Fast-Drone-250 从零制作自主空中机器人
Fast-Drone-250
无人机、智能家居
1/5
🧩 软硬件结合
已发布

项目简介
250mm自主无人机硬件与软件设计。
Fast-Drone-250 是由浙江大学 FAST-LAB 实验室开源的一套面向自主空中机器人的完整教学与开发项目。该项目以“从零制作自主空中机器人”为核心目标,提供了一套从硬件组装、飞控配置、机载电脑环境搭建,到自主导航算法部署与实机实验的全流程解决方案。项目配套了详细的 B 站视频教程,所有代码与硬件设计均开源,旨在帮助无人机爱好者、学生及从业人员快速入门并掌握自主无人机的构建与调试。
项目特点
**从零到一的全流程指导**:涵盖硬件组装、软件配置、代码部署和实机实验,适合有一定基础但希望深入实践自主无人机技术的爱好者。
**完全开源**:所有代码、硬件设计文档和固件均开源,无商业限制(但严禁商用)。
**基于成熟算法**:采用 PX4 飞控固件、VINS-Fusion 视觉里程计和 Ego-Planner 轨迹规划算法,性能稳定可靠。
**配套视频教程**:B 站系列视频与文档同步,手把手教学,降低学习门槛。
**强调安全**:文档中反复强调安全操作规范,并提供多种紧急情况处理方案。
技术规格
| 轴距 | 250mm |
|---|---|
| 飞控 | Pixhawk 4 (或 V5+) |
| 固件 | PX4 v1.11.0 |
| 机载电脑 | Intel NUC (推荐拆壳安装) |
| 深度相机 | Intel Rehttps://raw.githubusercontent.com/ZJU-FAST-Lab/Fast-Drone-250/main/purchase_list.xlsx) AT9S |
| 电池 | 4S 2300mAh 航模电池 |
| 最大起飞重量 | 1.8kg |
| 续航时间 | 约5分钟 |
| 最大飞行范围 | 建议不超过50m x 50m |
| 操作系统 | Ubuntu 20.04 |
| ROS 版本 | ROS Noetic |
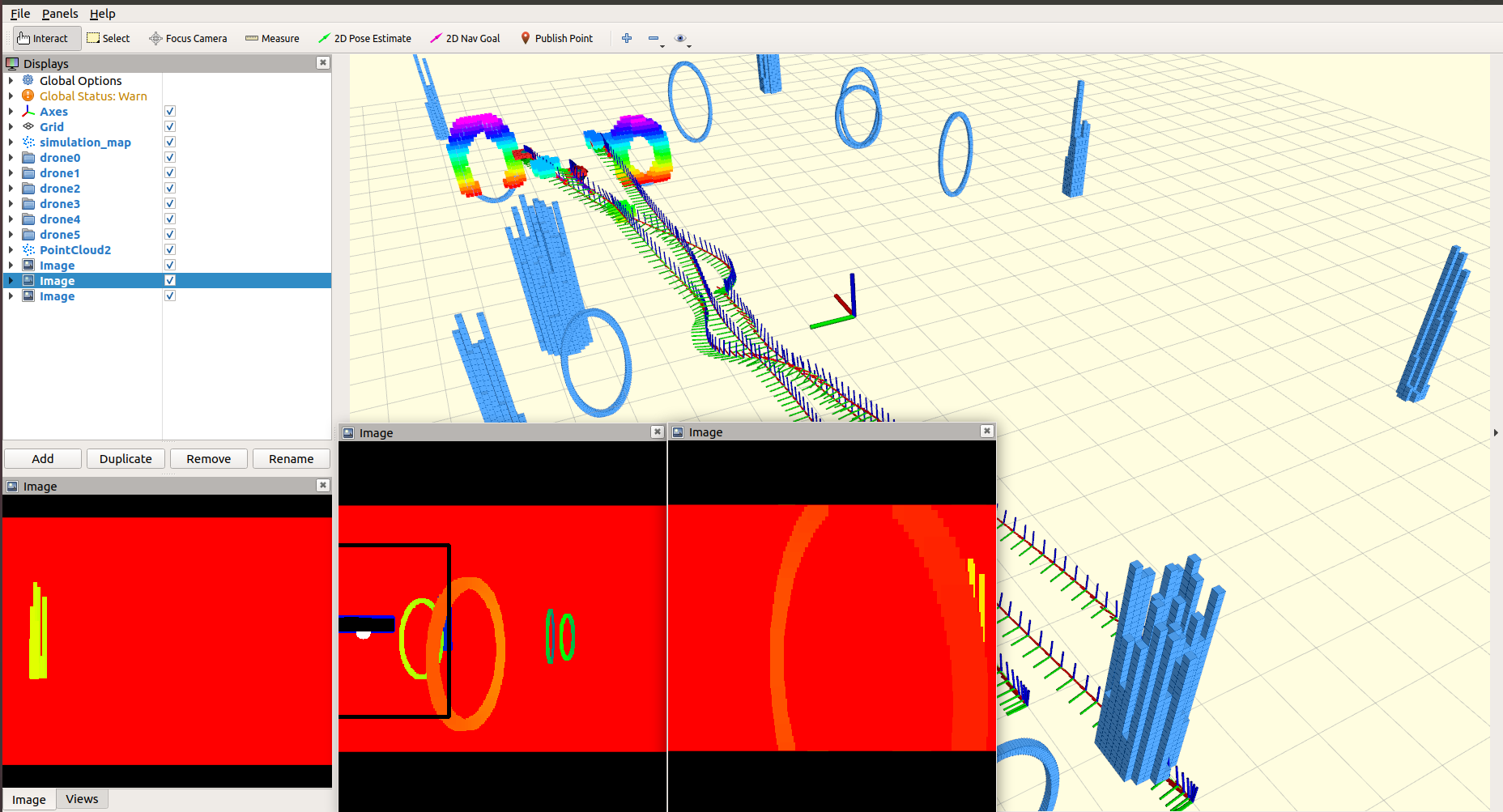
