linorobot2
linorobot2
AI视觉
1/5
🧩 软硬件结合
已发布

项目简介
自主移动机器人(2WD,4WD,麦克纳姆轮驱动)
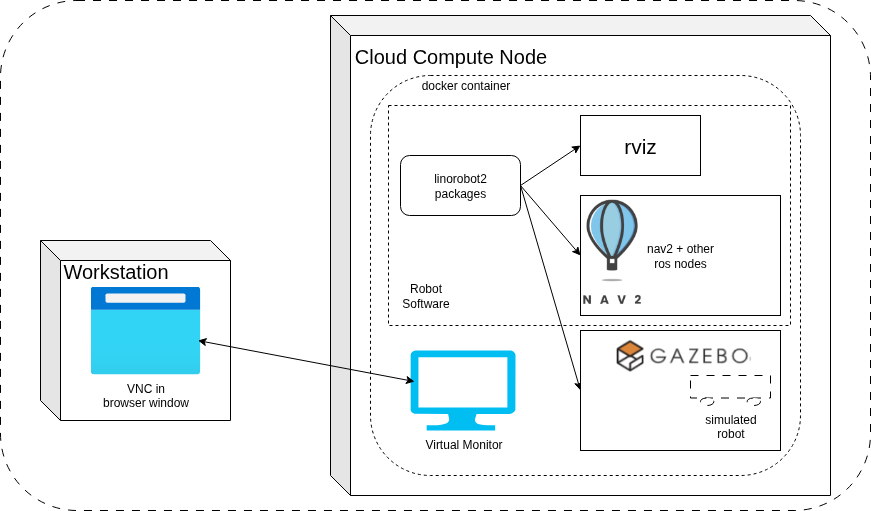
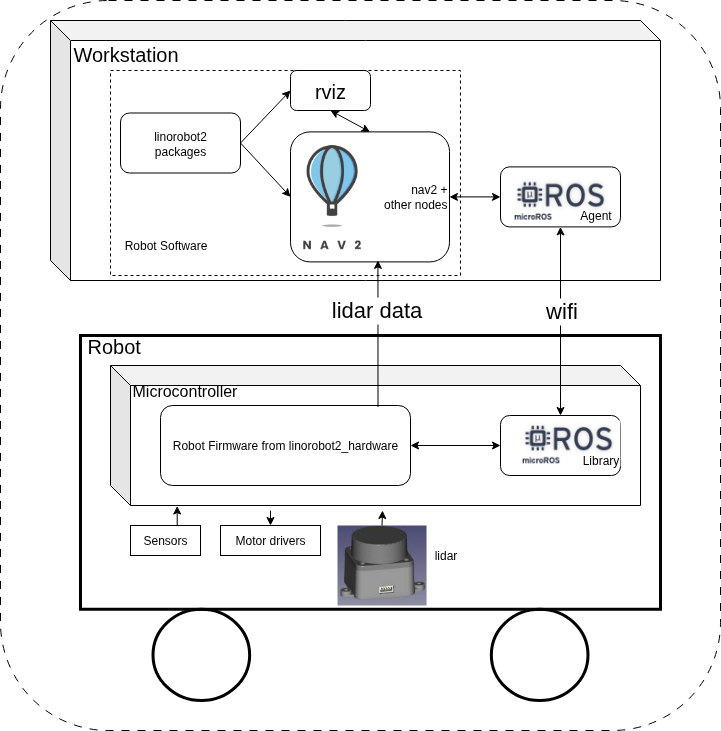
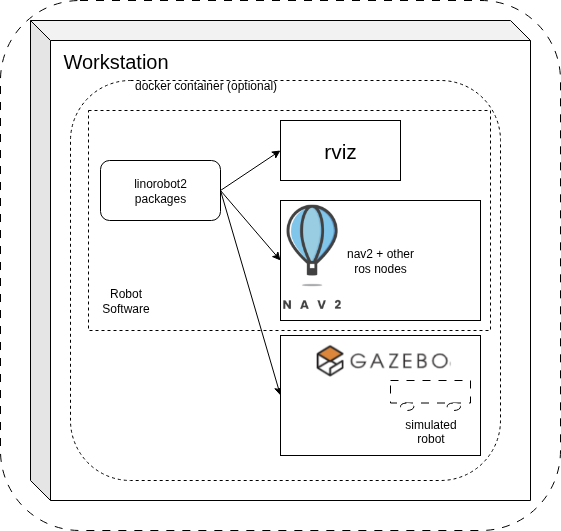
linorobot2 是一个基于 ROS 2 的开源机器人软件包,旨在帮助开发者从零开始快速搭建具备自主导航能力的移动机器人。无论你是用现成零件组装实体机器人,还是在 Gazebo 仿真环境中学习 Nav2,或是为新型硬件做原型验证,linorobot2 都能提供一套开箱即用的完整基础框架。
标签
项目特点
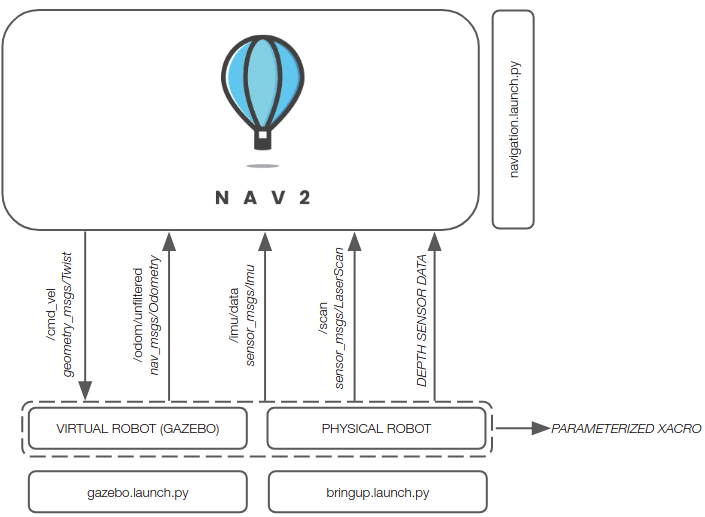
