Petoi控制器Qt版
PetoiControllerQt
智能硬件
1/5
🧩 软硬件结合
已发布
项目简介
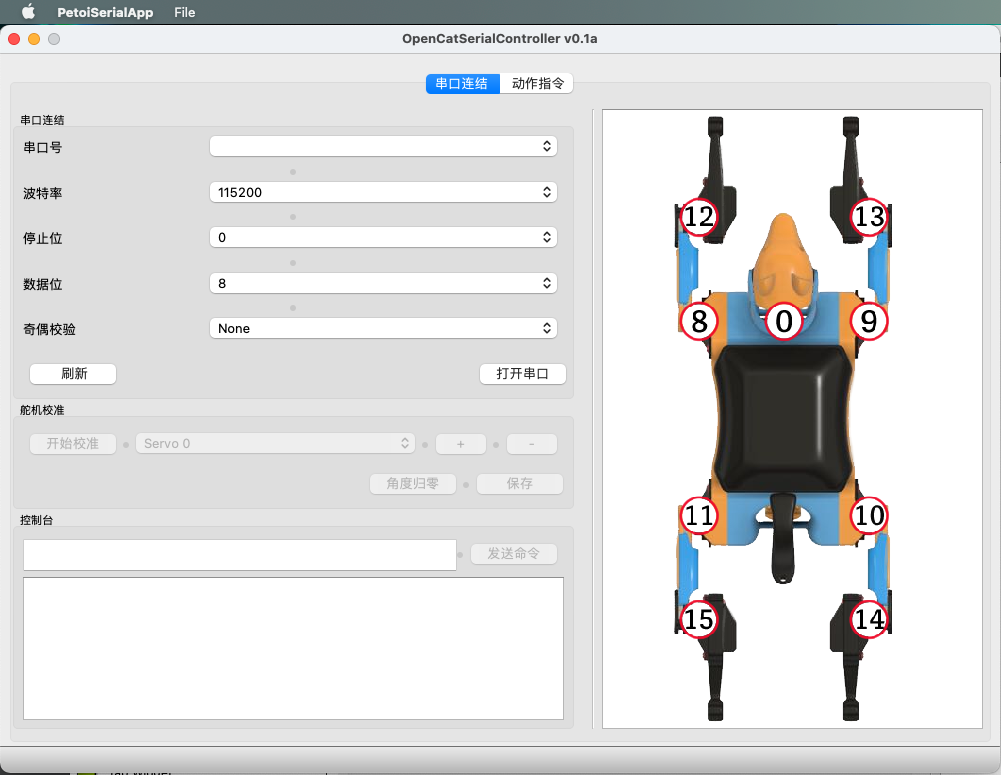
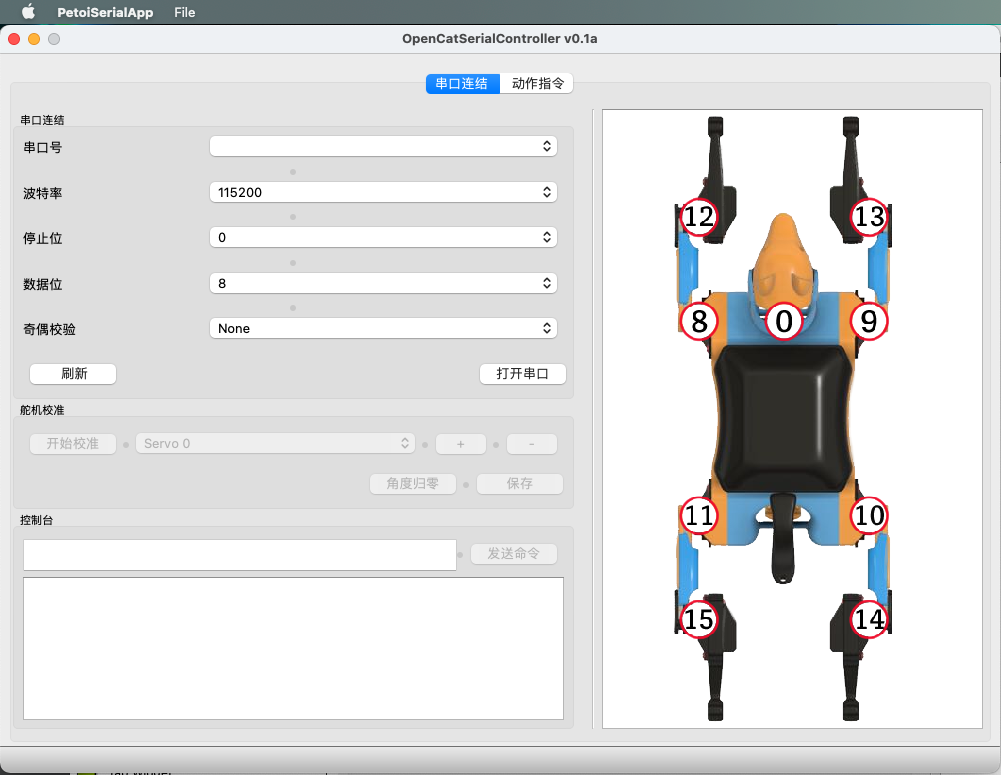
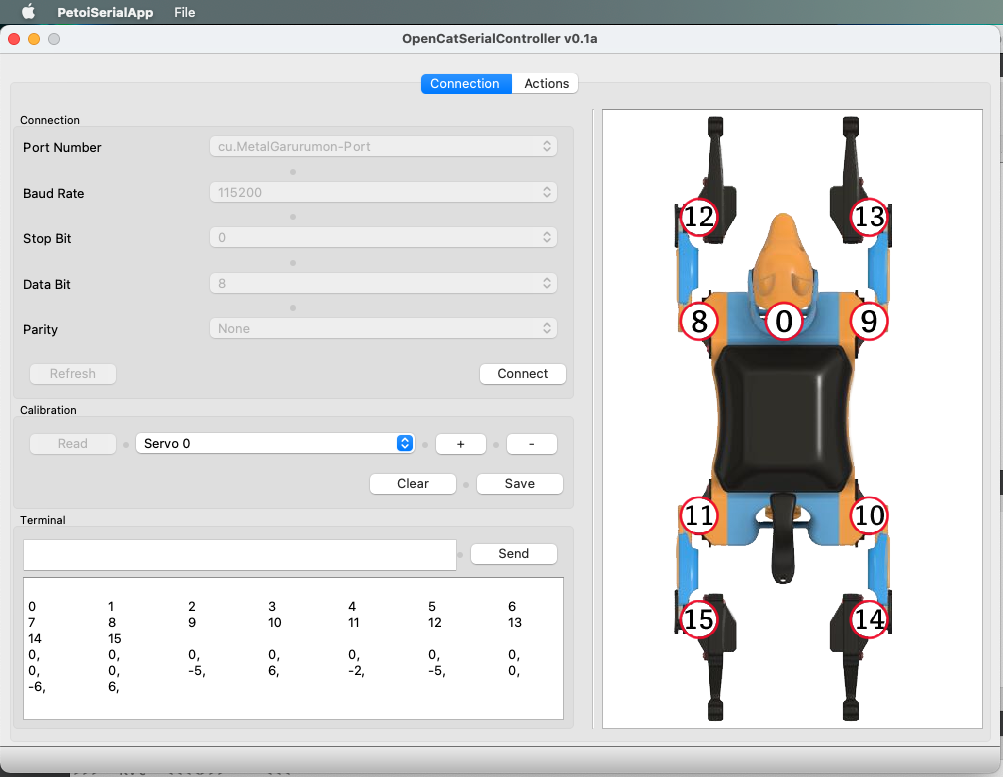
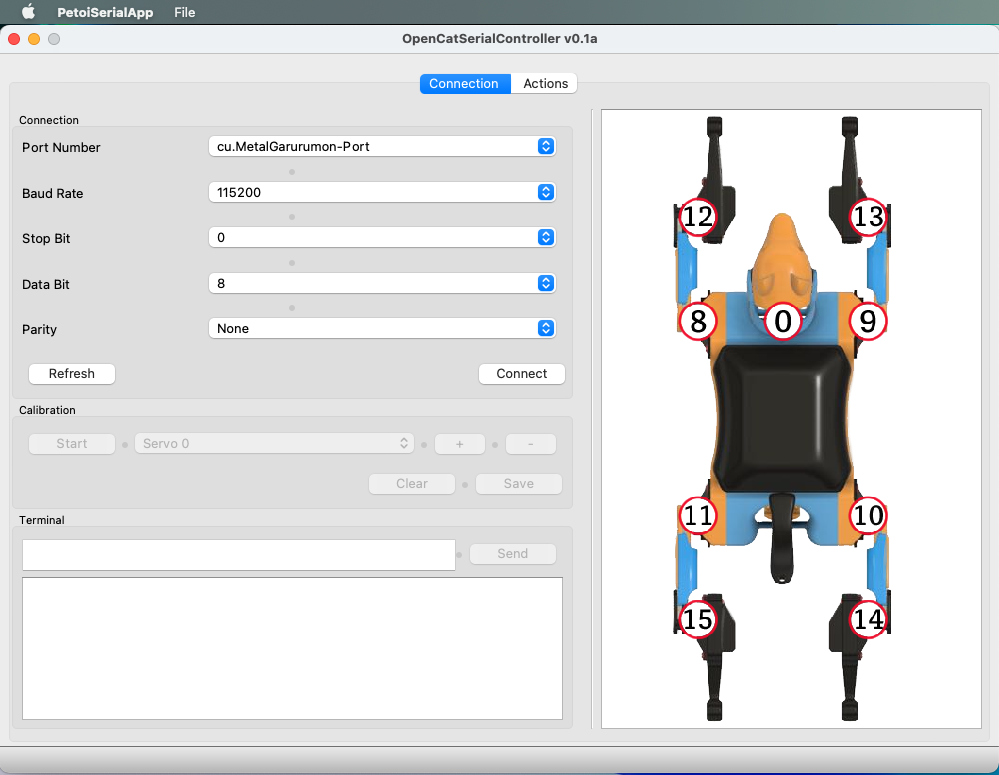
通过Qt 5串口连接并通信Bittle。
PetoiControllerQt 是一个专为 Petoi 旗下仿生机器人(如 Bittle)设计的跨平台串口控制工具。