ESP32 LinuxCNC 实时运动控制器
ESP32_LinuxCNC_MotionController_RealTime
3/5
已发布
项目简介
基于ESP32硬件的实时LinuxCNC运动控制器。
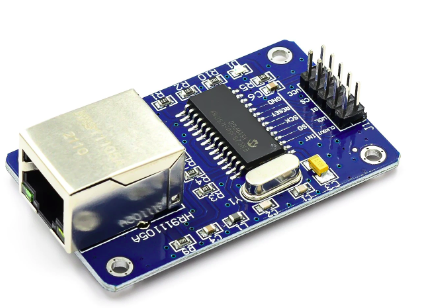
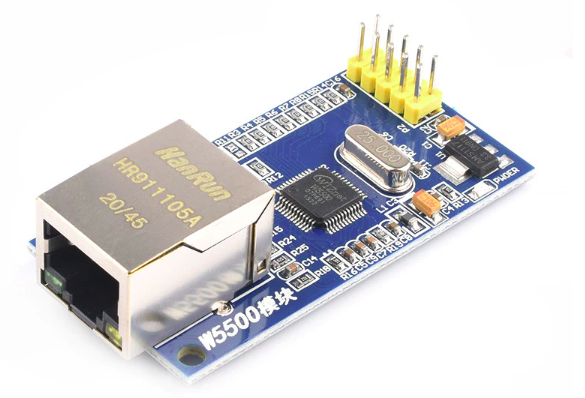
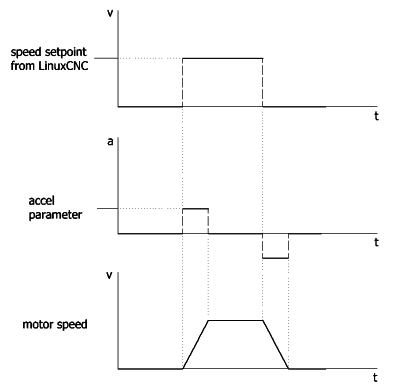
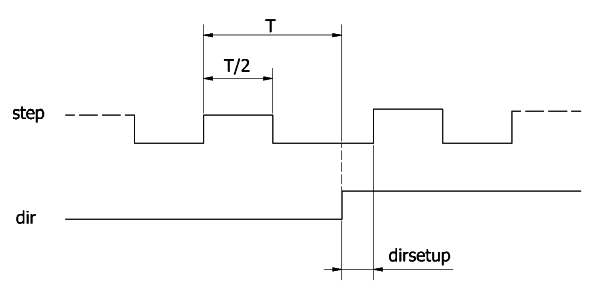
这是一个基于ESP32芯片的高性能实时运动控制开源项目,专门为LinuxCNC数控系统设计。它通过原生RMII以太网或W5500 SPI以太网模块,将ESP32与LinuxCNC连接,充当外部硬件级步进脉冲发生器和IO接口。项目核心解决了普通PC软件方案在高速多轴运动控制中因系统调度延迟导致的脉冲抖动问题,将步进脉冲生成任务完全交给ESP32硬件处理。
标签
项目特点
**实时性强**:利用ESP32的双核处理器和FreeRTOS,实现微秒级的实时控制响应,满足数控加工对时序的苛刻要求。
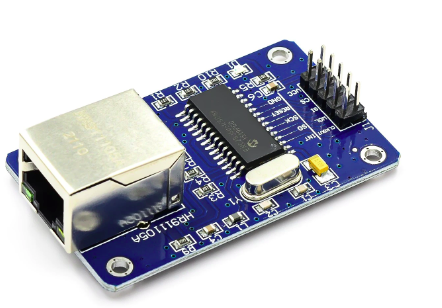