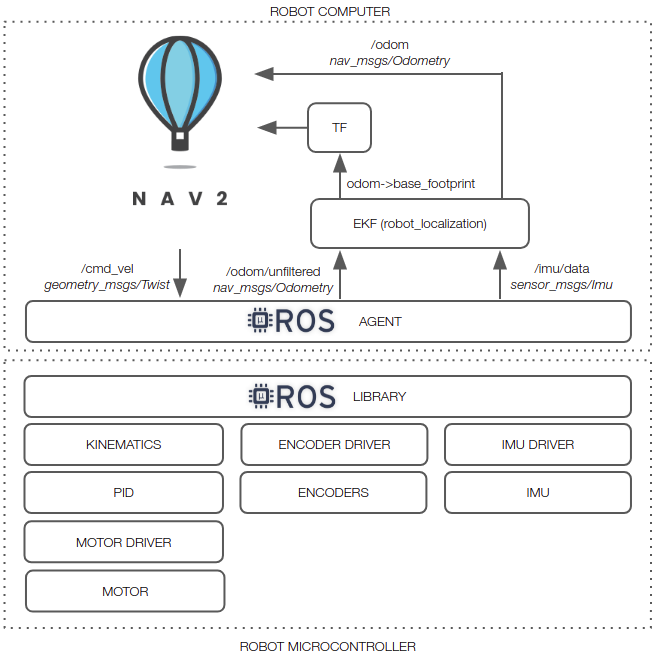
**预集成导航栈**:Nav2、SLAM Toolbox 和 robot_localization EKF 已配置好,真实机器人和仿真使用相同的 YAML 配置文件。
**多底盘支持**:原生支持 2WD、4WD 和麦克纳姆轮底盘。
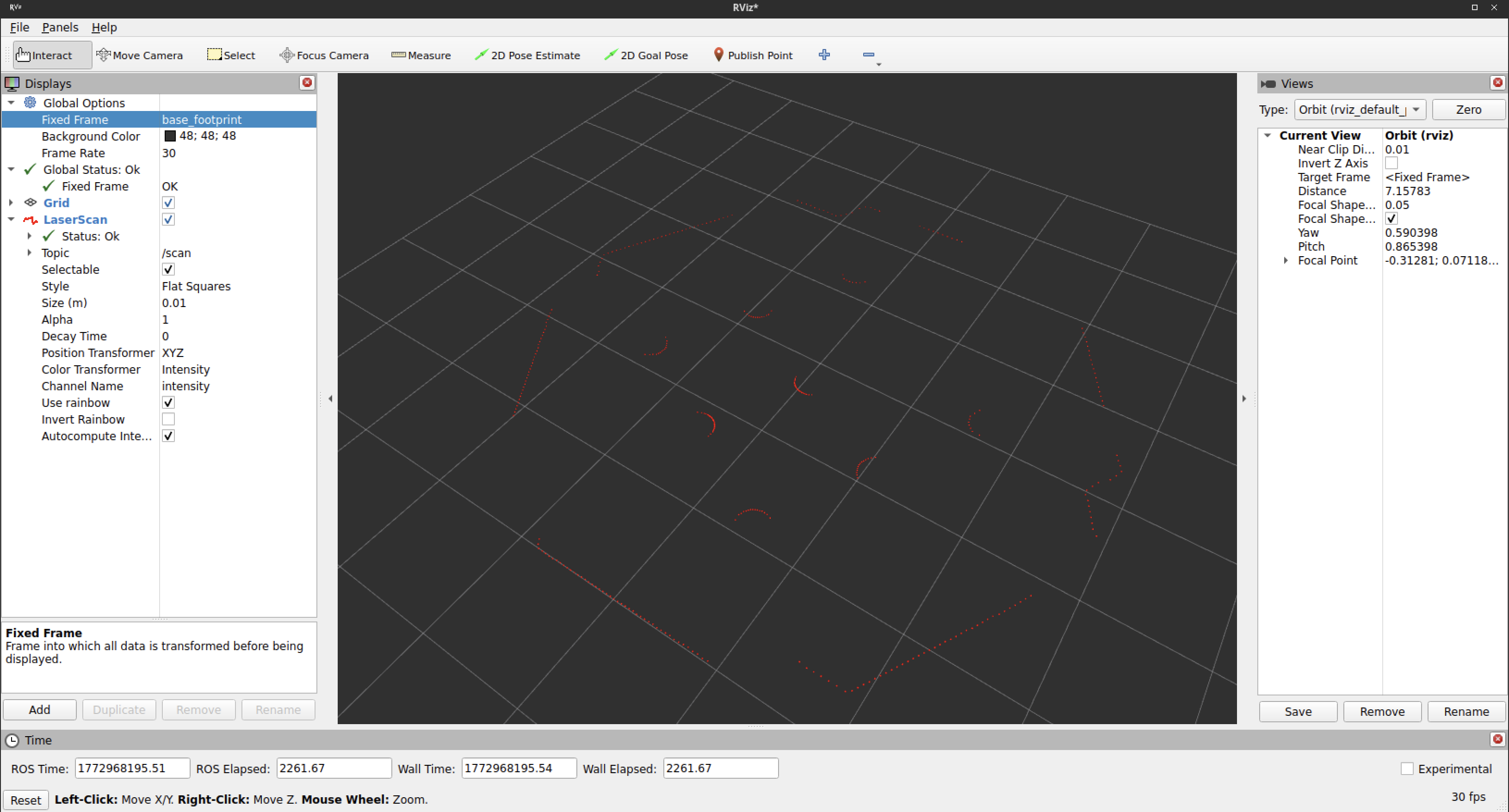
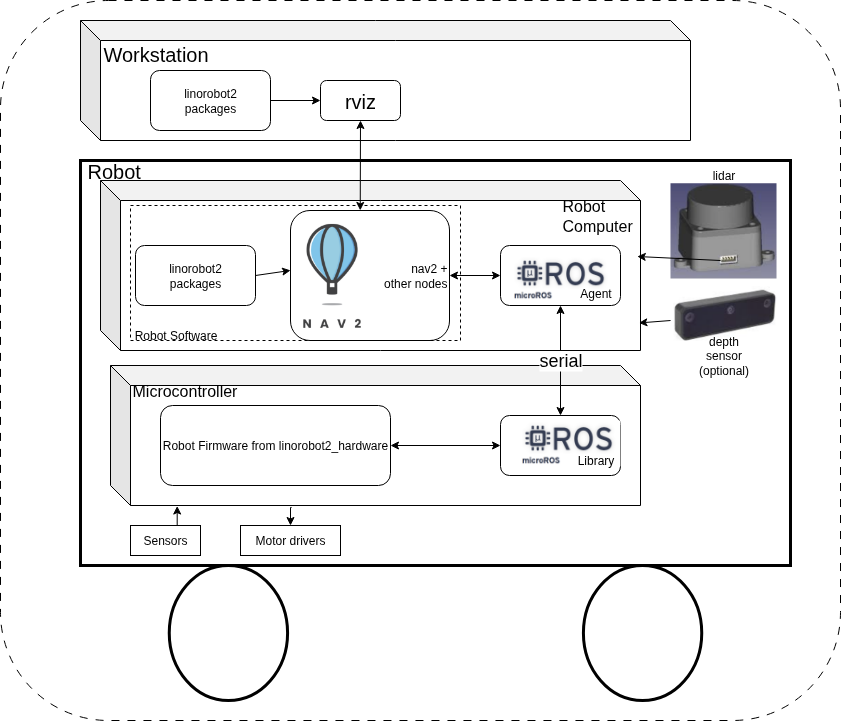
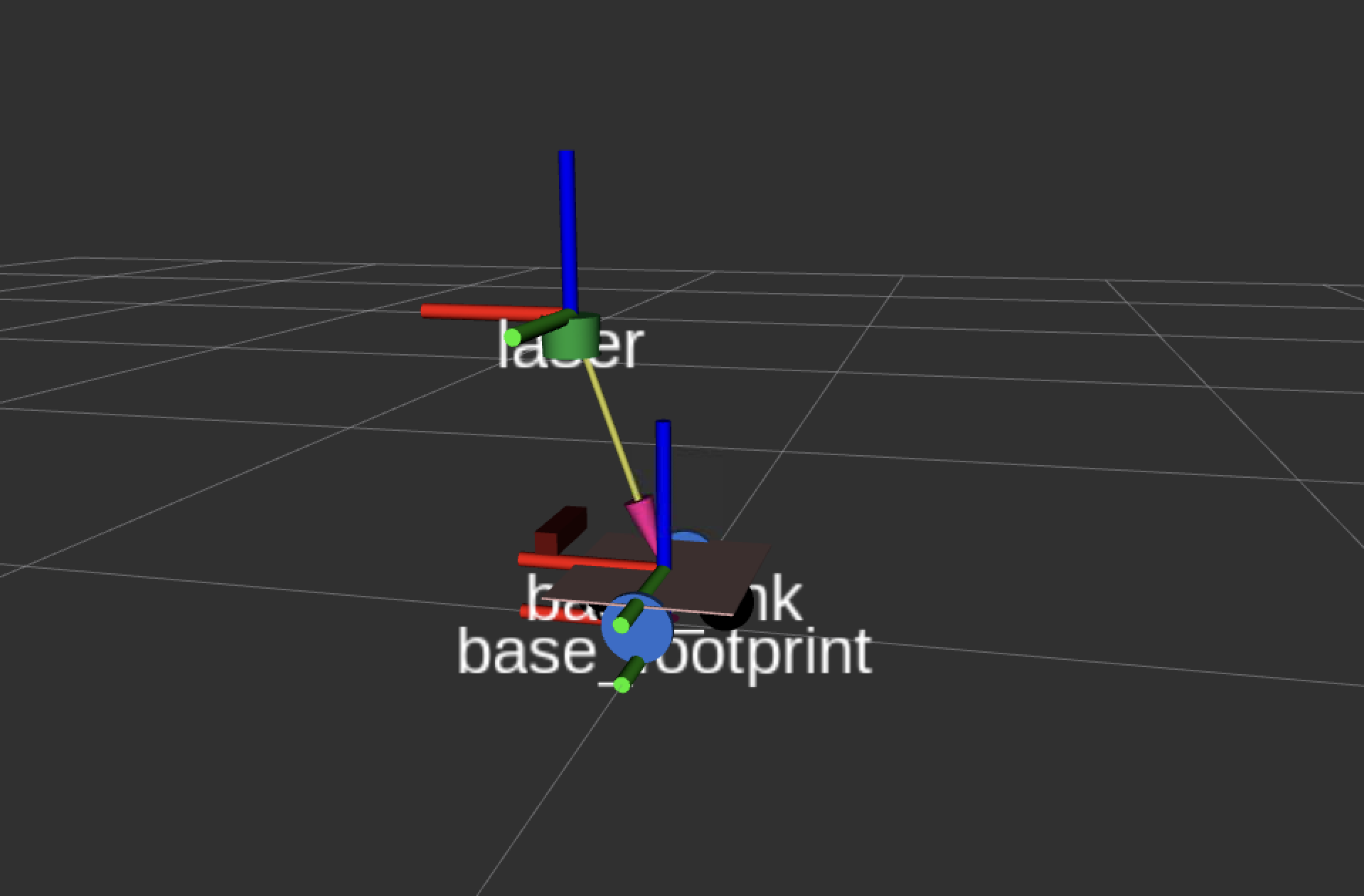
**丰富的传感器支持**:支持多种 2D 激光雷达(如 RPLIDAR、LD06、YDLIDAR 等)和深度相机(如 Intel RealSense、ZED、OAK-D 等)。
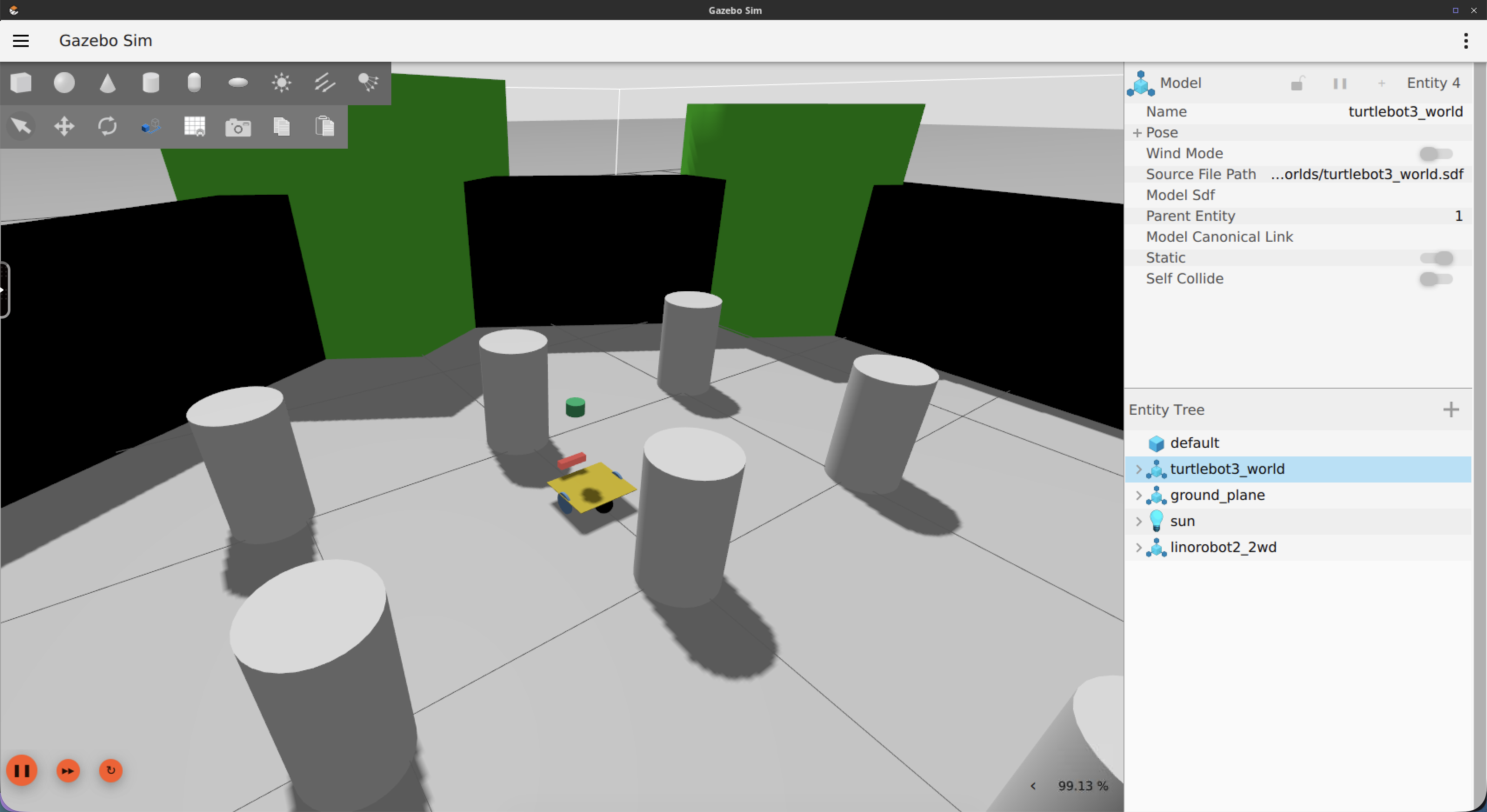
