BB8_ESP32
BB8_ESP32
2/5
🧩 软硬件结合
已发布
项目简介
请提供需要翻译的英文技术内容。
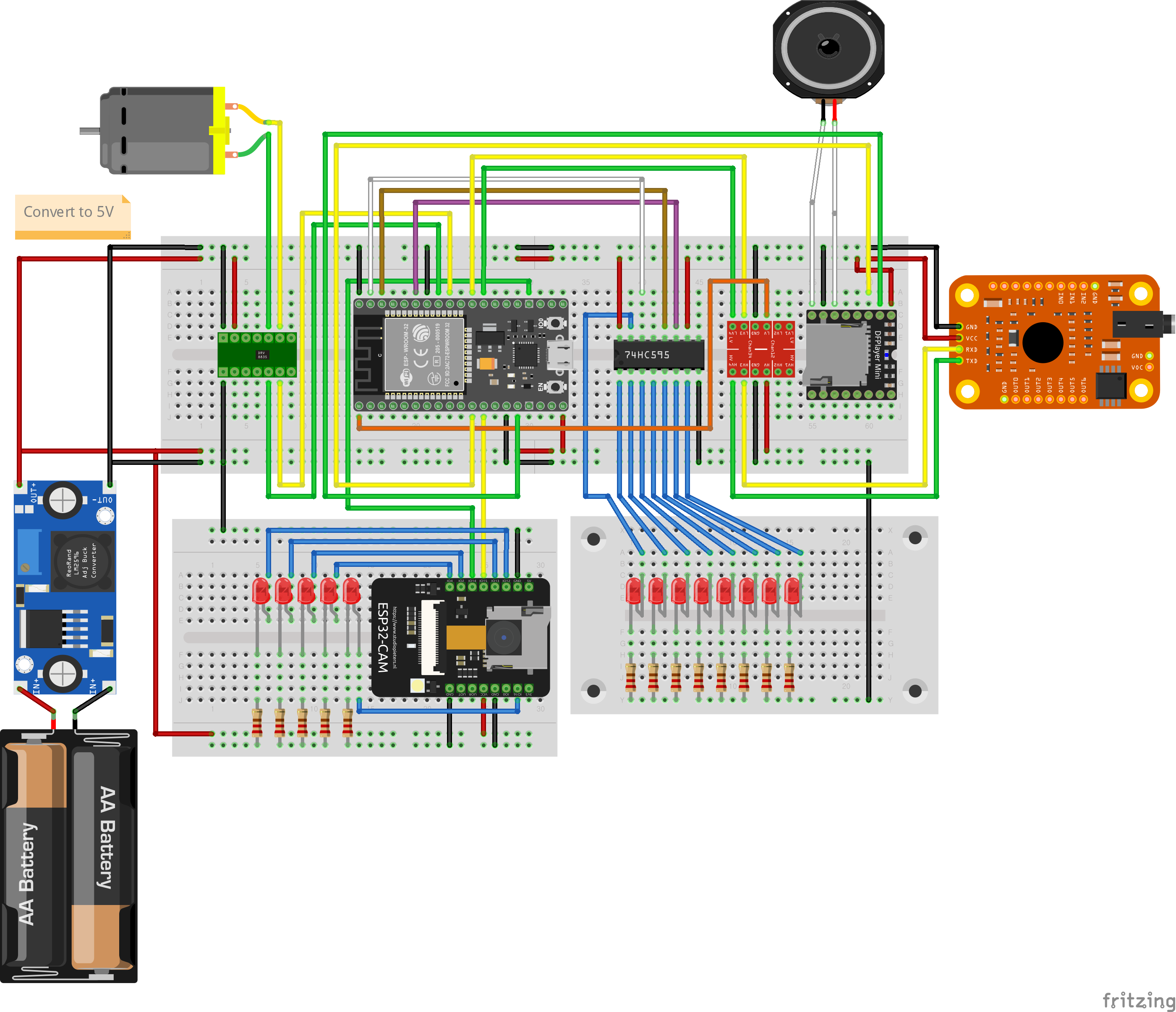
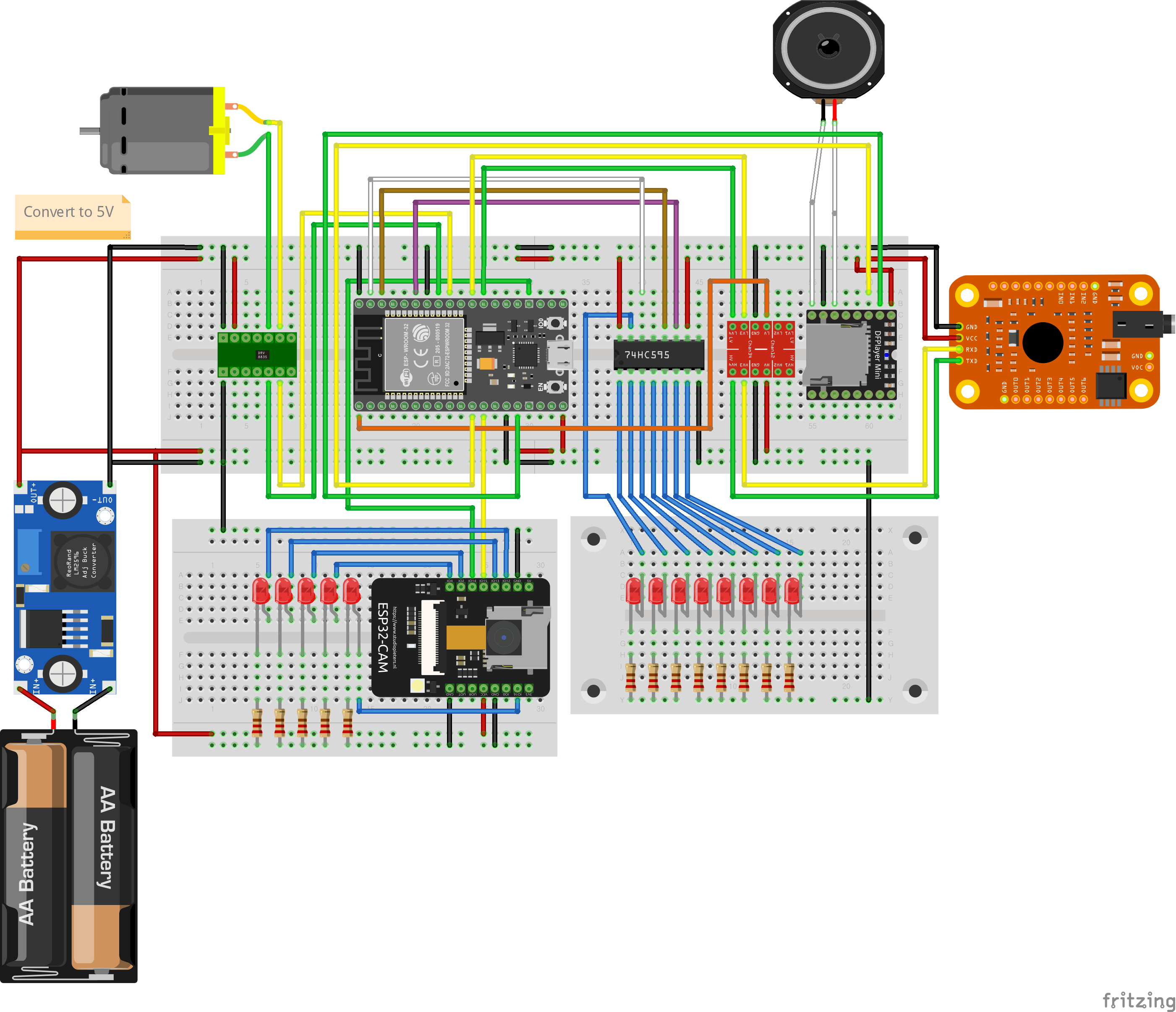
这是一个基于《星球大战》BB-8机器人形象改造的开源项目,核心目标是用ESP32系列芯片打造一个可遥控、可自主运行的球形机器人。项目采用双ESP32架构:头部使用ESP32-CAM模块,负责图像采集与视觉处理;身体部分使用标准ESP32,负责电机驱动、运动控制和传感器数据融合。两个模块通过Wi-Fi或蓝牙进行通信,实现头部与身体的协同运动。
项目特点
基于 ESP32 和 ESP32-CAM 双芯片架构,实现头部与身体的独立控制。
开源硬件设计,提供项目草图。
复刻经典《星球大战》BB-8 机器人外观。
技术规格
| 主控芯片(头部) | ESP32-CAM |
|---|---|
| 主控芯片(身体) | ESP32 |
| 项目类型 | 机器人 |
| 参考原型 | 《星球大战》BB-8 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| ESP32-CAM | 1 | — | 用于头部控制 |
| ESP32 开发板 | 1 | — | 用于身体控制 |