**以太网通信**:通过有线网络与LinuxCNC主机连接,相比USB或并口,抗干扰能力更强,传输距离更远。
**开源且低成本**:基于GPL-3.0开源协议,硬件成本仅需几十元,大幅降低数控系统的入门门槛。
**多轴支持**:可同时控制多达6个步进/伺服电机,支持编码器反馈,适合三轴、四轴甚至五轴机床。
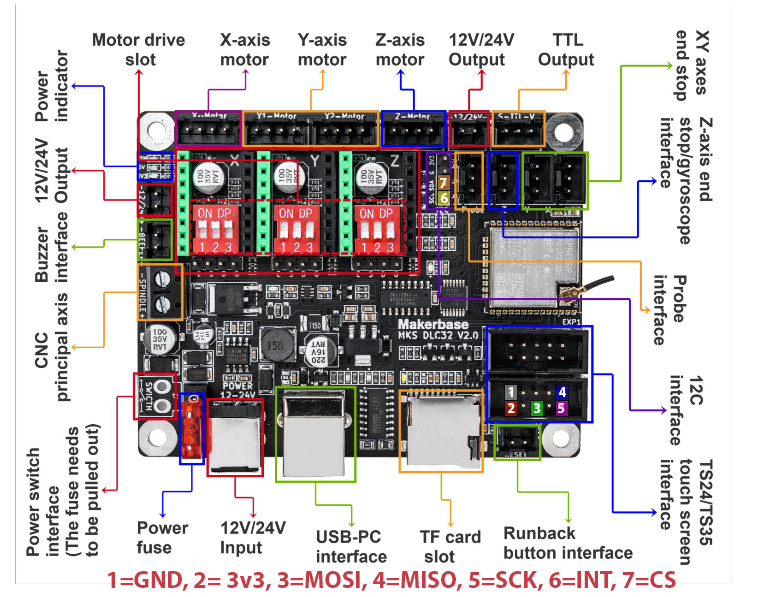
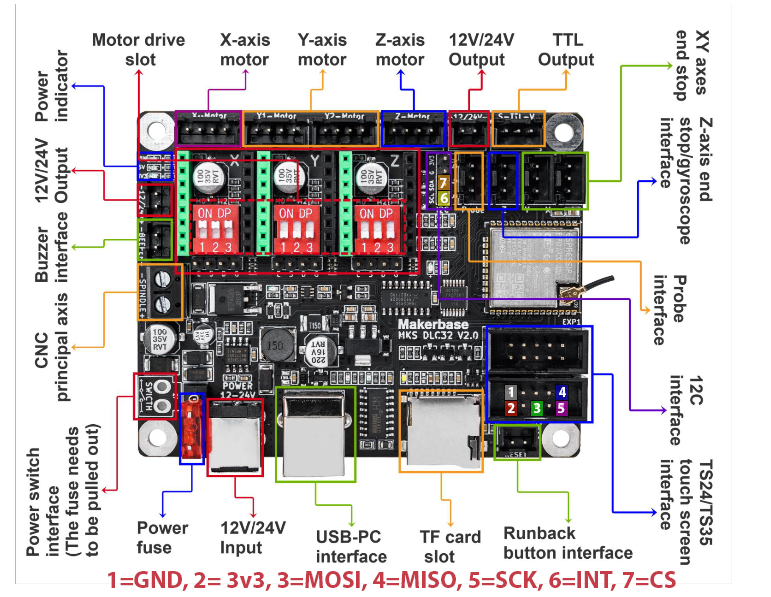
**模块化设计**:硬件接口清晰,支持扩展IO板,方便用户根据实际需求增减输入输出端口。
**兼容LinuxCNC**:直接作为LinuxCNC的硬件驱动层,无需修改上位机软件,即插即用。
技术规格
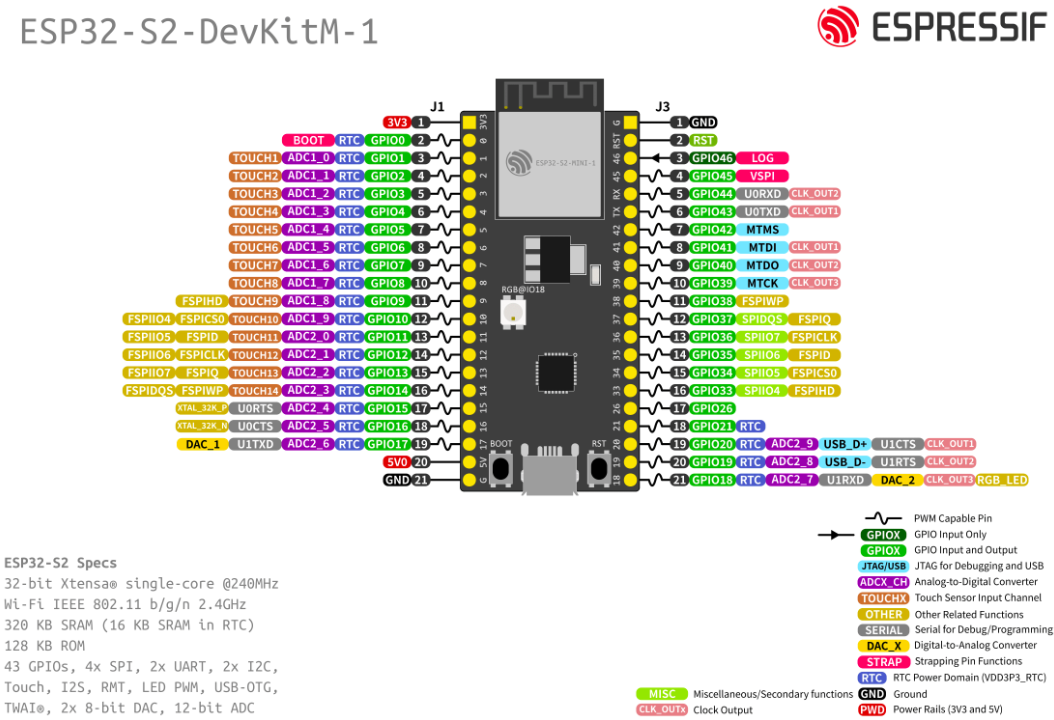
| 主控芯片 | ESP32(双核Xtensa LX6,240MHz) |
|---|---|
| 通信接口 | 100Mbps以太网(通过SPI转W5500) |
| 控制轴数 | 最多6轴(步进/伺服) |
| 脉冲输出频率 | 最高200KHz(每轴) |
| 编码器输入 | 6通道(ABZ差分或单端) |
| 数字输入 | 16路(光耦隔离,24V兼容) |
| 数字输出 | 8路(光耦隔离,MOSFET驱动) |
| 模拟输入 | 2路(0-10V,12位ADC) |
| 供电电压 | 24V DC(主电源),3.3V(逻辑) |
| 工作温度 | -20℃ ~ 85℃ |
