多旋翼地面效应感知建模与控制
Ground-effect-controller
智能硬件
1/5
🧩 软硬件结合
已发布
项目简介
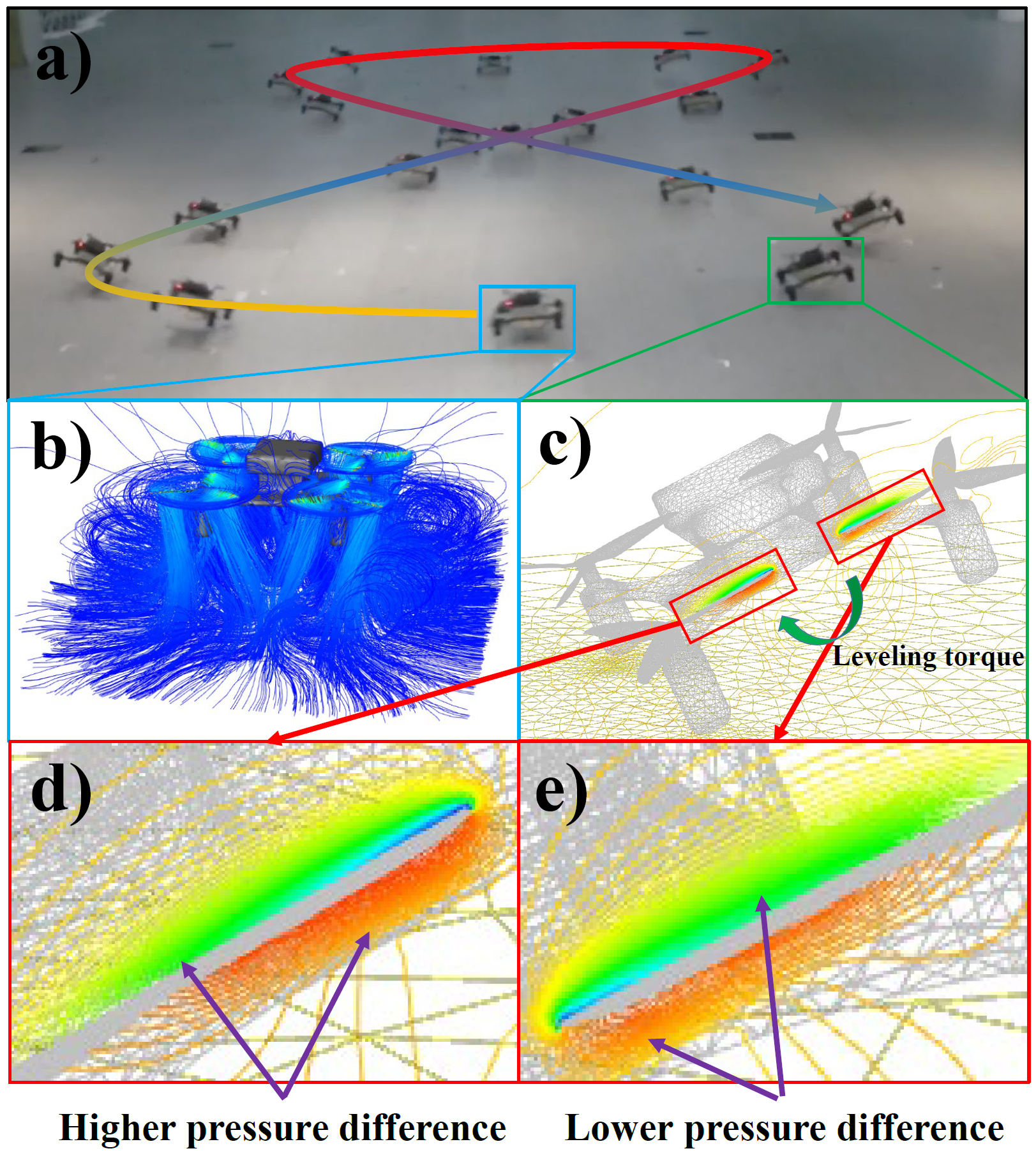
地面效应感知的多旋翼建模与控制。
这是一个面向多旋翼无人机的地面效应建模与控制开源项目,源自一篇学术论文的配套材料。核心解决的是无人机在靠近地面飞行时,因地面效应导致气动特性突变、控制精度下降甚至失稳的工程难题。传统控制器在近地场景下往往依赖经验调参或忽略该效应,而本项目通过建立显式的地面效应模型,实现了更精准的飞行控制。
项目特点
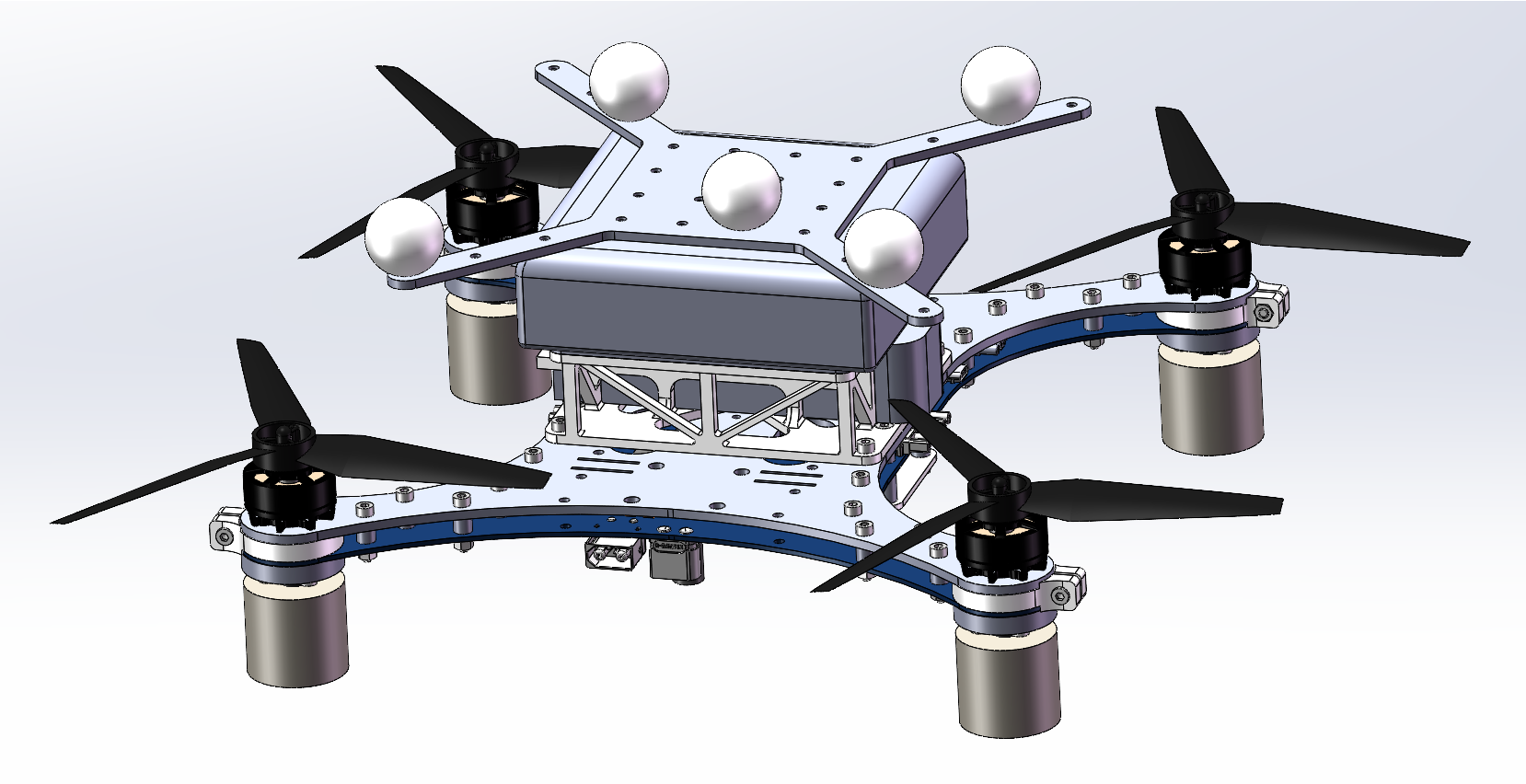
**完整的地面效应研究平台**:提供了四旋翼飞行器和专用力测量平台的CAD模型、BOM清单和固件,便于复现。
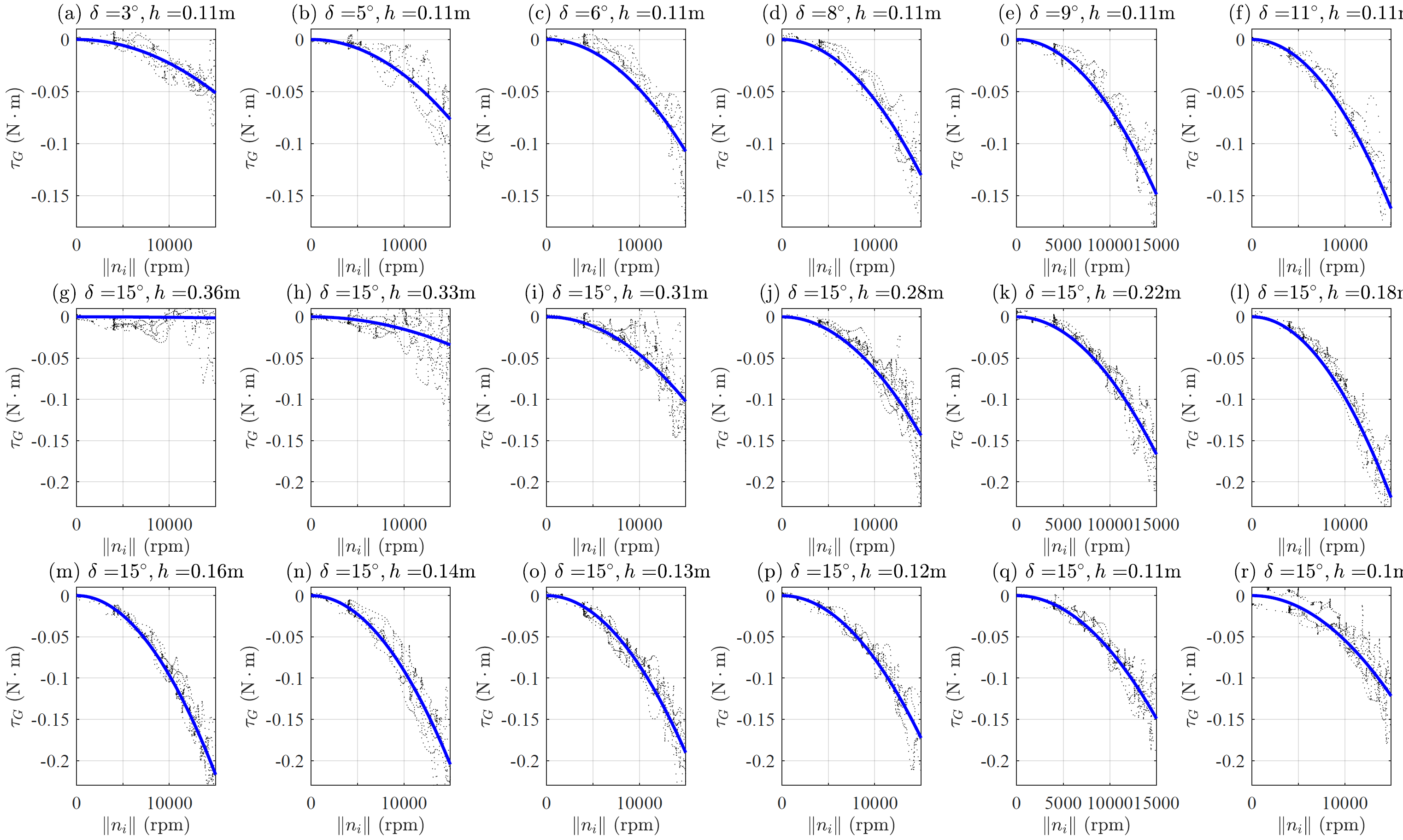