项目基于 Qt5 框架开发,支持在 Windows、macOS 和 Linux 三大操作系统上编译运行,无需安装任何第三方依赖库,仅需 Qt5 环境即可完成构建。
项目特点
基于 Qt 5 开发,支持 Windows、macOS、Linux 跨平台运行
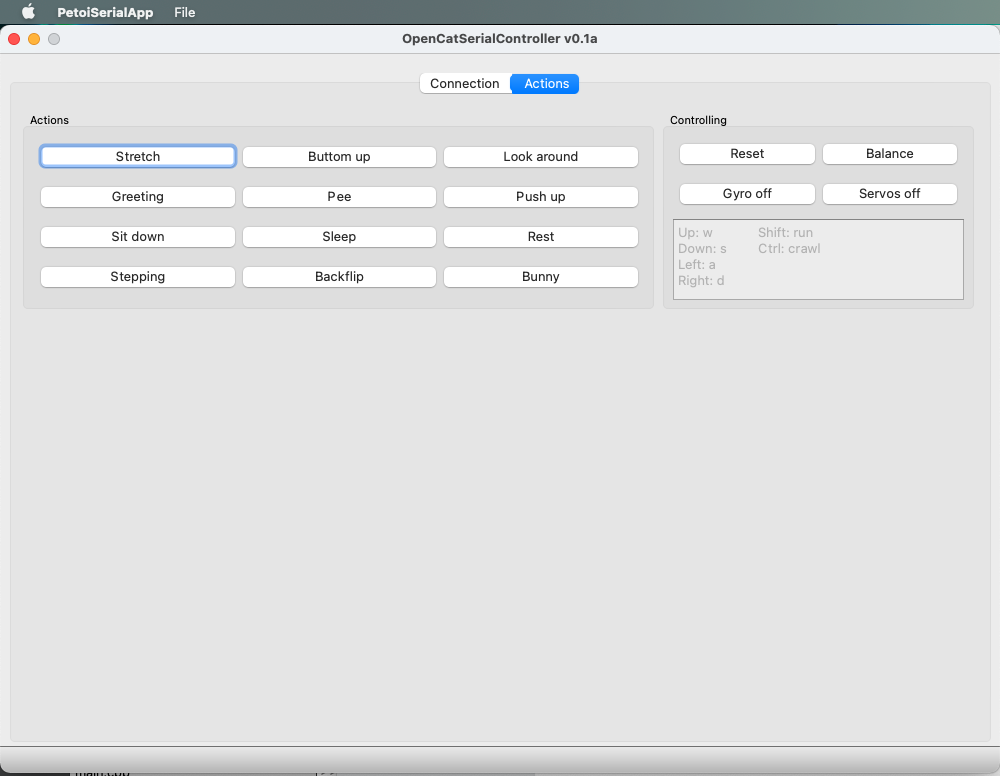
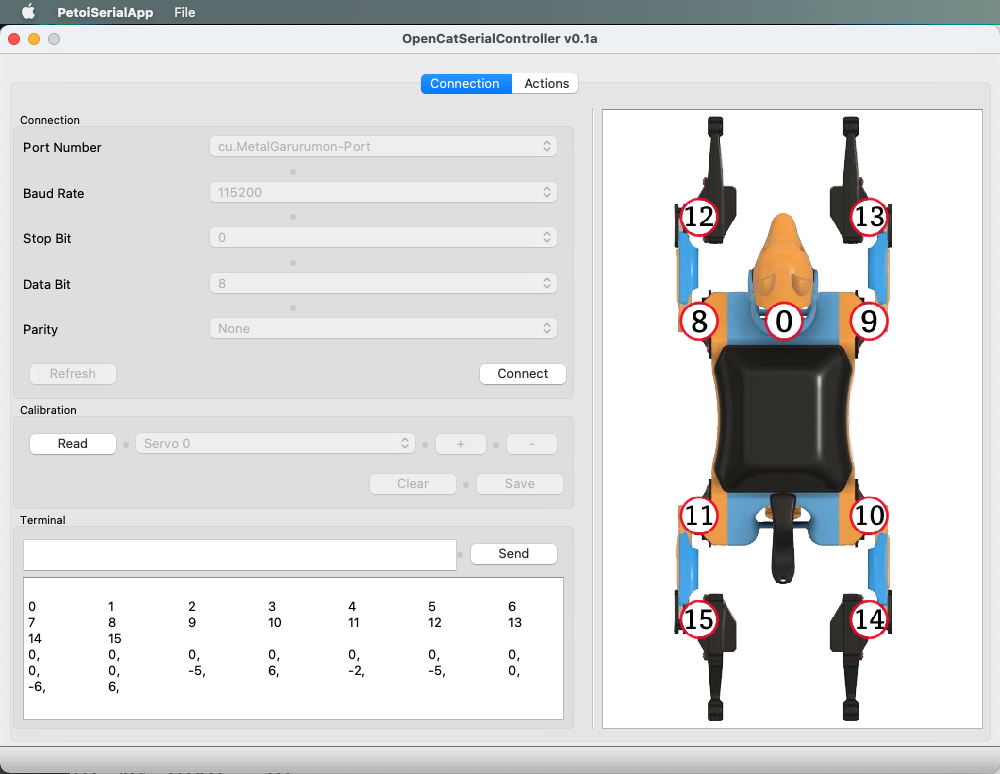
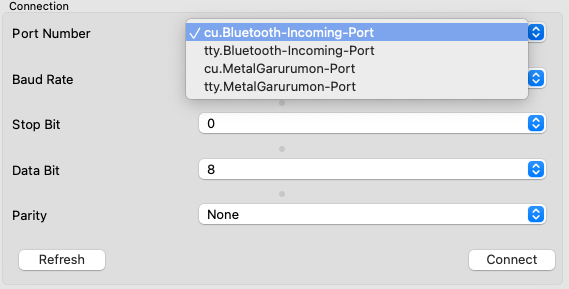
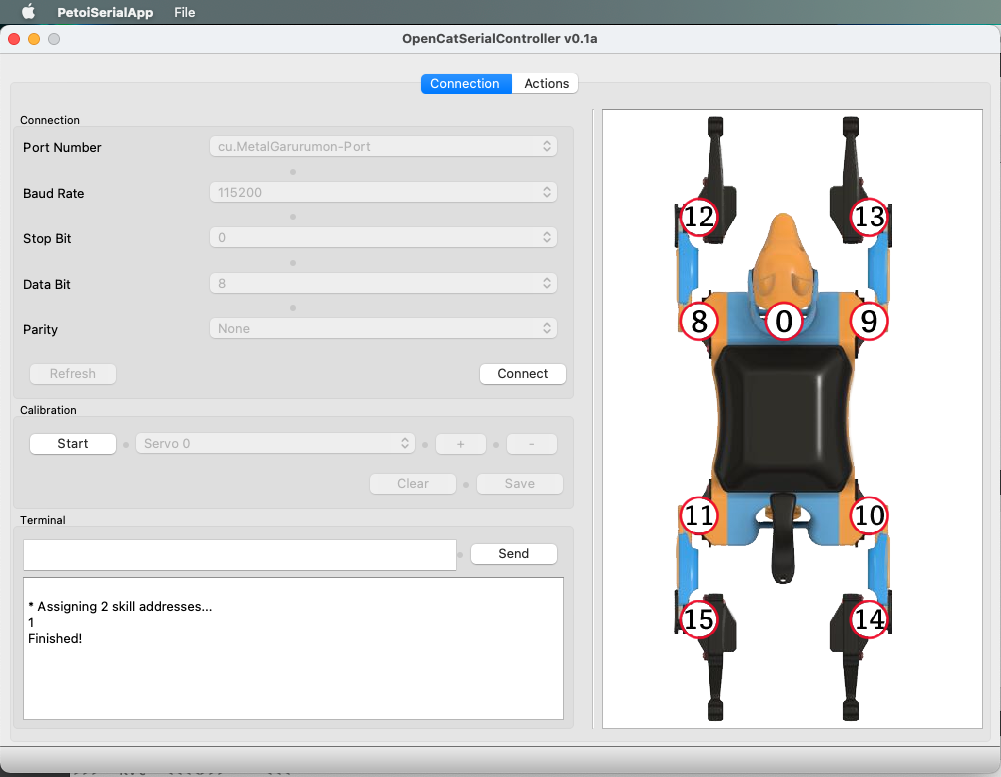
通过串口与 Bittle 机器人实时通信,发送动作指令和接收反馈
提供图形化界面,方便调试和监控机器人状态