| 尺寸 | 100mm x 70mm(参考PCB) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
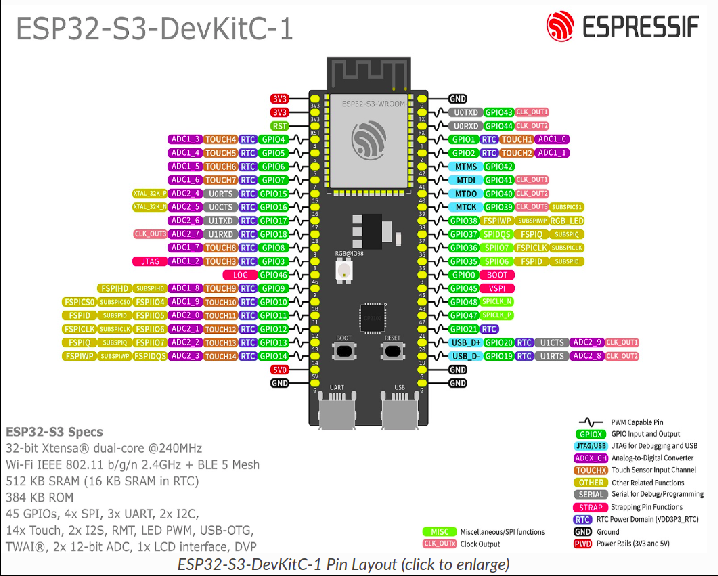
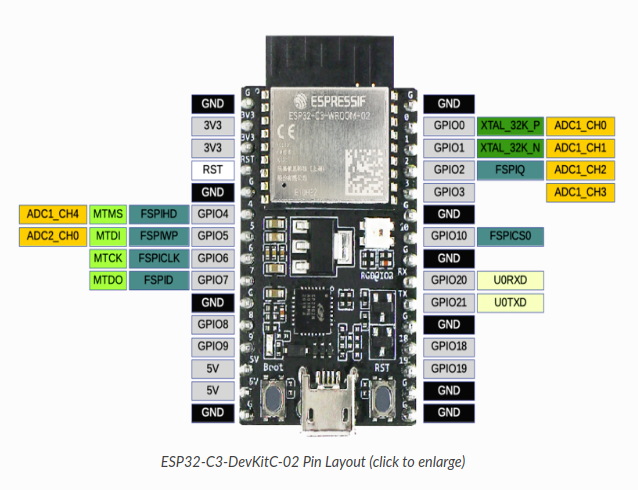
| ESP32开发板(如ESP32-DevKitC) | 1 | — | 推荐带PSRAM版本 |
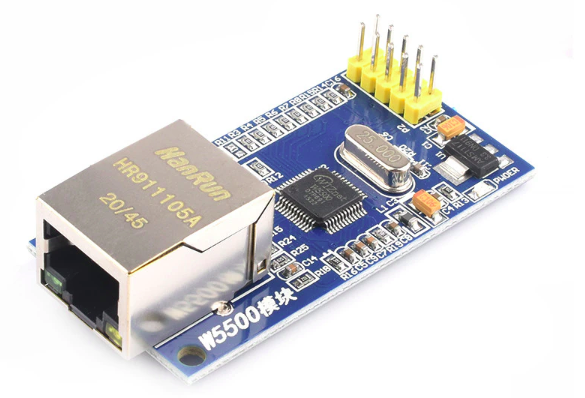
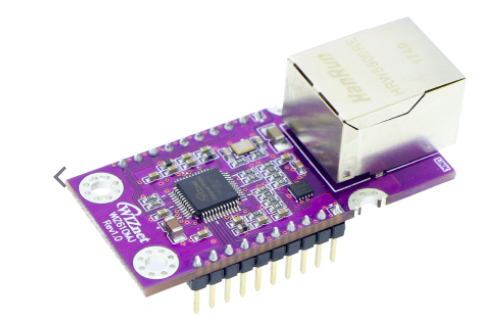
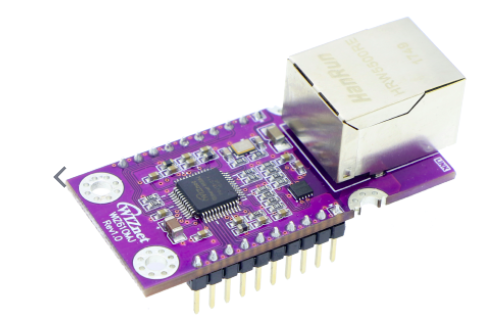
| W5500以太网模块 | 1 | — | SPI接口 |
| 步进电机驱动器(如TB6600) | 1-6 | — | 按轴数配置 |
| 24V/5A开关电源 | 1 | — | 为驱动器和IO供电 |
| 光耦隔离模块(PC817) | 16 | — | 用于数字输入 |
| 光耦隔离模块(TLP521) | 8 | — | 用于数字输出 |
| 接线端子(2P/3P) | 若干 | — | 用于电源和信号接线 |
| 定制PCB板 | 1 | — | 参考仓库Gerber文件 |
| 电阻、电容、LED等 | 若干 | — | 按原理图BOM清单 |
能力画像