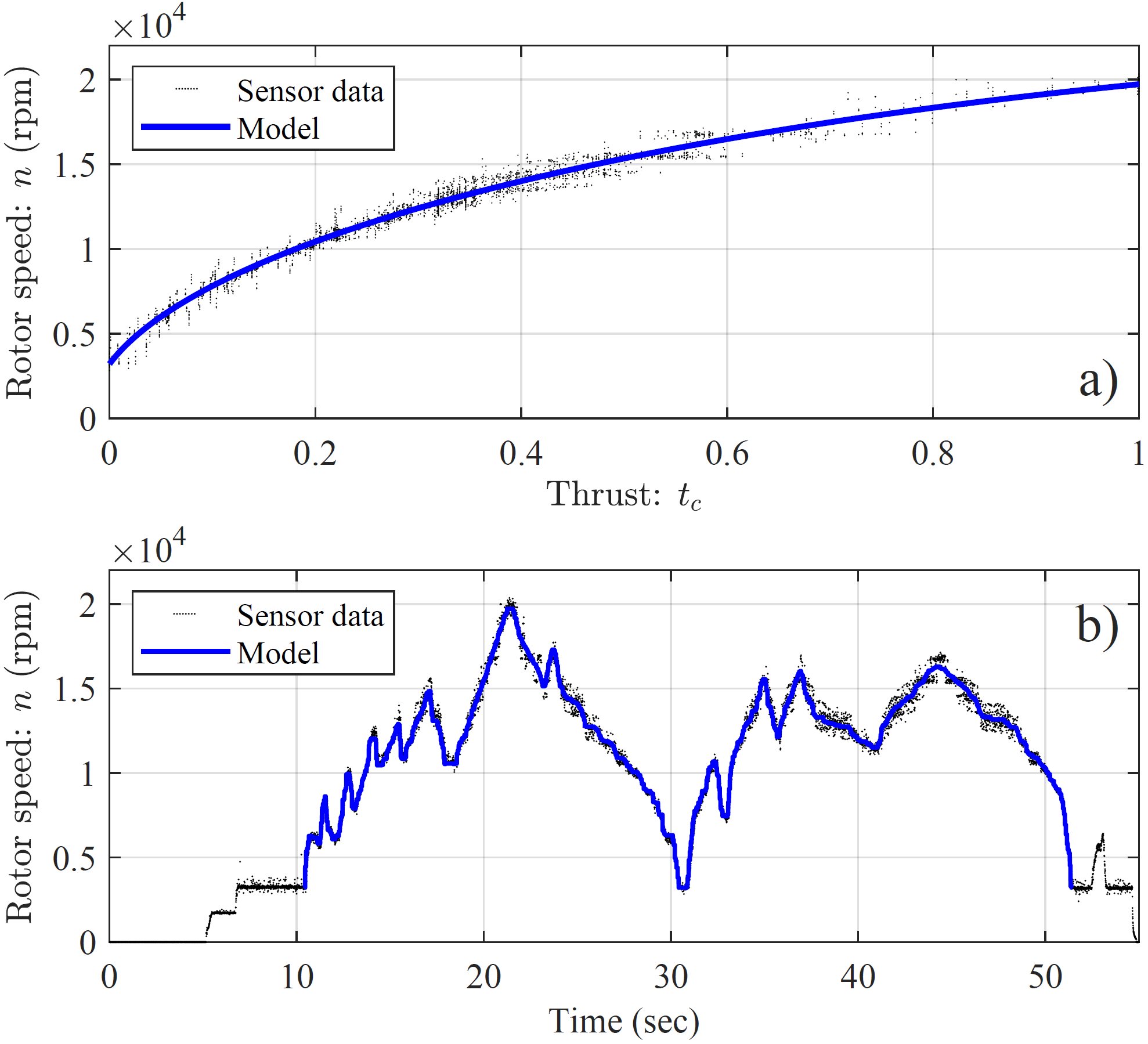
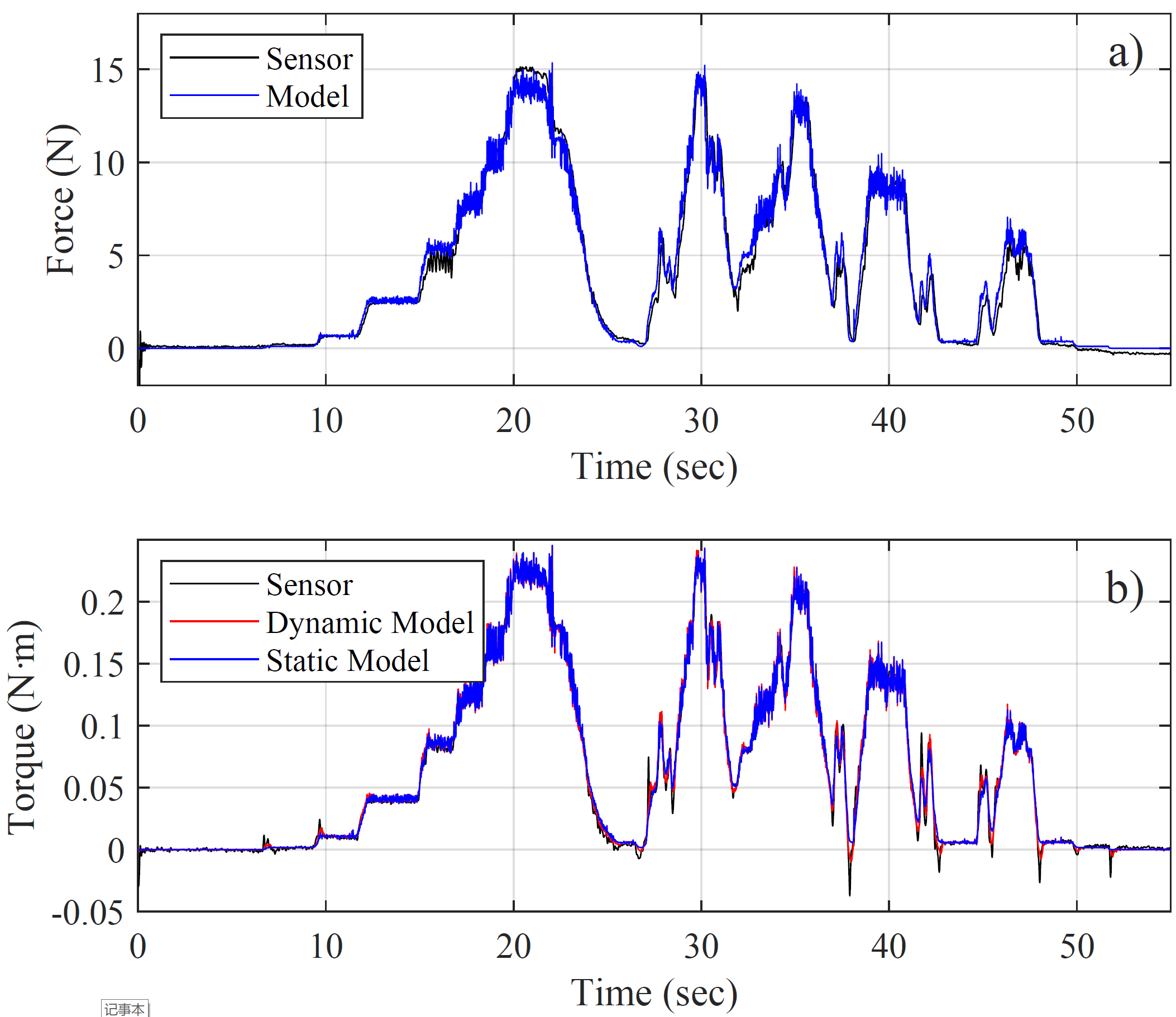
**详细的建模与参数辨识**:包含电机模型、推力/扭矩系数、地面效应系数等关键参数的辨识方法和结果。
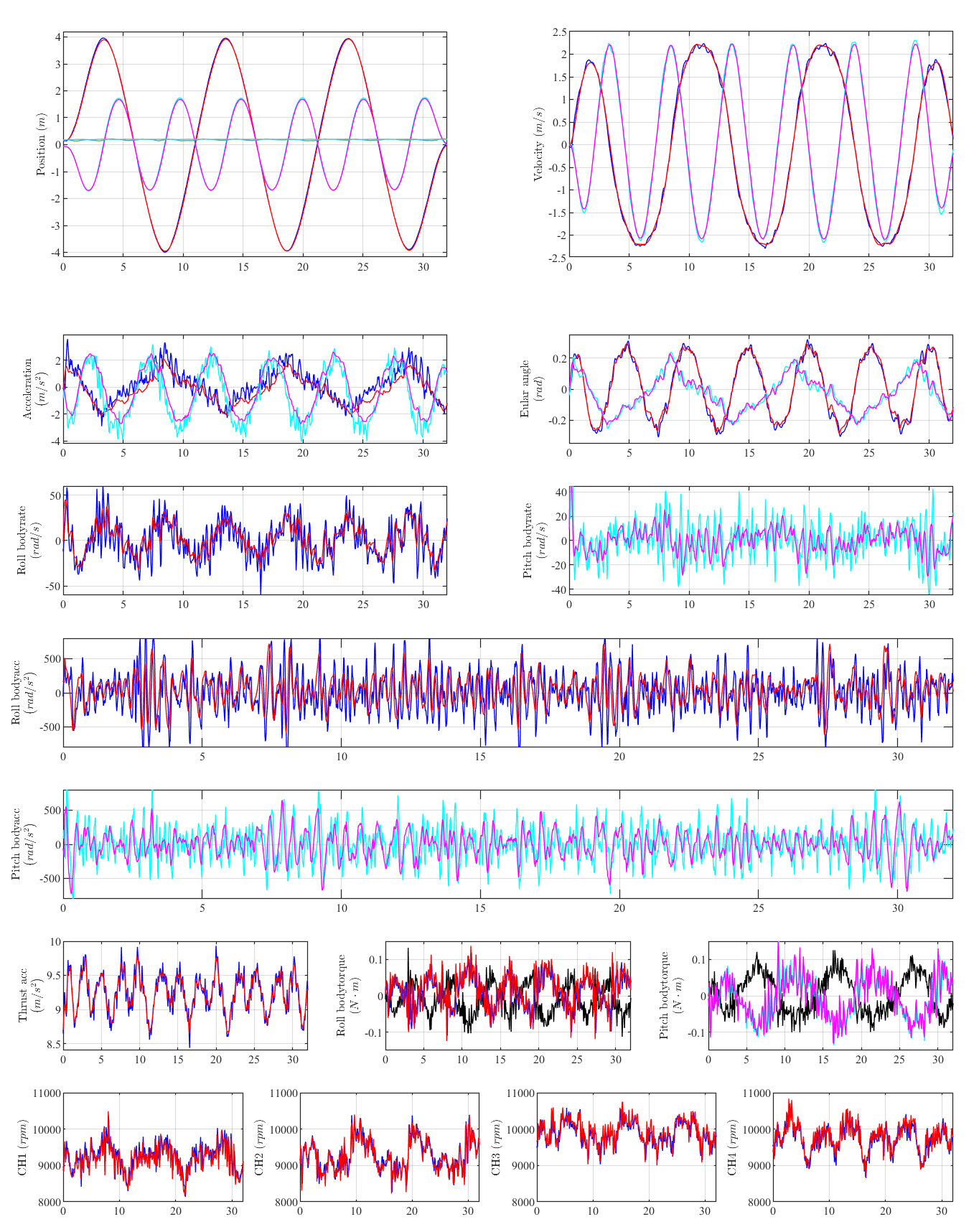
**闭环旋翼速度控制**:提出了一种基于加速度误差的PI控制器,用于精确控制所有旋翼的合推力。
**丰富的实验数据**:提供了调平力矩数据、电机标定数据等,并计划上传ROS bag数据。
**学术研究导向**:项目结构清晰,理论推导与实验验证相结合,适合作为研究生或高级工程师的研究参考。
技术规格
| 飞行控制器 | CUAV V5+ |
|---|---|
| 机载计算机 | Intel NUC 11 Pro Kit (NUC11TNKI5) |
