ESP32 GPS高度计/升降率计
ESP32_IMU_BARO_GPS_VARIO
ESP32
1/5
已发布

项目简介
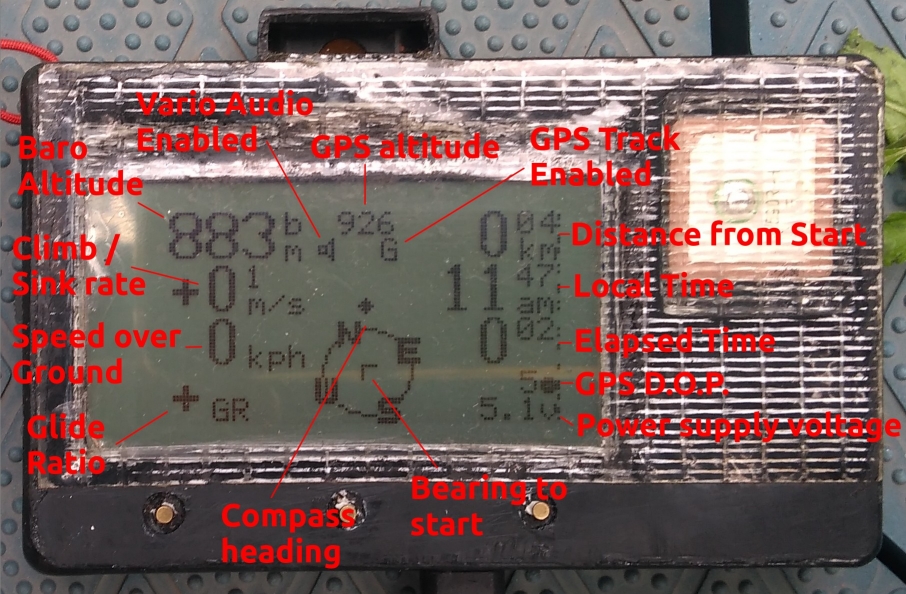
GPS altimeter/variometer with LCD display, routes with waypoints, data/gps track logging, bluetooth NMEA sentence transm
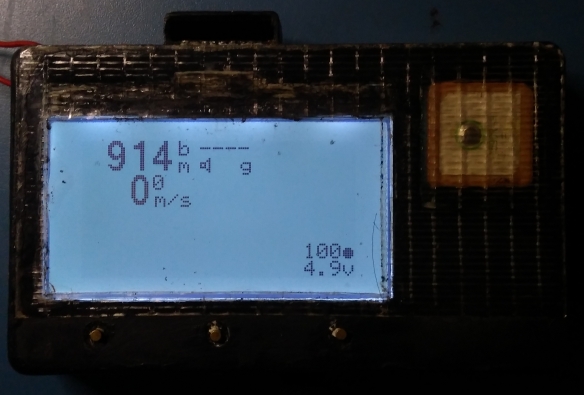
ESP32_IMU_BARO_GPS_VARIO 是一个专为航空运动爱好者设计的开源高度计与升降率计(Vario)项目。它基于 ESP32 微控制器,融合了 IMU(惯性测量单元)、气压计和 GPS 模块的数据,为滑翔伞、悬挂滑翔或无人机飞行提供精准的实时飞行信息。
标签
项目特点
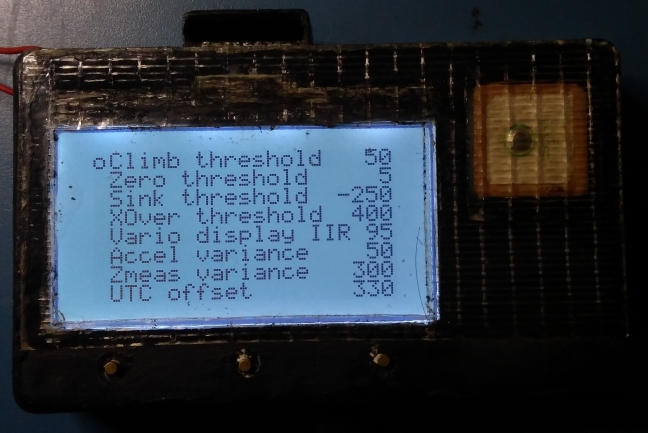
**零延迟升降率响应**:通过卡尔曼滤波器融合IMU和气压计数据,消除传统气压式升降率计的延迟
**高速数据记录**:支持IMU(500Hz)、气压计(50Hz)和GPS(10Hz)数据记录到128Mbit SPI闪存,便于离线分析
**航点导航**:支持最多7个航点路线文件(FormatGEO .wpt格式),可在LCD上导航
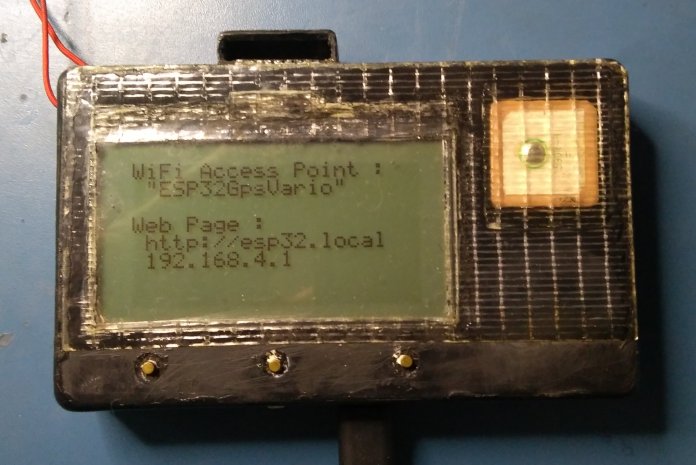