| 3D打印外壳及结构件 | 1套 | — | 需自行设计或寻找开源模型 |
| 电机驱动模块 | 2 | — | 用于驱动身体运动 |
| 减速电机 | 2 | — | 用于驱动轮子 |
| 锂电池 | 2 | — | 为两个ESP32供电 |
| 电源管理模块 | 2 | — | 电池充放电管理 |
| 连接线、螺丝等 | 若干 | — | 组装用 |
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 2/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
🔵 数理与计算: 2/5
🔵 动手与操作: 4/5
⚪ 狂热与坚持: 3/5
⚪ 创造与创新: 3/5
项目图库
所需技能
🔧 **动手能力**:需要具备3D打印、机械组装和焊接等动手能力,能够独立完成机器人的硬件搭建。
💻 **编程能力**:需要掌握Arduino或ESP-IDF编程,能够编写和调试ESP32及ESP32-CAM的控制代码。
⚡ **电子电路**:需要了解电机驱动、电源管理、传感器接口等基础电路知识,能够进行电路连接和故障排查。
适用场景
机器人制作爱好者的进阶项目,用于学习和实践双芯片协同控制。
《星球大战》粉丝的DIY复刻项目,制作可动的BB-8模型。
嵌入式系统教学案例,展示ESP32系列芯片在机器人领域的应用。