**真实环境仿真**:提供 `image_to_gazebo` 和 `create_worlds_from_maps` 工具,可将平面图或 SLAM 地图转换为 Gazebo 仿真世界。
**硬件与仿真统一**:物理机器人和 Gazebo 仿真使用相同的启动文件和配置,调参结果可直接迁移。
**详细的文档**:提供完整的安装、配置、传感器、导航等文档,并配有 Nav2 设置指南的逐步讲解。
技术规格
| 支持的 ROS2 发行版 | Jazzy |
|---|---|
| 支持的底盘类型 | 2WD、4WD、麦克纳姆轮 |
| 支持的激光雷达 | RPLIDAR A1/A2/A3/S1/S2/S3/C1, LD06, LD19, STL27L, YDLIDAR, XV11, Intel RealSense (作为激光雷达), ZED (作为激光雷达) |
| 支持的深度相机 | Intel RealSense D435/D435i, ZED/ZED2/ZED2i/ZED Mini, OAK-D/OAK-D Lite/OAK-D Pro |
| 微控制器支持 | Teensy 及兼容板,通过 micro-ROS 发布里程计和 IMU 数据 |
| 仿真环境 | Gazebo |
| 导航栈 | Nav2, SLAM Toolbox, robot_localization |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 2WD/4WD/麦克纳姆轮底盘套件 | 1 | — | 根据所选底盘类型 |
| 直流减速电机 | 2-4 | — | 根据底盘类型 |
