JetBot
jetbot
仿真
1/5
🧩 软硬件结合
已发布

项目简介
基于NVIDIA Jetson Nano的教育AI机器人。
JetBot 是一个基于 NVIDIA Jetson Nano 的开源机器人项目,旨在以极低的成本(Jetson Nano 的附加组件不到 150 美元)让 AI 机器人技术变得触手可及。它的核心定位是“平价、教育、有趣”——用户无需昂贵的硬件或深厚的专业知识,就能从零开始构建一个具备人工智能能力的移动机器人。项目提供了从基础运动控制到基于深度学习的避障等系列教程,所有交互都可以通过网页浏览器完成,极大降低了入门门槛。技术栈方面,JetBot 主要依托 NVIDIA Jetson Nano 的 GPU 算力,运行 Python 编写的控制程序,并利用 PyTorch 等框架实现图像识别、目标跟踪等 AI 功能。它解决了传统机器人开发中硬件成本高、软件环境复杂、缺乏系统性学习路径的问题,特别适合 AI 爱好者、教育工作者、创客以及希望快速验证 AI 算法的研究人员。无论是用于课堂教学中的 AI 实践、个人学习计算机视觉与机器人控制,还是作为原型平台进行创新实验,JetBot 都能提供一个稳定、可扩展的起点。此外,项目拥有活跃的社区支持,用户可以通过 GitHub Discussions 和 NVIDIA 开发者论坛交流经验、分享项目,形成持续迭代的生态。
项目特点