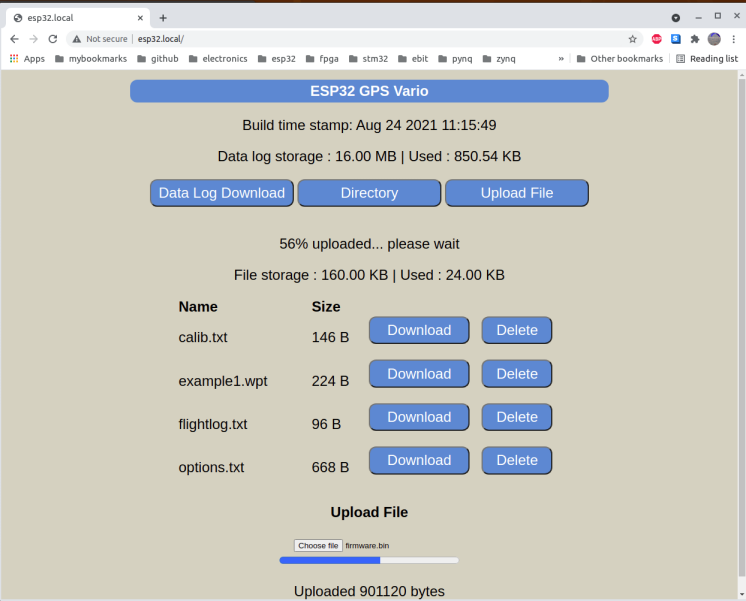
**WiFi网页配置**:设备作为WiFi接入点,可通过浏览器访问网页进行配置和数据下载
**蓝牙NMEA传输**:以最高10Hz频率发送$LK8EX1或$XCTRC NMEA语句,已验证与XCTrack应用兼容
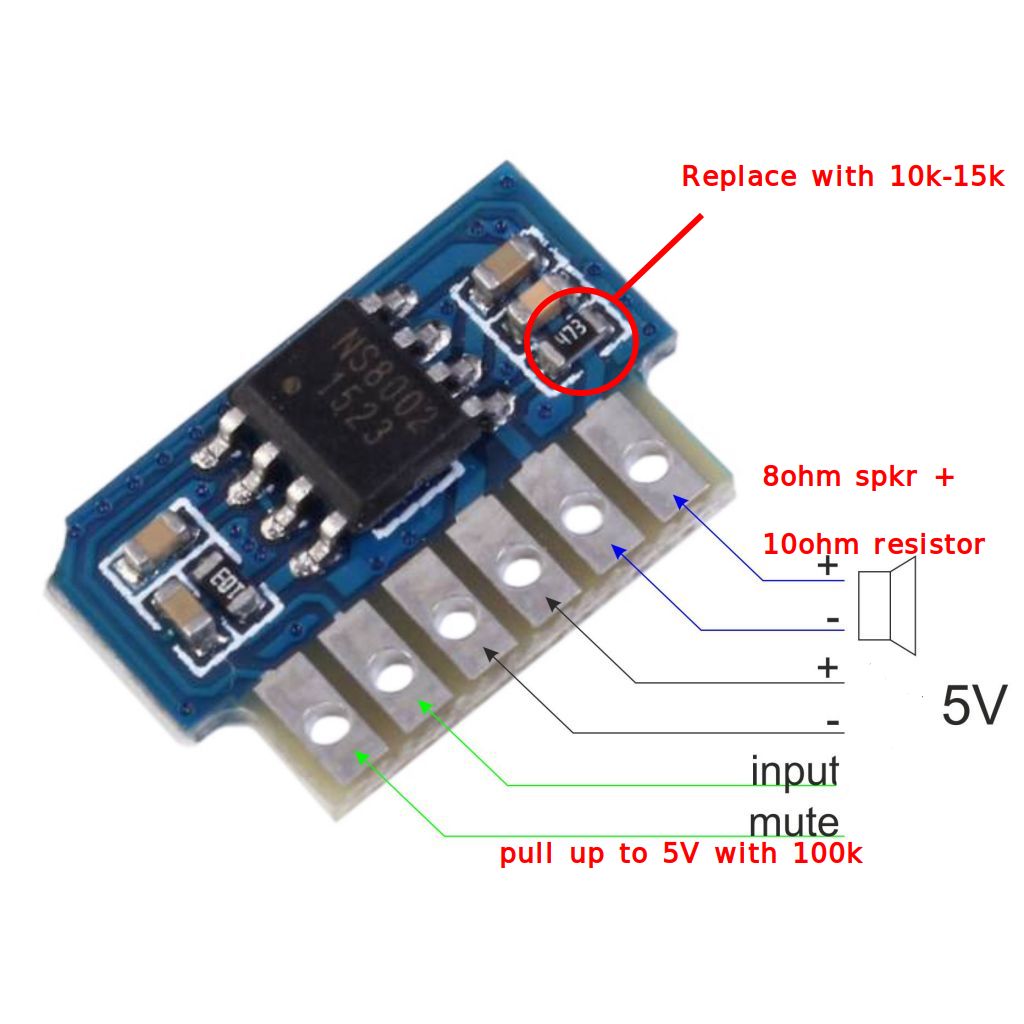
**音频反馈**:使用ESP32 DAC和外部音频放大器驱动8Ω手机扬声器,产生正弦波音调
**飞行摘要记录**:自动生成飞行摘要文件(flightlog.txt),包含日期、时间、坐标、持续时间、最大高度等,可下载为CSV格式
**OTA固件更新**:支持通过WiFi进行无线固件更新
技术规格
| 主控芯片 | ESP32(任何带USB-UART芯片的开发板) |
|---|---|
| IMU传感器 | MPU9250(加速度计+陀螺仪+磁力计),采样率500Hz |
| 气压传感器 | MS5611 或 BMP388,采样率50Hz |
| GPS模块 | Ublox M8N,10Hz数据率,UBX二进制协议,115200波特率 |
| 数据存储 | W25Q128FVSG 128Mbit(16MB)SPI闪存 |
| 显示屏 | 128x64反射式LCD(ST7565控制器),SPI接口 |
| 音频输出 | NS8002音频放大器 + 8Ω手机扬声器 |
| 电源 | USB 5V输出移动电源 |
