粒子滤波器定位
particle_filter
机器人电机驱动板
1/5
🧩 软硬件结合
已发布

项目简介
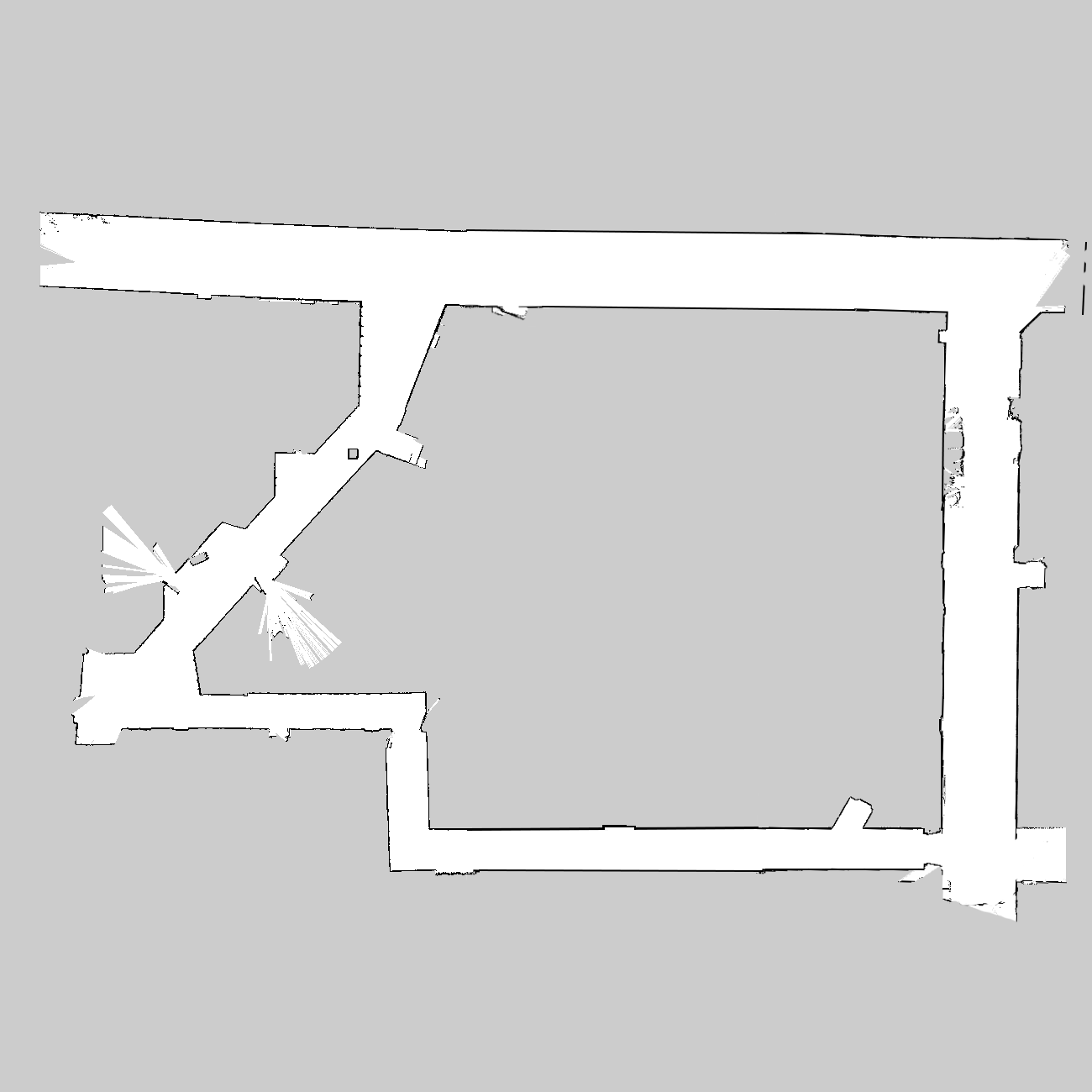
MIT Racecar的快速粒子滤波定位算法,使用RangeLibc加速光线投射。
这是一个基于蒙特卡洛定位(MCL)算法的粒子滤波定位开源项目,专为RACECAR机器人平台设计,旨在解决室内环境中移动机器人的高精度位姿估计问题。项目核心功能是通过粒子滤波算法,结合里程计数据和激光雷达扫描数据,在已知栅格地图上实时估算机器人的位置和姿态。
项目特点
**高效定位**:采用MCL算法,并利用RangeLibc库进行快速光线投射,实现实时定位。
**ROS集成**:作为ROS包提供,与map_server、RViz等标准ROS工具无缝集成。
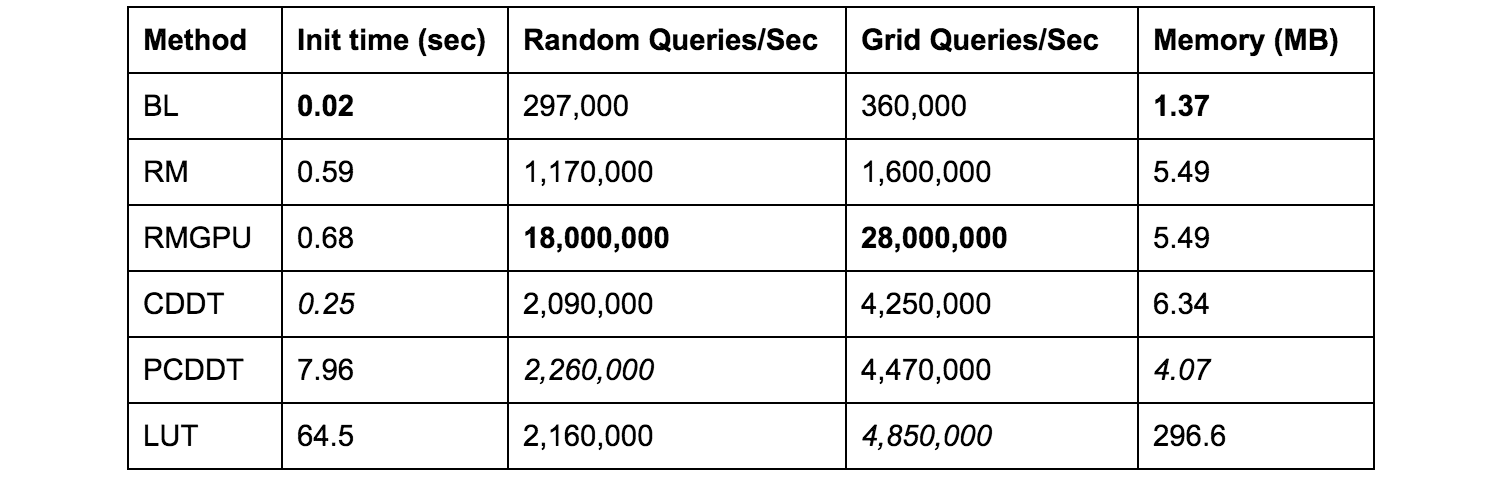
**多种光线投射方法**:支持多种RangeLibc光线投射方法(如cddt, glt, rmgpu),用户可根据硬件(CPU/GPU)选择最优方案。
**参数可配置**:通过launch文件可灵活调整里程计、激光扫描话题等关键参数。
**附带教学文档**:项目包含详细的数学推导和实验指南,适合学习和研究。
技术规格
| 算法 | 蒙特卡洛定位(MCL) |
|---|---|
| 编程语言 | Python |
| 核心依赖 | ROS (Kinetic), Numpy, RangeLibc |
| 光线投射库 | RangeLibc (支持CPU/GPU) |
| 可视化工具 | RViz |
