PX4 自动驾驶仪
PX4-Autopilot
无人机
1/5
🧩 软硬件结合
已发布
项目简介
PX4 Autopilot软件:自动驾驶仪软件。
PX4-Autopilot 是一个开源的专业级自动驾驶仪栈,专为无人机和无人驾驶车辆设计,被业界广泛采用。它解决了从消费级竞速无人机到工业级测绘飞行器等各类无人平台的自主飞行控制问题,核心价值在于提供了一个模块化、硬件兼容性极强且不受单一厂商控制的飞行控制解决方案。
标签
项目特点
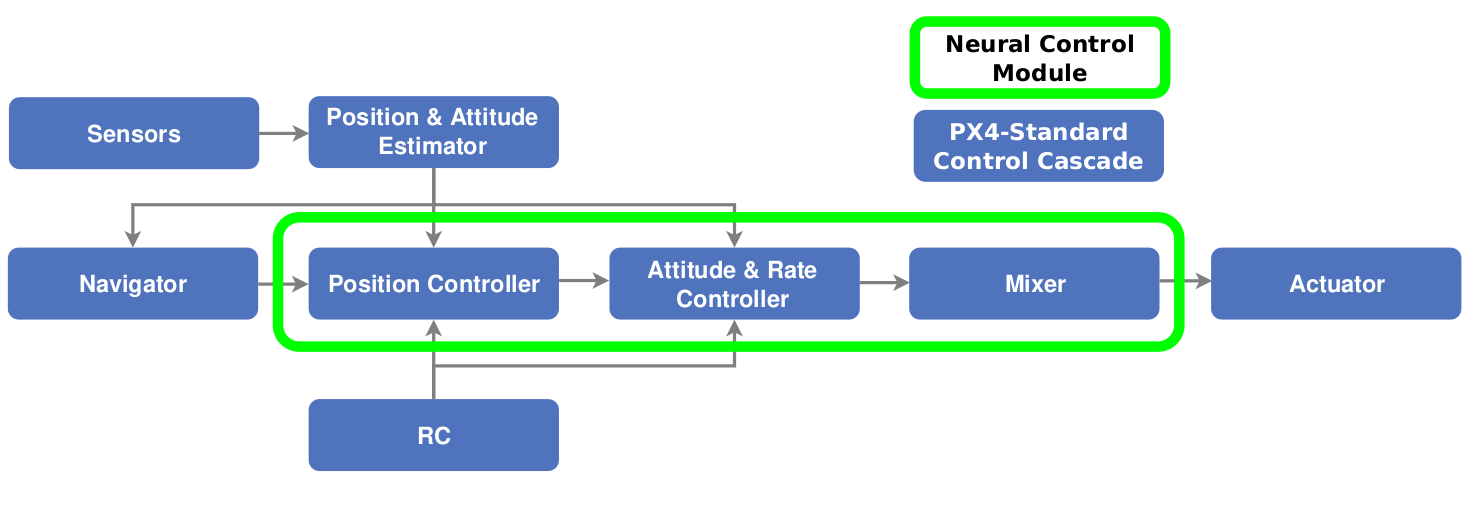
**模块化架构**:基于 uORB 和 DDS 兼容的发布/订阅中间件,模块完全并行化且线程安全,可自定义配置。
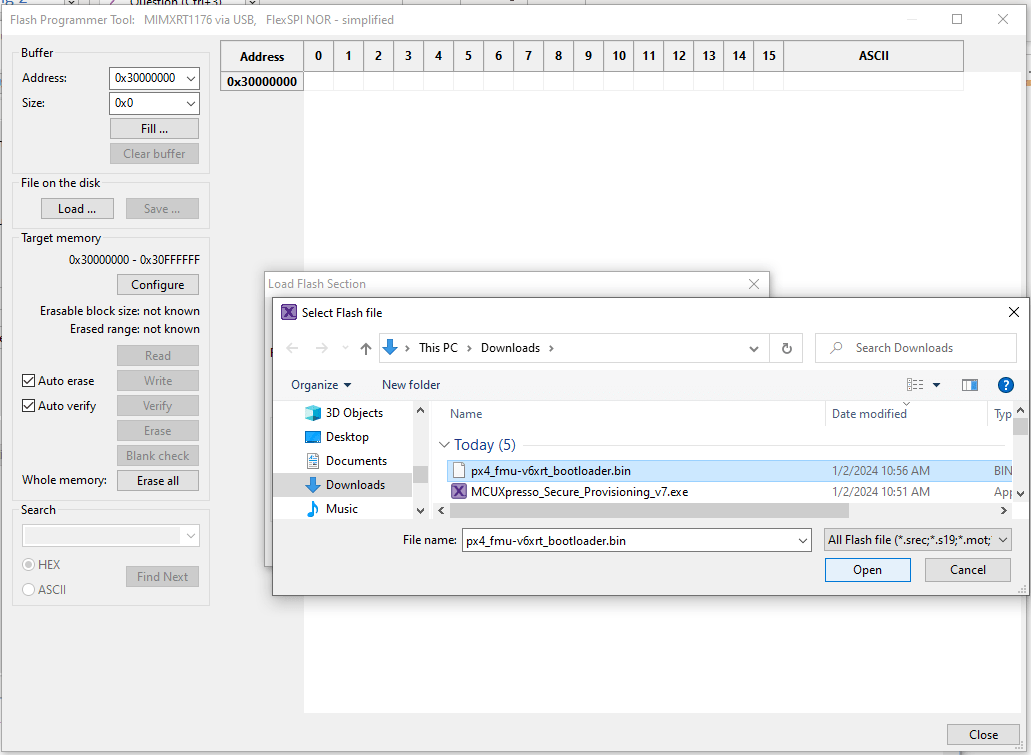
**广泛的硬件支持**:支持多种自动驾驶板、传感器、遥测无线电和执行器,通过 Pixhawk 生态系统实现。
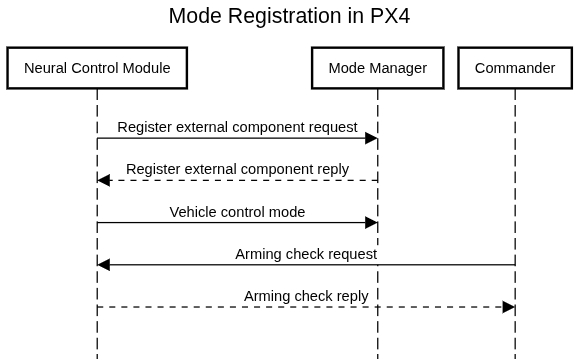