支持自定义指令序列,可编写脚本控制机器人行为
开源免费,遵循 GPL-3.0 许可证,可自由修改和分发
代码结构清晰,适合学习串口通信和 Qt 编程的实践项目
技术规格
| Qt 5 | |
| C++ | |
| 串口(Serial Port) | |
| Petoi Bittle 四足机器人 | |
| Windows / macOS / Linux | |
| GPL-3.0 | |
| https://github.com/PetoiCamp/PetoiControllerQt | |
| 27 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Bittle 四足机器人 | 1 | — | 目标控制设备 |
| USB 数据线 | 1 | — | 用于串口通信连接 |
| Qt 5 开发环境 | 1 | — | 编译和运行本项目 |
| 串口驱动 | 1 | — | 根据操作系统安装对应驱动 |
能力画像
**记忆与知识检索**:3/5 — 需要查阅 Qt 文档和串口通信协议,但项目本身不涉及大量记忆
**动手与操作**:4/5 — 需要连接硬件、配置串口、调试机器人动作,动手环节较多
**编程与算法**:4/5 — 涉及 C++ 编程、Qt 信号槽机制、串口数据解析,有一定编程要求
**设计与建模**:2/5 — 界面设计基于 Qt Designer,无需复杂建模
**实验与调试**:4/5 — 需要反复测试串口通信、机器人响应和指令序列,调试工作量较大
**协作与分享**:3/5 — 开源项目,可提交 Issue 和 Pull Request,但社区规模较小
**学习与研究**:4/5 — 适合学习 Qt 开发、串口通信、机器人控制等知识
**系统集成**:3/5 — 需要将软件与硬件、操作系统、驱动等集成,但整体复杂度中等
项目图库


所需技能
C++ 编程基础
Qt 5 框架使用经验
串口通信原理
基本硬件调试能力(连接串口、识别端口)
使用 Git 进行版本管理
阅读英文技术文档
适用场景
学习 Qt 5 桌面应用开发的入门项目
对 Petoi Bittle 机器人进行二次开发和控制
机器人教育和创客课堂中的实践案例
串口通信编程的参考示例
开源硬件爱好者的 DIY 项目