机器人3D打印
Robotic_Printing
3D打印
3/5
🧩 软硬件结合
已发布

项目简介
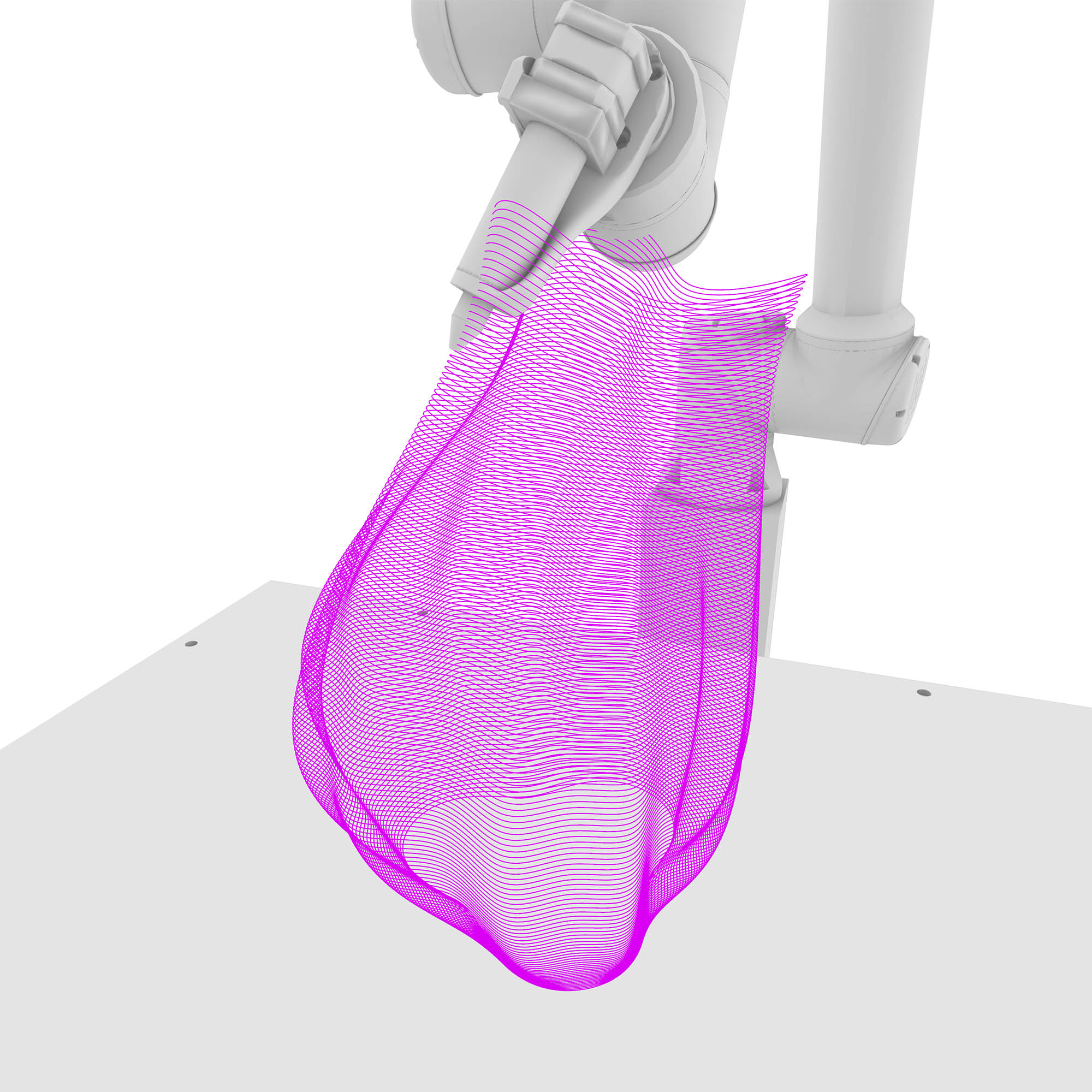
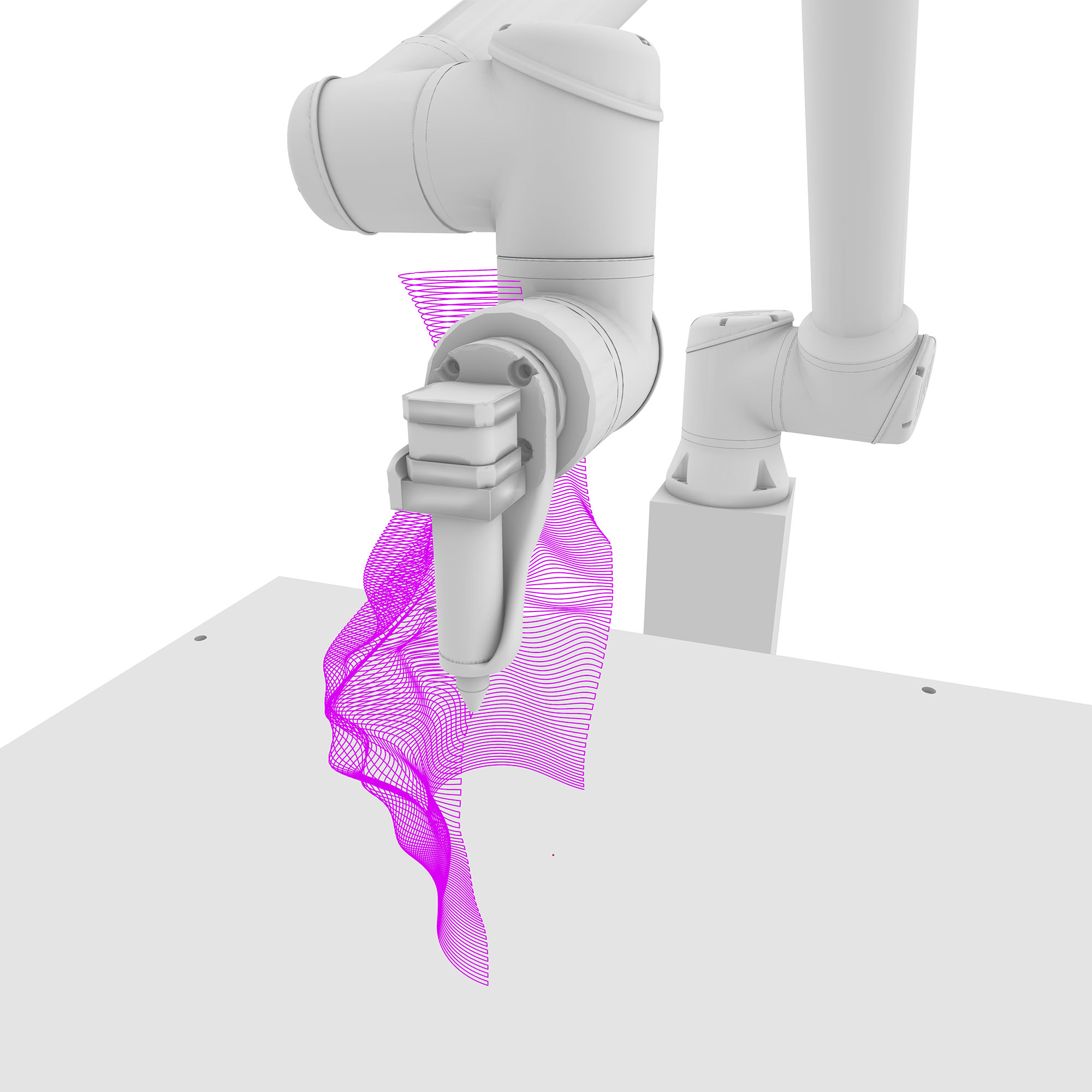
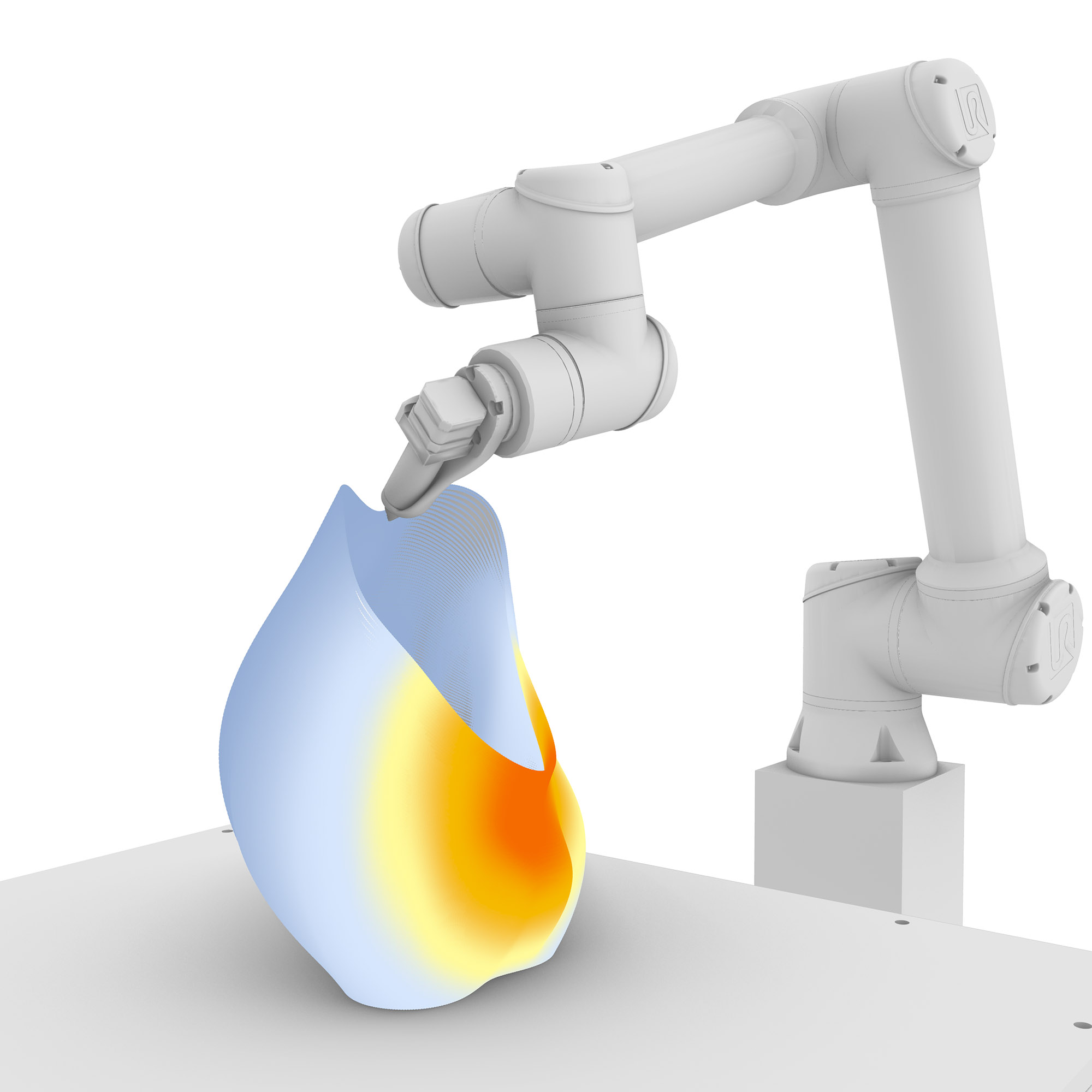
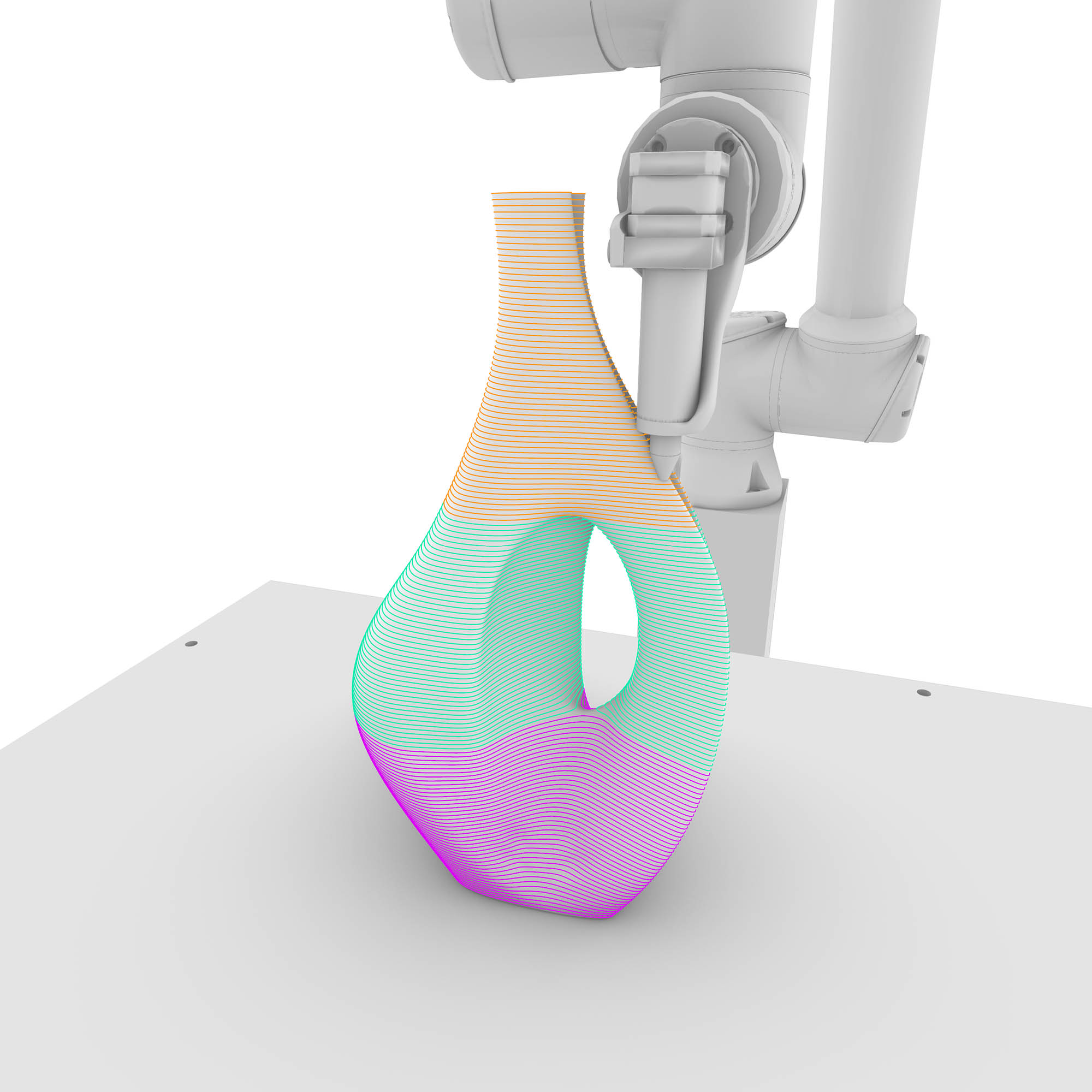
开源Grasshopper定义,用于UR机械臂3D打印,适配多种挤出工艺。
用于UR机器人手臂3D打印的开源Grasshopper定义,适用于多种挤出工艺。
项目特点
**开源免费**:所有 Grasshopper 定义完全开源,遵循 CC BY-NC-SA 4.0 许可,可自由使用、修改和分享。
**模块化设计**:提供多个专用脚本,涵盖基础打印、开放曲线、接缝调整、曲线跳跃、非平面挤出和可调速度等场景。
