ADAPT 多任务载荷
adapt
ROS、无人机、智能家居
4/5
🧩 软硬件结合
已发布

项目简介
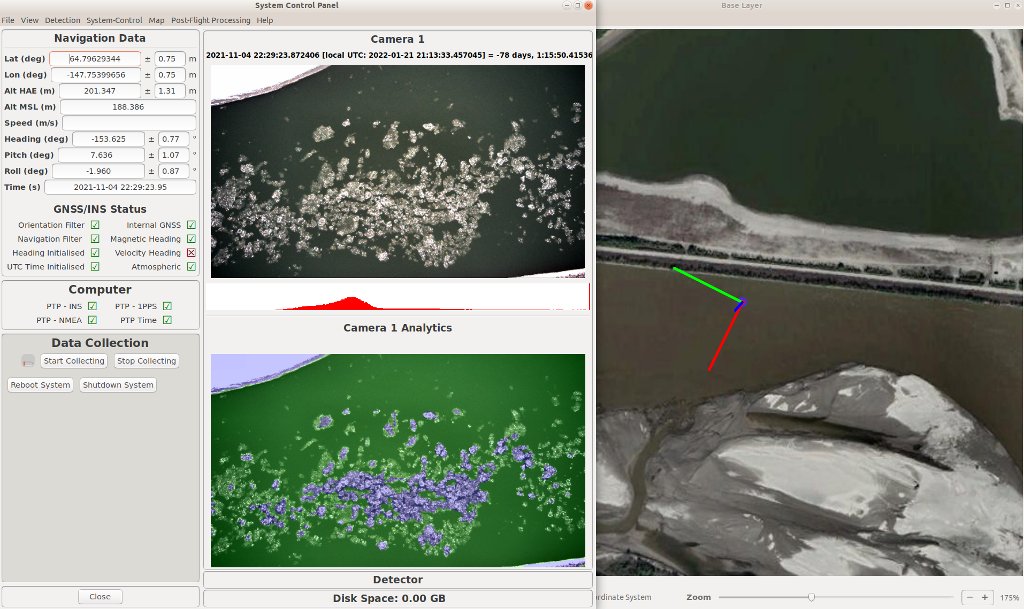
开源平台,用于在小型无人机上实时部署先进深度神经网络计算机视觉。
一个开源平台,用于在小型无人机系统上实时部署最先进的深度神经网络计算机视觉。
标签
项目特点
实时推理:针对小型无人机优化,能在低功耗硬件上跑深度神经网络,延迟极低。
深度神经网络集成:支持最新的计算机视觉模型,如目标检测、语义分割等。
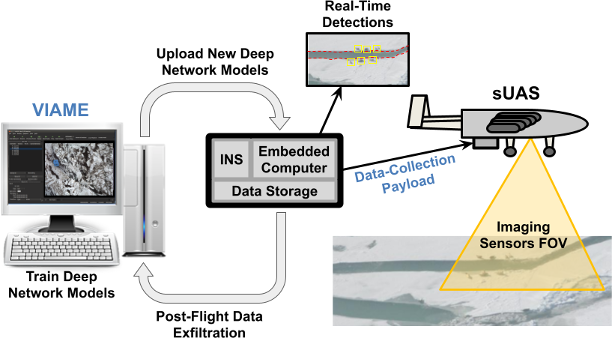
ROS 原生支持:基于机器人操作系统(ROS)构建,方便与现有无人机和机器人系统集成。
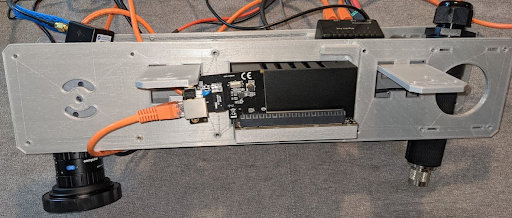
硬件设计开放:提供了配套的硬件设计文件,方便 DIY 或定制无人机载板。
MLOps 友好:包含模型部署、版本管理和监控工具,适合持续迭代。
开源与可扩展:Apache-2.0 许可证,社区可自由修改和贡献。
技术规格
| 支持框架 | |
|---|---|
| 推理引擎 | |
| 操作系统 | |
| 硬件平台 | |
| 相机接口 | |
| 网络模型 | |
| 通信协议 | |
| 实时性能 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| NVIDIA Jetson Xavier NX | 1 | — | 主推理板 |
| Raspberry Pi 4 Model B | 1 | — | 可选辅助板 |
| USB 摄像头 (1080p) | 1 | — | 或 CSI 相机 |
| microSD 卡 (64GB) | 1 | — | 系统与模型存储 |
| 5V/3A 电源适配器 | 1 | — | 或无人机电池供电 |
| USB 转 TTL 串口线 | 1 | — | 调试用 |
| 散热片 + 风扇 | 1 | — | Jetson 散热 |
| 3D 打印外壳 | 1 | — | 可选,STL 文件在仓库 |
能力画像
**记忆与知识检索**:2/5 — 项目本身不涉及知识库或检索,但文档和社区可提供模型部署参考。
**动手与操作**:4/5 — 需要焊接、组装无人机载板、连接相机和调试硬件。
**编程与算法**:4/5 — 需要 Python、ROS 编程,以及深度学习模型调优和部署。
**设计与建模**:3/5 — 提供硬件设计文件,可修改外壳或载板,但非核心。
**实验与调试**:4/5 — 需要调试实时推理性能、网络延迟和模型精度。
**协作与分享**:3/5 — 开源社区,可通过 GitHub Issue 和 PR 协作。
**学习与研究**:5/5 — 非常适合学习边缘 AI、无人机视觉和 MLOps。
**系统集成**:4/5 — 需要将视觉系统与无人机飞控、遥测和地面站集成。
项目图库
















所需技能
Python 编程
ROS (机器人操作系统) 基础
深度学习框架 (PyTorch / TensorFlow)
计算机视觉基础 (目标检测、跟踪)
Linux 命令行操作
硬件组装与调试 (Jetson / Raspberry Pi)
Docker 容器化
版本控制 (Git)
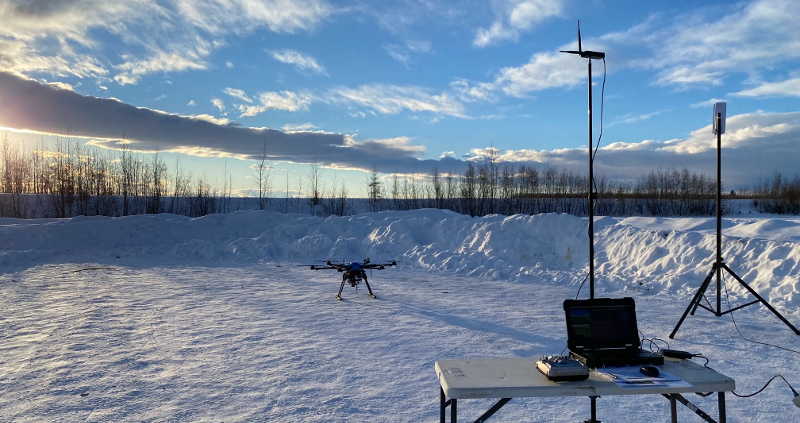
适用场景
无人机实时目标检测与跟踪 (如搜救、巡检)
地理空间数据分析 (农业、测绘)
边缘 AI 研究与教学实验
DIY 智能无人机项目
工业无人机视觉系统原型开发
MLOps 模型部署与监控演示