**经济实惠**:作为 Jetson Nano 的附加组件,成本低于 150 美元。
**教育性强**:提供从基础运动到 AI 避障的完整教程。
**趣味性高**:可通过网页浏览器进行交互式编程,即时看到效果。
**开源**:所有硬件设计、软件代码和教程均开源,方便学习和修改。
技术规格
| 主控制器 | NVIDIA Jetson Nano |
|---|---|
| 成本 | 低于 150 美元(附加组件) |
| 编程方式 | 基于 Web 浏览器的交互式编程 |
| 核心功能 | 基础运动控制、AI 碰撞避免 |
| 目标用户 | 学生、教育工作者、AI 爱好者 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| NVIDIA Jetson Nano | 1 | — | 核心计算平台 |
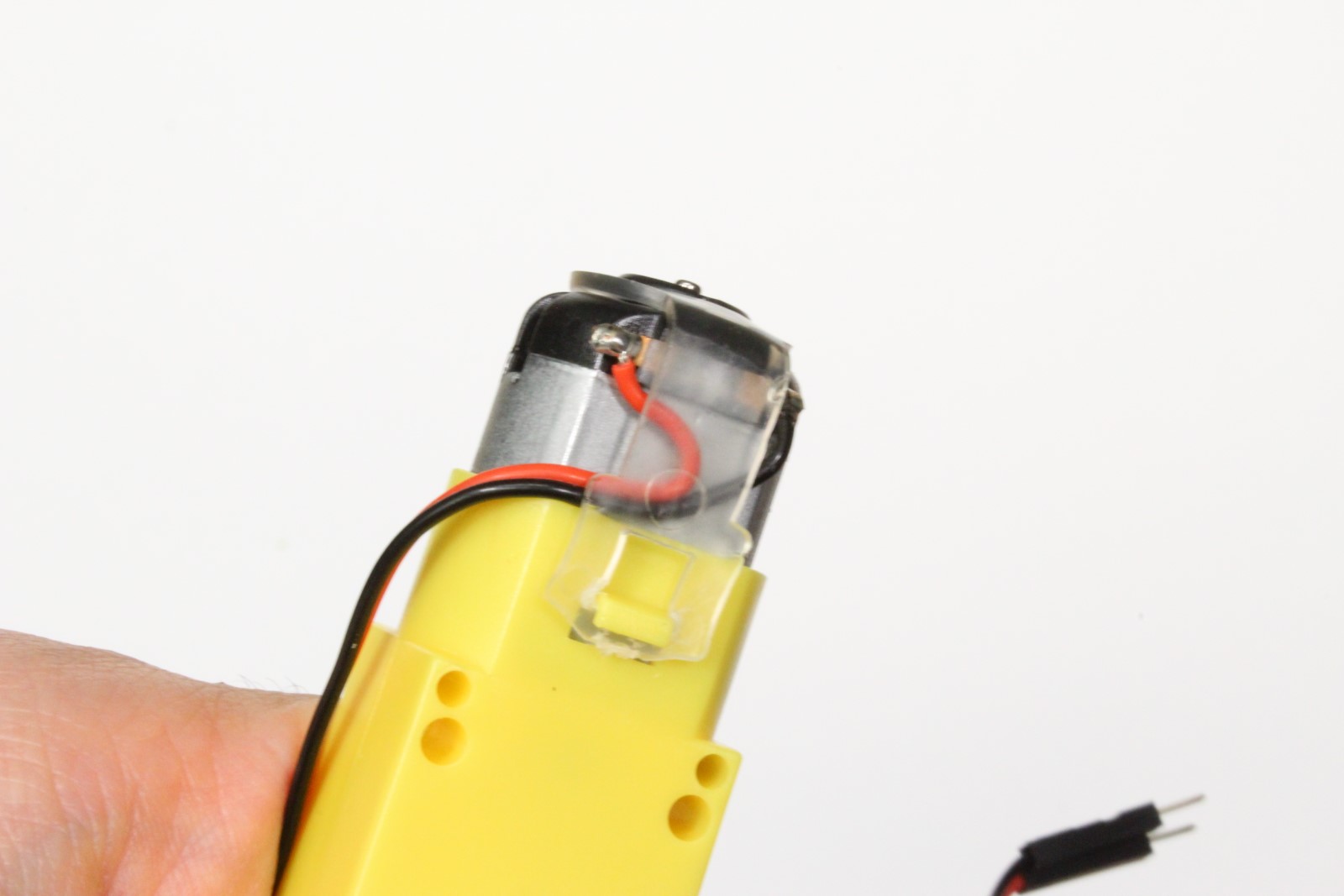
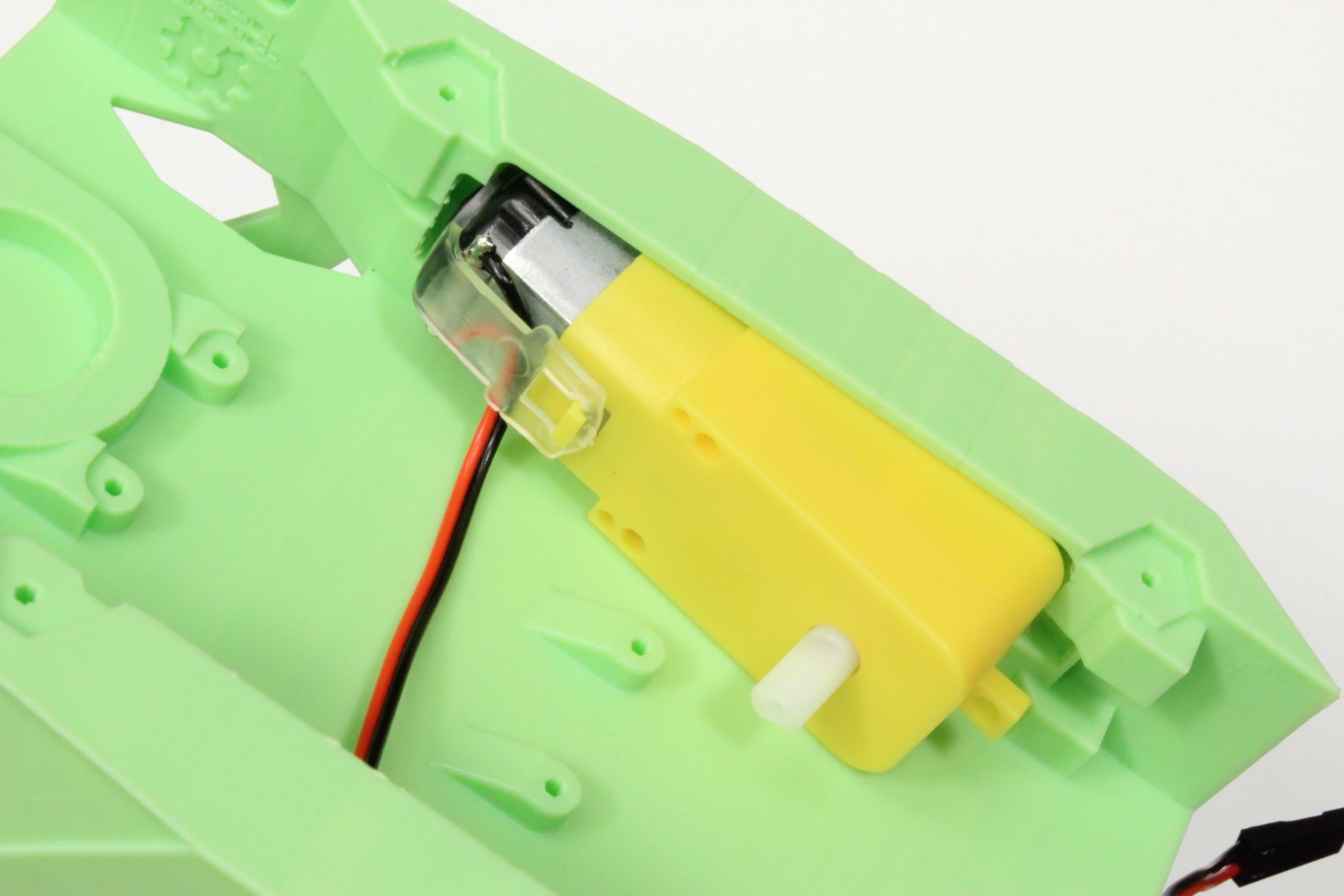
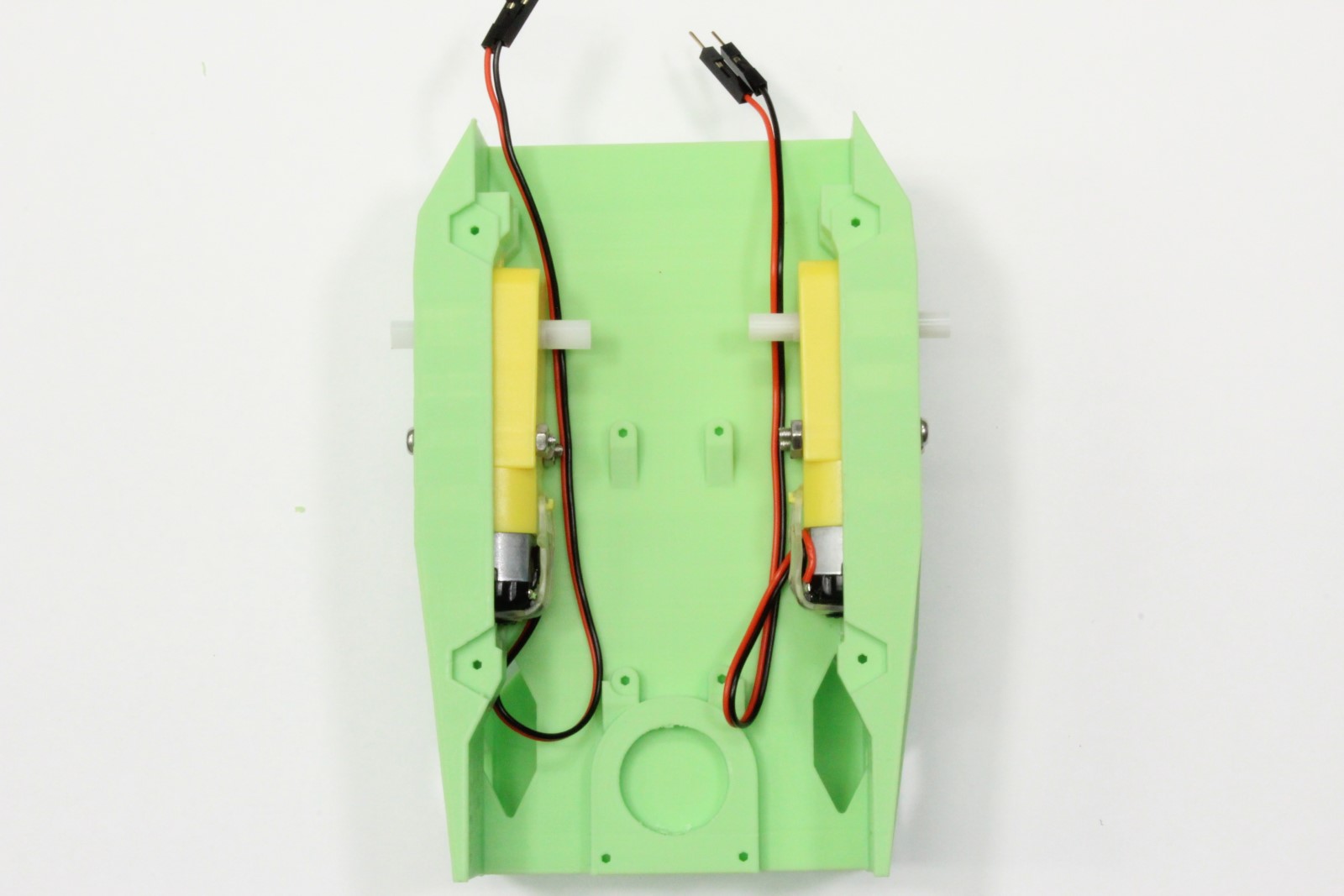
| 直流减速电机 | 2 | — | 驱动车轮 |
| 机器人车轮 | 2 | — | 标准尺寸 |
| USB 摄像头或 CSI 摄像头 | 1 | — | 用于视觉感知 |
| 锂电池组 | 1 | — | 为 Jetson Nano 供电 |