**详细文档**:每个脚本都包含丰富的注释和插图,帮助用户快速上手和定制。
**通用基础**:所有脚本共享相同的工具和系统基础设置,包括机器人选择、速度和挤出率参数设置,以及统一的用户界面。
**持续更新**:项目将持续添加更多脚本和功能。
技术规格
| 目标机器人 | UR10e(兼容其他6轴机械臂) |
|---|---|
| 软件平台 | Rhinoceros 3D Grasshopper |
| 核心插件 | Robots (by Visose) |
| 辅助插件 | Flexibility, Pufferfish, Parakeet, Human |
| 硬件要求 | 机械臂、挤出机、挤出机控制器盒 |
| 挤出工艺 | 多种挤出工艺(如粘土、塑料等) |
| 许可证 | CC BY-NC-SA 4.0 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| UR10e 或兼容6轴机械臂 | 1 | — | 核心硬件 |
| 适配的挤出机(如粘土、塑料等) | 1 | — | 根据工艺选择 |
| 挤出机控制器盒 | 1 | — | 参考作者其他项目 |
| Rhinoceros 3D + Grasshopper | 1 | — | 商业软件 |
| Robots (Visose) | 1 | — | 必需 |
| Flexibility | 1 | — | 可选但推荐 |
| Pufferfish | 1 | — | 可选但推荐 |
| Parakeet | 1 | — | 可选但推荐 |
| Human | 1 | — | 可选但推荐 |
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 2/5
⚪ 感知与观察: 3/5
⚪ 数理与计算: 4/5
⚪ 动手与操作: 5/5
⚪ 狂热与坚持: 3/5
⚪ 创造与创新: 4/5
项目图库









所需技能
🔧 **动手能力**:需要具备机械臂安装、调试和挤出机硬件连接的能力,以及基本的电子元件焊接和测试技能。
💻 **编程能力**:需要熟悉 Grasshopper 可视化编程环境,理解参数化设计逻辑,并能根据需求修改和扩展脚本。
⚡ **电子电路**:需要了解挤出机控制器的接线和调试,能够使用万用表等工具进行故障排查。
适用场景
**建筑与设计研究**:用于探索机器人3D打印在建筑构件、艺术装置和定制化设计中的应用。
**材料实验**:适用于粘土、塑料等不同材料的挤出工艺测试和优化。
**教育与培训**:作为机器人3D打印的教学工具,帮助学生理解机械臂编程和参数化设计。
**原型制作**:快速制作复杂几何形状的原型,特别是需要非平面挤出或可变速度的场景。