| 激光传感器 | https://raw.githubusercontent.com/ZJU-FAST-Lab/Ground-effect-controller/main/figs/traj_rmse_plot.pdf)V Mars |
| 电机 | 4个,7英https://raw.githubusercontent.com/ZJU-FAST-Lab/Ground-effect-controller/main/figs/getorque_all_rpmmodel.pdf).70克 |
| 旋翼控制方式 | 基于https://raw.githubusercontent.com/ZJU-FAST-Lab/Ground-effect-controller/main/figs/sigle_motor_platform.pdf)(https://github.com/ZJUhttps://raw.githubusercontent.com/ZJU-FAST-Lab/Ground-effect-controller/main/figs/id_single_motor.pdf)-- 项目主仓库,包含所有代码、CAD和文档 |
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 上中心板 | 1 | — | 112.80g |
| 下中心板 | 1 | — | 150.00g |
| 飞控底座PCB | 1 | — | 14.00g |
| 飞控核心PCB | 1 | — | 10.50g |
| 飞行控制器 | 1 | — | 41.30g (CUAV V5+) |
| M3防松螺母 | 20 | — | 0.40g/个 |
| M3隔离柱 (6mm) | 20 | — | 0.18g/个 |
| M3螺丝 (16mm) | 20 | — | 1.04g/个 |