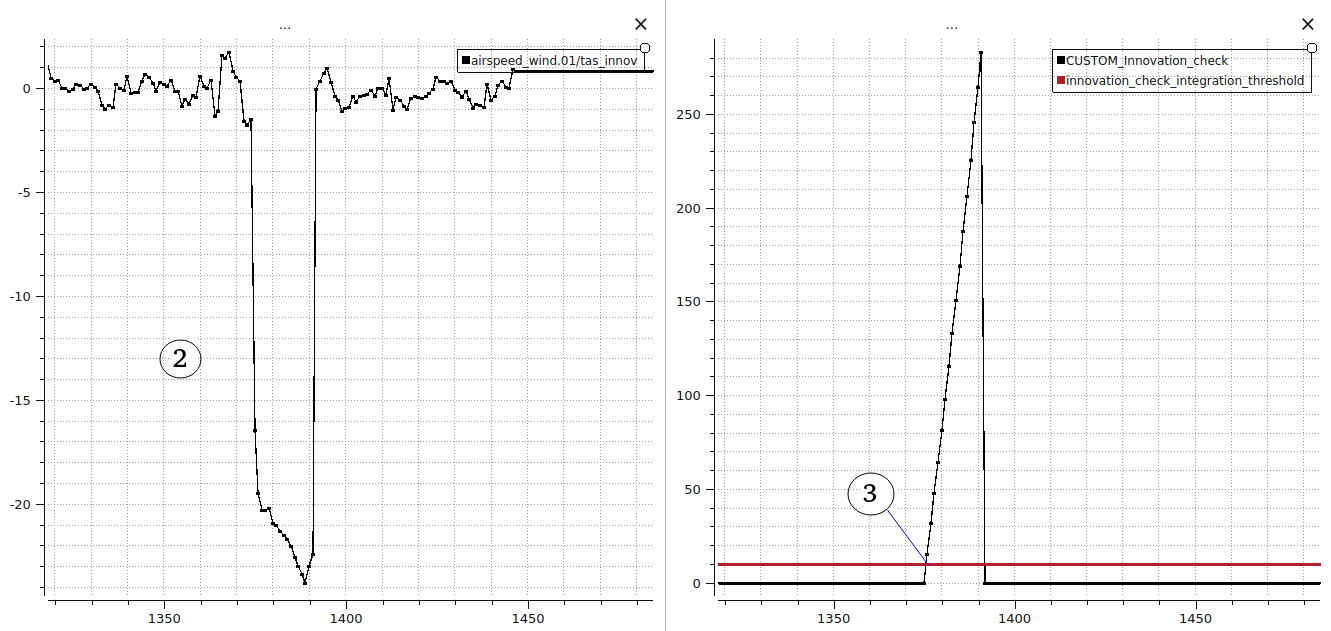
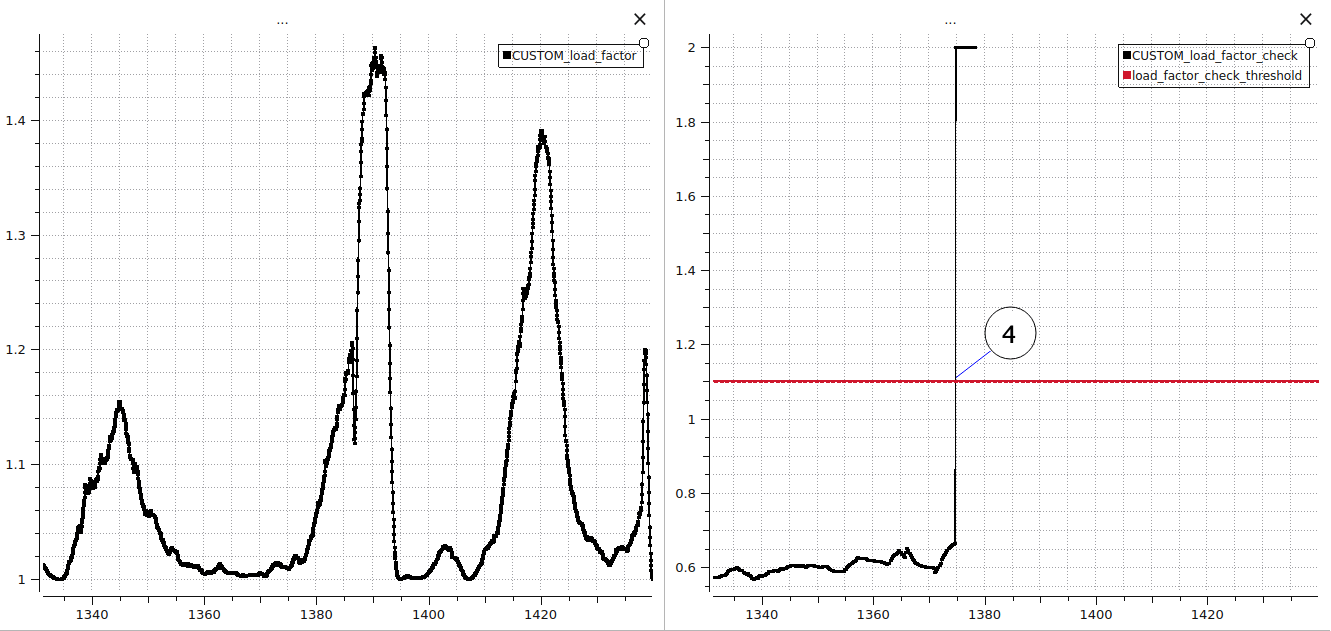
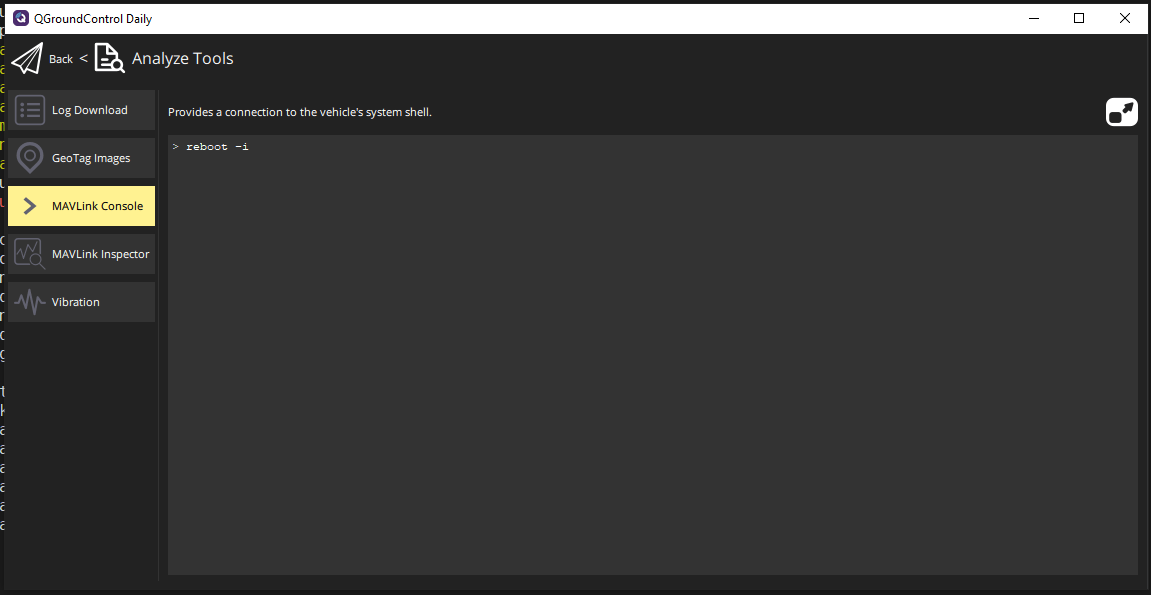
**开发者友好**:原生支持 MAVLink 和 DDS/ROS 2 集成,提供全面的 SITL 仿真、硬件在环测试和日志分析工具。
**厂商中立治理**:由 Dronecode 基金会托管,BSD 3-Clause 许可证,无单一厂商控制路线图。
**丰富的机型支持**:支持多旋翼、固定翼、VTOL、地面车辆、直升机、飞艇、潜艇等多种平台。
技术规格
| 支持平台 | NuttX, Linux, macOS |
|---|---|
| 支持机型 | 多旋翼、固定翼、VTOL、地面车辆、直升机、飞艇、潜艇等 |
| 通信协议 | MAVLink, DDS/ROS 2 |
| 中间件 | uORB (DDS 兼容) |