| 电机驱动板(如 L298N、TB6612) | 1 | — | 根据电机数量和功率 |
| Teensy 或兼容板 | 1 | — | 运行 micro-ROS 固件 |
| 2D 激光雷达(如 RPLIDAR A1) | 1 | — | 用于 SLAM 和导航 |
| Intel RealSense D435 等 | 1 | — | 可选,用于视觉感知 |
| 锂电池组 | 1 | — | 为机器人供电 |
| 树莓派 4B 或 Jetson Nano | 1 | — | 运行 ROS2 和导航栈 |
| 杜邦线、螺丝、螺母等 | 若干 | — | 组装用 |
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
⚪ 数理与计算: 3/5
⚪ 动手与操作: 4/5
⚪ 狂热与坚持: 3/5
⚪ 创造与创新: 3/5
项目图库




所需技能
🔧 **动手能力**:需要组装机器人底盘、连接电机驱动、焊接电子元件、安装传感器等硬件操作。
💻 **编程能力**:需要熟悉 ROS2 基本概念和命令行操作,能够编辑 URDF 和配置文件,了解 Python/C++ 基础。
⚡ **电子电路**:需要理解电机驱动、传感器接口、电源管理等基本电路知识,能够使用万用表进行故障排查。
适用场景
**学习自主导航**:适合想学习 ROS2、Nav2 和 SLAM 的机器人爱好者或学生。
**快速原型开发**:为研究人员或工程师提供一个现成的机器人平台,用于验证导航算法或开发新应用。
**室内巡检与物流**:可用于开发室内巡检机器人、仓储物流机器人等应用。
**教学与实验**:作为机器人课程的教学平台,学生可以学习从硬件搭建到软件部署的全流程。