| 电流消耗 | <100mA(升降率计模式+蓝牙),<150mA(WiFi接入点模式) |
| 蓝牙 | 蓝牙经典(SPP),NMEA语句传输 |
| WiFi | 802.11 b/g/n,接入点模式,网页服务器 |
| 固件更新 | OTA无线更新 |
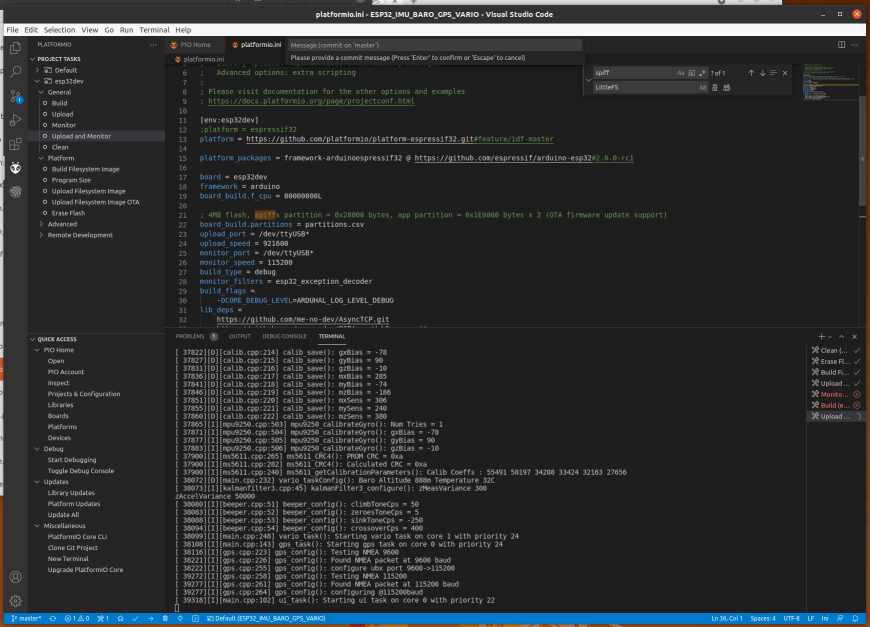
| 开发环境 | Visual Studio Code + PlatformIO,Arduino框架 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| ESP32开发板(带USB-UART芯片) | 1 | — | 如CH340、CP2102等 |
| MPU9250模块(加速度计+陀螺仪+磁力计) | 1 | — | 或CJMCU-117模块 |
| MS5611或BMP388气压传感器 | 1 | — | 推荐MS5611 |
| Ublox M8N GPS模块(10Hz) | 1 | — | 仅支持GPS星座,非多星座 |
| W25Q128FVSG 128Mbit SPI闪存 | 1 | — | 16MB |
| 128x64反射式LCD(ST7565) | 1 | — | SPI接口 |
| NS8002音频放大器模块 | 1 | — | 需修改电阻 |
| 8Ω手机扬声器 | 1 | — | |
| USB 5V移动电源 | 1 | — | |
| 0.5A自恢复保险丝 | 1 | — | |