**记忆与知识检索**:3/5 — 需要查阅LinuxCNC文档和ESP32编程手册,但核心逻辑已有参考代码。
**动手与操作**:4/5 — 涉及焊接、接线、安装驱动器等硬件操作,需要一定动手能力。
**编程与算法**:3/5 — 需要修改HAL配置文件,理解C语言固件逻辑,但无需从零开发算法。
**设计与建模**:2/5 — 主要使用现成PCB设计,如需定制外壳则需简单3D建模。
**实验与调试**:4/5 — 必须用示波器或逻辑分析仪调试脉冲时序和编码器反馈,排查接线错误。
**协作与分享**:2/5 — 个人项目为主,但可通过GitHub提交Issue或PR参与改进。
**学习与研究**:4/5 — 涉及实时系统、数控原理、电机控制等多个领域,学习价值高。
**系统集成**:4/5 — 需要将ESP32控制器、驱动器、机床本体和LinuxCNC软件整合为一个完整系统。
项目图库


所需技能
基础电子焊接与电路识图能力
熟悉Linux操作系统基本命令行操作
了解步进电机、伺服电机及驱动器接线
能够阅读和修改C语言代码(ESP-IDF或Arduino框架)
掌握LinuxCNC的HAL(硬件抽象层)配置方法
会使用万用表、示波器等调试工具
适用场景
DIY数控雕刻机、激光切割机、等离子切割机
老旧数控机床的电气系统改造升级
教学与科研:实时控制系统、运动控制算法实验
小型工厂或创客空间的低成本自动化设备
需要远程监控和网络化控制的工业边缘节点