| 许可证 | BSD 3-Clause |
| 硬件生态 | Pixhawk 系列自动驾驶板 |
| 仿真支持 | SITL (软件在环), HITL (硬件在环) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Pixhawk 系列(如 Pixhawk 4) | 1 | — | 核心控制器 |
| GPS/GLONASS 模块 | 1 | — | 定位 |
| 空速计 | 1 | — | 固定翼/VTOL 必需 |
| 激光雷达/超声波 | 1 | — | 避障(可选) |
| 电机/电调 | 4+ | — | 根据机型配置 |
| 舵机 | 2+ | — | 固定翼/VTOL 控制面 |
| 遥测无线电(如 3DR Radio) | 1对 | — | 地面站通信 |
| 电源模块 | 1 | — | 电压电流监测 |
| LiPo 电池 | 1 | — | 根据机型选择容量 |
| 多旋翼/固定翼/VTOL 机架 | 1 | — | 根据机型选择 |
能力画像
⚪ 记忆与知识检索: 3/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 2/5
⚪ 感知与观察: 3/5
⚪ 数理与计算: 4/5
⚪ 动手与操作: 4/5
⚪ 狂热与坚持: 5/5
⚪ 创造与创新: 4/5
项目图库



所需技能
🔧 **动手能力**:需要组装和调试无人机硬件,包括焊接、布线、机架组装和传感器校准。
💻 **编程能力**:需要 C/C++ 编程能力以修改飞控栈,熟悉 Linux 命令行和 Git 版本控制。
⚡ **电子电路**:需要理解基本电子电路知识,包括电源管理、传感器接口和电机控制。
适用场景
无人机研究和开发:用于学术研究、算法验证和新机型开发。
工业勘测和测绘:搭载专业传感器进行地形测绘、农业监测等。
竞速和航拍:支持高性能竞速无人机和专业航拍应用。
教育和培训:作为无人机系统教学平台,学习飞控原理和嵌入式系统。