reBot-DevArm 开源机械臂
reBot-DevArm
3/5
🧩 软硬件结合
已发布
项目简介
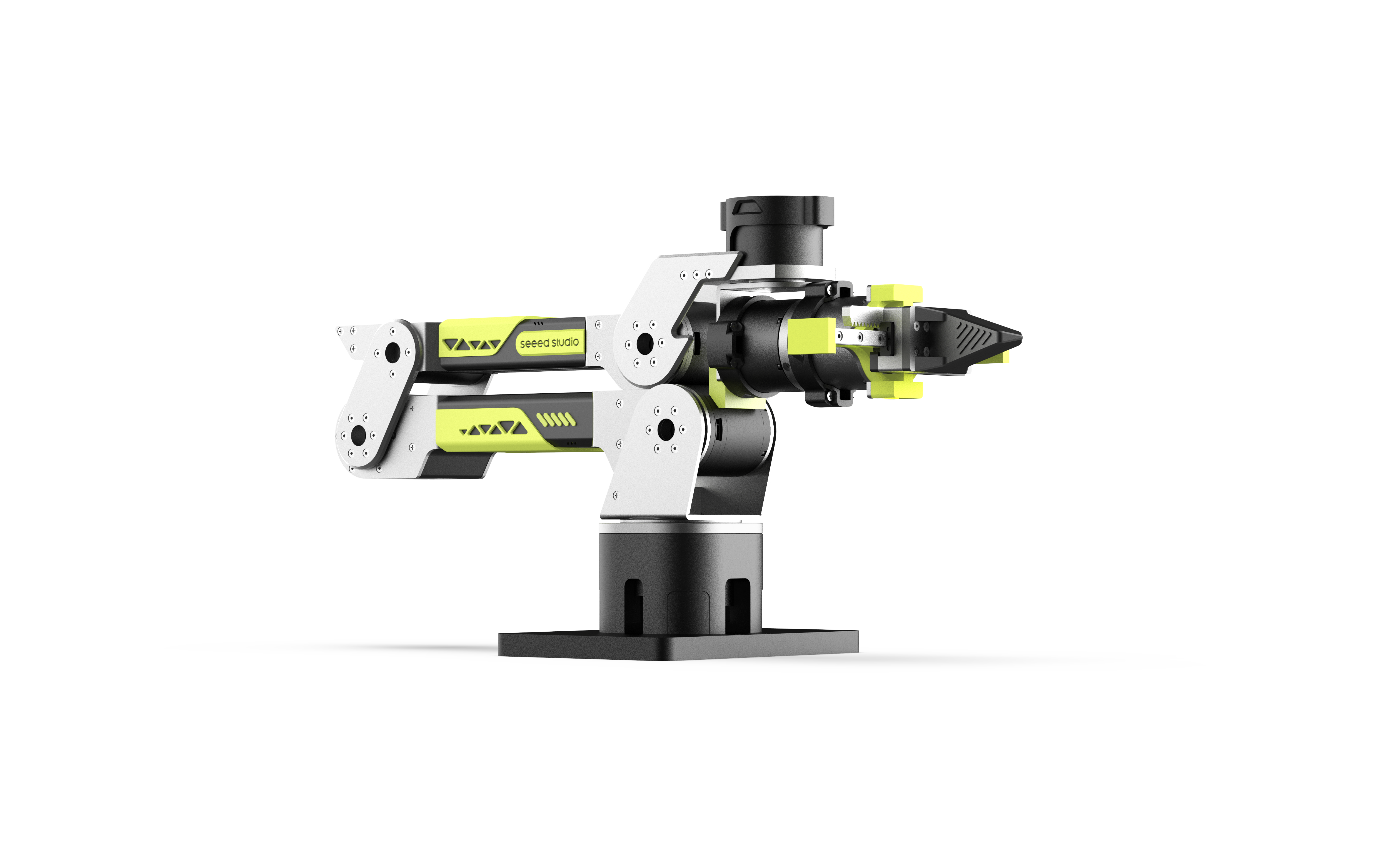
Open Source Robotic Arm for All Developers
reBot-DevArm 是一个面向所有开发者的开源机械臂项目,致力于降低具身智能(Embodied AI)的学习门槛。该项目真正践行了“完全开源”的理念,不仅开放软件代码,更将硬件设计图纸、BOM物料清单(详细到每颗螺丝的规格与购买链接)、3D打印与钣金件源文件等全部公开,让开发者能够从零开始构建属于自己的机械臂。
项目特点
**100% 真开源**:不仅开源软件代码,还开源了钣金件和3D打印件的源文件、详细的BOM清单(精确到每颗螺丝的规格和购买链接)。
**双版本设计**:提供外观相同但电机不同的两个版本(Robostride 和 Damiao),满足不同用户的需求。
**完整软硬件栈**:从硬件图纸、组装指南到 Python SDK、ROS 集成、AI 训练框架(LeRobot)和仿真(Isaac Sim),提供一站式解决方案。
**强大的生态兼容性**:支持 ROS1/2、LeRobot、Pinocchio、Isaac Sim 等主流机器人开发生态。
**活跃的社区支持**:拥有 Discord 社区和详细的 Wiki 文档,并提供多种套件选项。
技术规格
| **型号** | reBot Arm B601-DM / reBot Arm B601-RS |
|---|---|
| **推荐有效负载** | 1.5 kg |
| **最大工作半径** | 650 mm |
| **重量** | 约 4.5 kg |
| **重复定位精度** | < 0.2 mm |
| **自由度** | 6 轴 + 1 夹爪 |
| **供电电压** | DC 24V |
| **支持平台/生态** | ROS1, ROS2, LeRobot, Pinocchio, Isaac Sim, Python SDK |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 大疆 DM 系列电机 (B601-DM 版本) | 6 | — | 或 Robostride 电机 (B601-RS 版本) |
| 夹爪电机 | 1 | — | 开源 CAN 伺服夹爪或关节电机夹爪 |
| 钣金件 | 1套 | — | 源文件在硬件目录 |
| 3D 打印件 | 1套 | — | 源文件在硬件目录 |
| 电源适配器 | 1 | — | 24V 4.5A,需单独购买 |
| 电源线 | 1 | — | 需单独购买 |
| 线束 | 1套 | — | 包含在电机套件中 |
| 螺丝等紧固件 | 1套 | — | 详细规格见 BOM 文档 |
3D 模型
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
🔵 数理与计算: 4/5
🔵 动手与操作: 5/5
🔵 狂热与坚持: 4/5
🔵 创造与创新: 4/5
项目图库





视频
所需技能
🔧 **动手能力**:需要具备机械组装、3D打印后处理、线束整理等动手能力。
💻 **编程能力**:需要掌握 Python 编程,了解 ROS 和 Linux 系统操作。
⚡ **电子电路**:需要了解基本的电路连接、电源配置和 CAN 总线通信。
适用场景
**机器人学习与研究**:作为学习机器人学、运动规划、控制算法的理想平台。
**具身智能开发**:结合 LeRobot 等框架,进行模仿学习、强化学习等 AI 算法的研究与验证。
**桌面级自动化应用**:用于实验室、小型工厂的轻量级抓取、分拣、装配等任务。
**创客与教育**:作为开源硬件项目,供创客、高校学生进行二次开发和教学实践。