| 碳管夹 | 4 | — | 4.90g/个 |
| 碳管隔套 | 4 | — | 4.23g/个 |
| 碳管 | 4 | — | 2.50g/个 |
| 碳管海绵柱 | 4 | — | 3.25g/个 |
| 碳管海绵圆垫 | 4 | — | 0.40g/个 |
| 电机 | 4 | — | 45.00g/个 |
| 桨叶 (7英寸) | 4 | — | 7.50g/个 |
| M3螺丝 (20mm) | 16 | — | 1.23g/个 |
| 3D打印固定件 | 1 | — | 56.50g |
| Intel NUC | 1 | — | 494.20g |
| SSD | 1 | — | 8.80g |
| RAM | 2 | — | 8.20g/个 |
| 电池 22.2V 1400mAh | 1 | — | 233.80g |
| 反射球支架 | 1 | — | 31.50g |
| 反射球 (25mm) | 5 | — | 6.52g/个 |
| M3螺丝 (10mm) | 8 | — | 0.77g/个 |
| M3防松螺母 | 8 | — | 0.40g/个 |
| M3螺丝 (16mm) | 4 | — | 1.04g/个 |
| M3隔离柱 (6mm) | 4 | — | 0.18g/个 |
| M3单通铝柱 (12mm) | 4 | — | 0.60g/个 |
| M3防松螺母 | 4 | — | 0.40g/个 |
| 激光传感器固定碳板 | 1 | — | 10.60g |
| 激光传感器 | 1 | — | 8.30g (Nooploop TOFSense-M) |
3D 模型
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 5/5
⚪ 表达与交流: 2/5
⚪ 感知与观察: 3/5
⚪ 数理与计算: 5/5
⚪ 动手与操作: 4/5
⚪ 狂热与坚持: 4/5
⚪ 创造与创新: 4/5
项目图库








所需技能
🔧 **动手能力**:需要能够组装和调试四旋翼飞行器,包括安装机架、电机、飞控、机载计算机等硬件,并搭建力测量平台。
💻 **编程能力**:需要熟悉C/C++(用于飞控固件开发)、Python(可能用于数据处理和脚本编写),以及Linux环境(用于机载计算机和虚拟机)。
⚡ **电子电路**:需要了解基本的电子电路知识,能够连接飞控、电调、传感器和机载计算机,并处理电源管理。
适用场景
**学术研究**:用于研究多旋翼无人机的地面效应动力学,验证新的建模和控制算法。
**高级机器人课程**:作为研究生或高年级本科生机器人学、控制理论课程的实践项目。
**无人机系统开发**:为工业级无人机在近地飞行(如起降、巡检)时的控制优化提供参考。
**开源硬件爱好者**:对于有深厚技术背景的爱好者,可以复现该平台并探索地面效应补偿。