| 定位方案 | VINS-Fusion (双目 + IMU) |
| 规划算法 | Ego-Planner |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Q250 碳纤维机架 | 1 | — | 250mm轴距 |
| 电机 + 电调 + 桨叶 | 4套 | — | 详见购买清单 |
| Pixhawk 4 (或 V5+) | 1 | — | |
| Intel NUC | 1 | — | 推荐拆壳安装 |
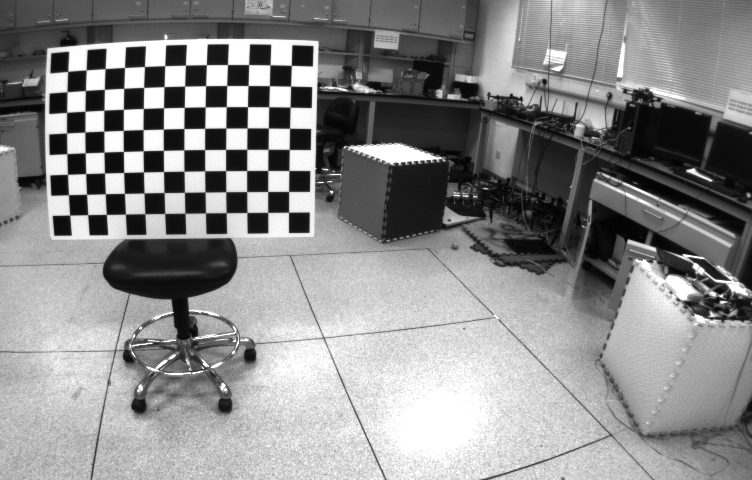
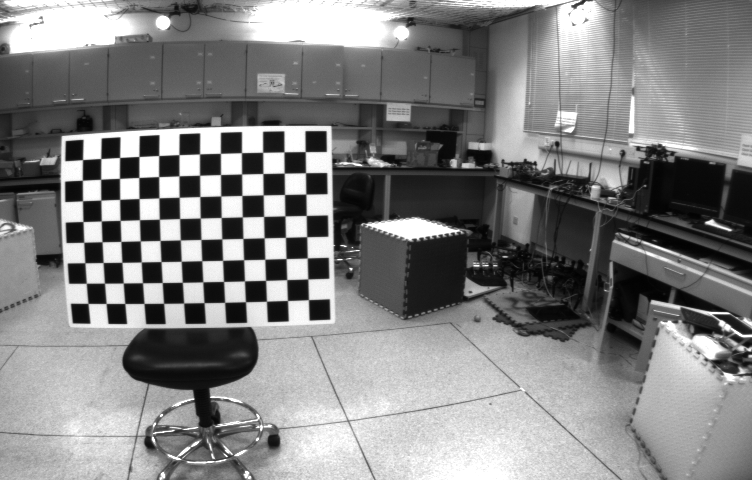
| Intel RealSense D435 | 1 | — | 需遮挡结构光 |
| 乐迪 AT9S | 1 | — | |
| 配套接收机 | 1 | — | |
| 4S 2300mAh 航模电池 | 1 | — | |
| 5V BEC | 1 | — | 为飞控供电 |
| 硅胶杜邦线、扎带、海绵胶、尼龙柱等 | 若干 | — | 详见购买清单 |
3D 模型
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 3/5
⚪ 数理与计算: 4/5
⚪ 动手与操作: 5/5
⚪ 狂热与坚持: 4/5
⚪ 创造与创新: 3/5
项目图库
















所需技能
🔧 **动手能力**:需要熟练的焊接、组装和硬件调试能力,能够处理精细的电子元件和机械结构。
💻 **编程能力**:需要掌握 Linux 命令行、ROS 框架、C++ 编程基础,能够配置环境、编译代码和调试参数。
⚡ **电子电路**:需要了解基本的电路知识,能够使用万用表检测电路,理解电源、电调、飞控等电子设备的连接。
适用场景
**教育科研**:作为高校机器人课程或实验室的实践项目,帮助学生理解自主无人机的完整系统。
**个人爱好**:适合有一定穿越机飞行经验和编程基础的爱好者,打造自己的自主飞行平台。
**算法验证**:为研究人员提供一个开源的硬件和软件平台,用于验证新的规划、控制或定位算法。