:需要具备基础的电子电路知识,能够连接电机、传感器、控制器和电池等电子元件,并进行简单的电路调试。
适用场景
**家庭自动化**:执行简单的家务任务,如物品抓取、搬运、整理等。
**具身智能研究**:作为低成本的研究平台,用于验证和开发机器人操作、导航、强化学习、VLA 模型等算法。
**机器人教育**:作为教学平台,帮助学生理解机器人系统集成、控制理论和人工智能。
**创客与DIY**:为机器人爱好者和创客提供一个功能强大且可高度定制的开源机器人项目。
**远程监控与操作**:通过 VR 或手柄进行远程遥操作,探索家庭环境。