| 470μF 10V电解电容 | 1 | — | |
| 10k-15k电阻 | 1 | — | 替换NS8002的47k电阻 |
| 100k电阻 | 1 | — | NS8002使能引脚上拉 |
| CR2032电池 | 1 | — | 替代GPS模块上的超级电容 |
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 3/5
⚪ 数理与计算: 4/5
⚪ 动手与操作: 4/5
⚪ 狂热与坚持: 4/5
⚪ 创造与创新: 3/5
项目图库

所需技能
🔧 **动手能力**:需要焊接和组装电子模块,制作PCB转接板,修改电路(如替换GPS模块的超级电容为CR2032电池),调试硬件连接
💻 **编程能力**:需要掌握C/C++编程,熟悉Arduino框架和PlatformIO开发环境,理解ESP32的WiFi、蓝牙、SPI、I2C等外设编程
⚡ **电子电路**:需要理解3.3V/5V电平转换、I2C/SPI通信协议、音频放大器电路、电源管理(保险丝、电容滤波)等基础知识
适用场景
**滑翔伞/悬挂滑翔**:为飞行员提供实时高度、升降率、地速、航向等飞行数据
**无人机/航模**:作为高度计和升降率计,辅助飞行控制和导航
**户外运动**:徒步、登山等场景下的高度和轨迹记录
**数据采集与分析**:高速IMU和气压计数据记录,用于算法开发和验证
**教育与研究**:学习卡尔曼滤波、传感器融合、嵌入式系统开发