开源机械臂
Robot-Arm
机械臂
3/5
🧩 软硬件结合
已发布
项目简介
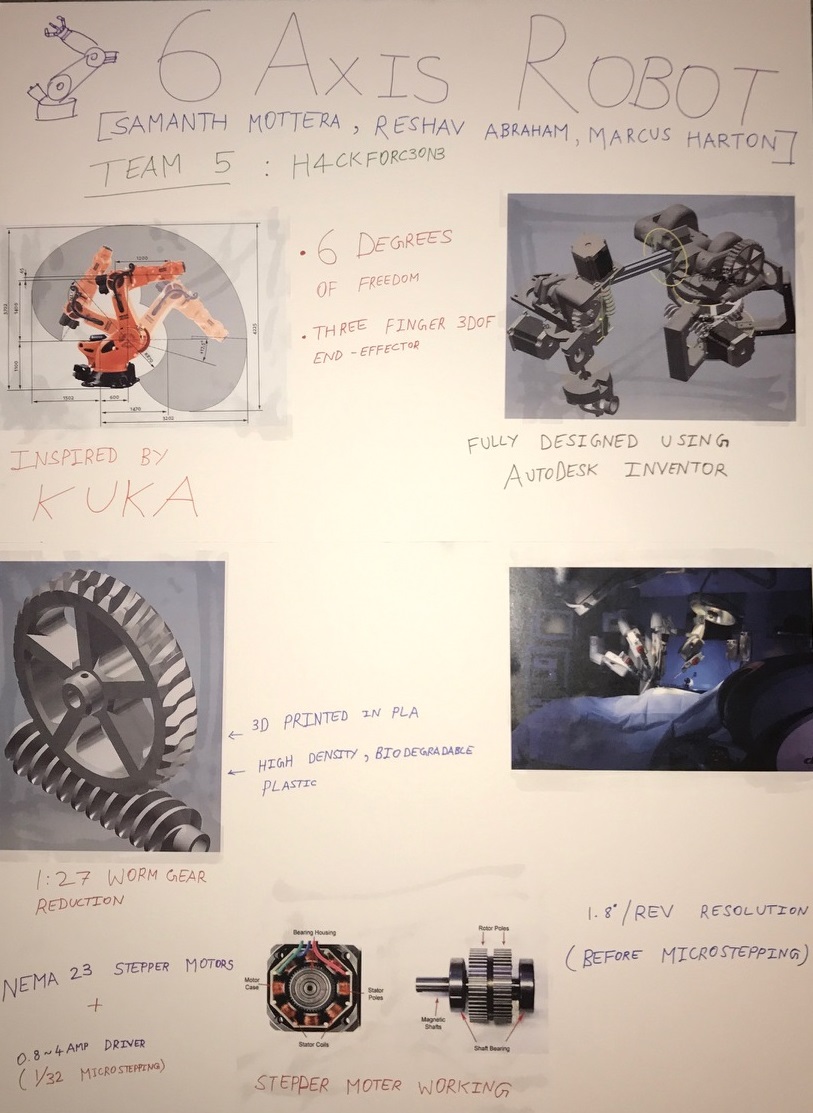
6自由度开源机械臂,可拆卸末端执行器,PLA打印。
6自由度开源机械臂,配备可拆卸末端执行器。大部分部件采用PLA材料3D打印,填充率30%-50%。全部使用Autodesk Inventor 2017设计。
项目特点
6自由度设计,运动灵活,可完成复杂抓取和操作任务
可拆卸末端执行器,支持更换不同工具(如夹爪、吸盘等)
大部分结构件采用PLA 3D打印,成本低、易于复制和修改
开源设计,提供完整的CAD模型、电路图和固件代码
基于常见的微控制器(如Arduino)和舵机驱动,易于上手
技术规格
| 自由度 | 6 DoF |
|---|---|
| 驱动方式 | 舵机(Servo) |
| 结构材料 | PLA 3D打印件 |
| 控制板 | Arduino Mega 或类似 |
| 末端执行器 | 可拆卸,支持多种工具 |
| 电源 | 5V/6V 外部电源 |
| 通信接口 | USB串口 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 3D打印部件(PLA) | 1套 | — | 约20-30个零件 |
| MG996R舵机 | 6 | — | 或类似型号 |
| Arduino Mega 2560 | 1 | — | 或兼容板 |
| PCA9685舵机驱动板 | 1 | — | 可选,用于PWM控制 |
| 5V/6V 5A电源适配器 | 1 | — | 为舵机供电 |
| M3螺丝、螺母、垫片 | 1套 | — | 用于组装 |
| 3D打印夹爪 | 1 | — | 可自行设计替换 |
3D 模型
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
🔵 数理与计算: 3/5
🔵 动手与操作: 4/5
⚪ 狂热与坚持: 3/5
🔵 创造与创新: 3/5
项目图库



所需技能
🔧 **动手能力**:需要熟练使用3D打印机、组装机械结构、焊接电子元件。
💻 **编程能力**:需要掌握Arduino编程(C/C++),了解串口通信和舵机控制。
⚡ **电子电路**:需要了解舵机驱动、电源分配、基本电路连接。
适用场景
机器人技术教学与实验平台
创客空间中的自动化演示项目
小型物品抓取与搬运任务
作为更复杂机器人项目(如视觉抓取)的硬件基础