| 输入 | 里程计数据、激光雷达扫描数据、地图 |
| 输出 | 机器人位姿估计(PoseWithCovariance) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| MIT RACECAR | 1 | — | 或兼容的ROS机器人平台 |
| 激光雷达 | 1 | — | 提供2D扫描数据 |
| 里程计 | 1 | — | 提供机器人运动估计 |
| 车载计算机(如NVIDIA Jetson) | 1 | — | 运行ROS和算法 |
| ROS Kinetic | 1 | — | 机器人操作系统 |
| RangeLibc | 1 | — | 光线投射加速库 |
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
🔵 数理与计算: 4/5
🔵 动手与操作: 3/5
⚪ 狂热与坚持: 2/5
⚪ 创造与创新: 3/5
项目图库

所需技能
🔧 **动手能力**:需要组装和配置RACECAR或类似的ROS机器人平台,包括传感器安装和网络配置。
💻 **编程能力**:需要Python编程基础,理解ROS节点、话题和服务,能够修改launch文件和参数。
⚡ **电子电路**:无需深入电子知识,但需要了解如何连接和配置激光雷达等传感器。
适用场景
**机器人定位研究**:作为MCL算法的参考实现,用于学术研究和算法对比。
**自动驾驶课程实验**:MIT RACECAR课程的配套代码,适合教学和实验。
**ROS机器人开发**:为需要2D定位功能的ROS机器人项目提供现成解决方案。