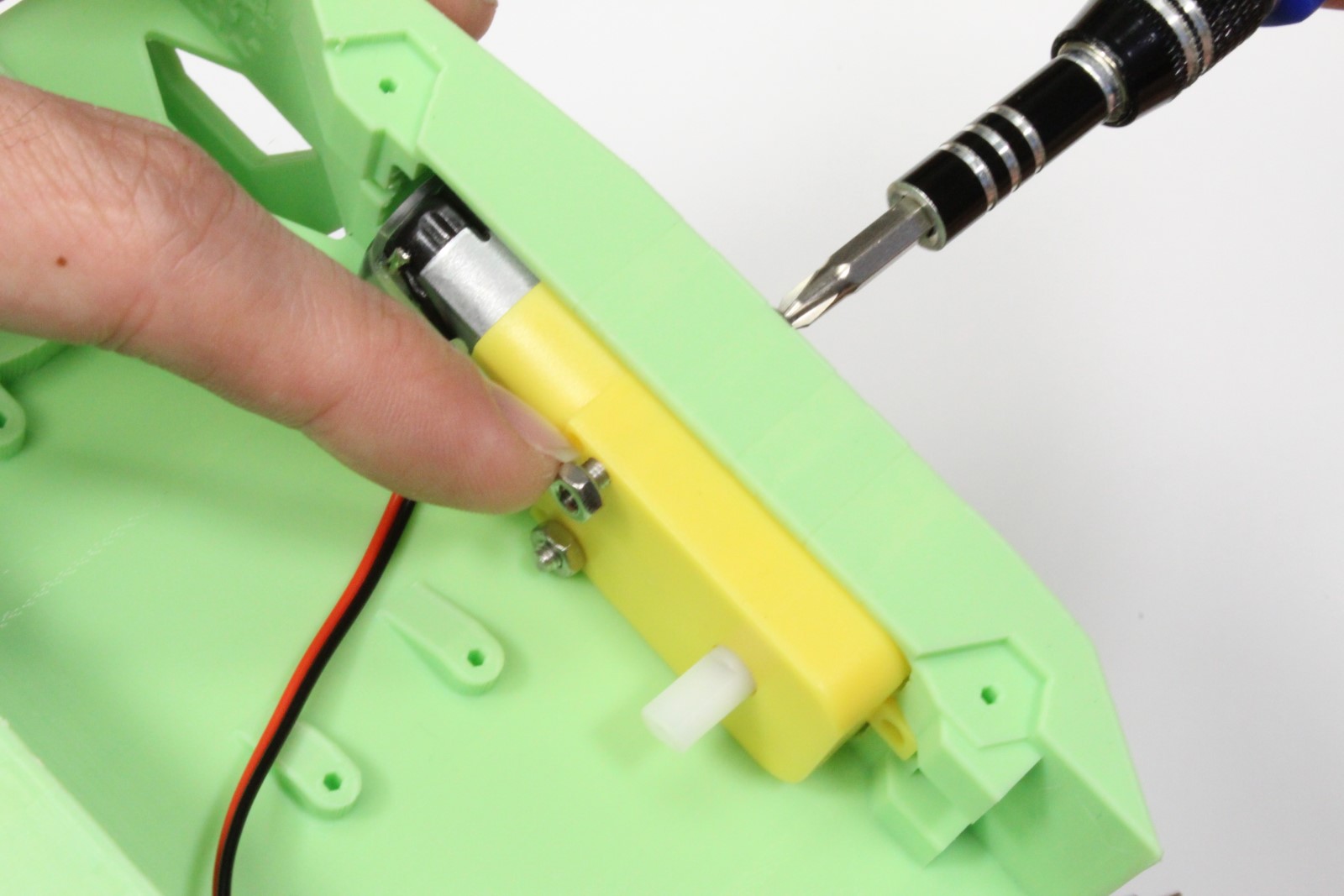
| 亚克力或 3D 打印底盘 | 1 | — | 承载所有组件 |
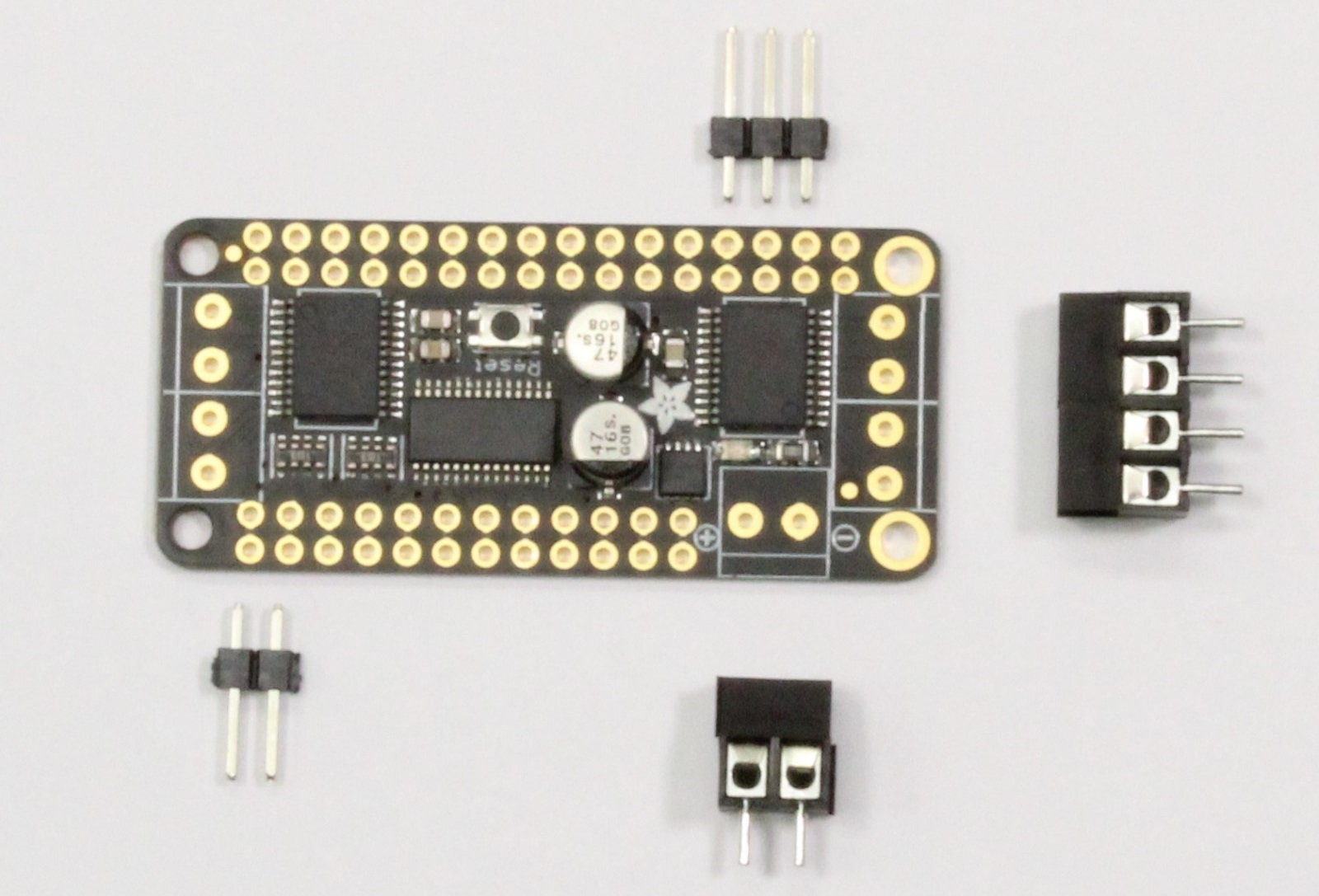
| 电机驱动模块 | 1 | — | 控制电机转动 |
3D 模型
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
⚪ 数理与计算: 3/5
⚪ 动手与操作: 4/5
⚪ 狂热与坚持: 3/5
⚪ 创造与创新: 3/5
项目图库







所需技能
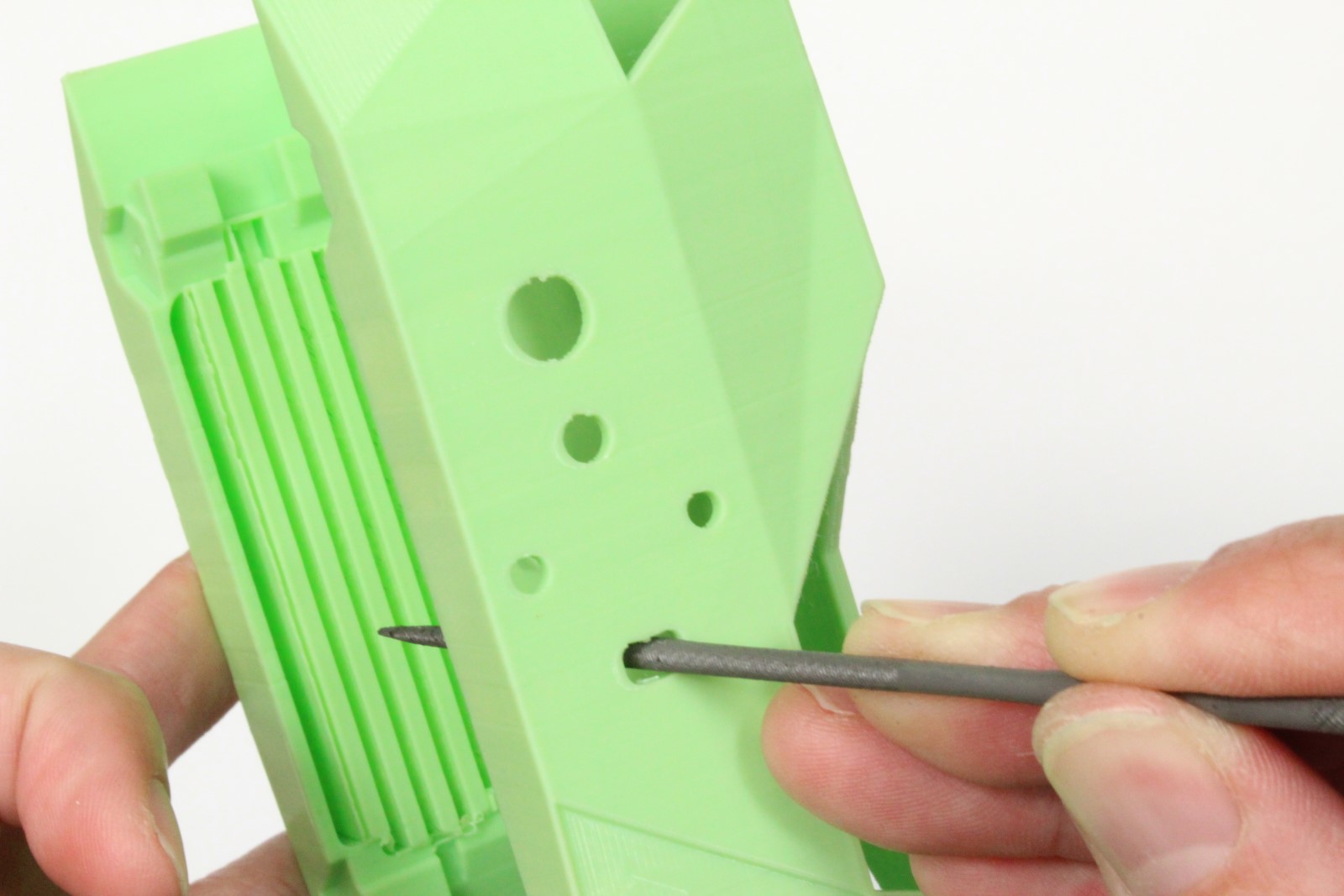
🔧 **动手能力**:需要组装机器人底盘、连接电机和传感器,具备基本的电子焊接和机械组装能力。
💻 **编程能力**:需要 Python 编程基础,了解 Linux 命令行操作,能够运行和修改 Jupyter Notebook 教程。
⚡ **电子电路**:需要了解基本的电路连接,如电机驱动、电源管理和传感器接口。
适用场景
**AI 教育**:作为高校或培训机构的人工智能课程实践平台,帮助学生理解 AI 在机器人中的应用。
**个人学习**:适合对 AI 和机器人感兴趣的爱好者,通过动手实践掌握 Jetson Nano 和 AI 模型部署。
**原型开发**:可作为 AI 机器人原型开发的基础平台,快速验证碰撞避免、目标跟踪等算法。