开源谐波机械臂
Open-Harmonic-Arm
机器人电机驱动板
3/5
🧩 软硬件结合
已发布

项目简介
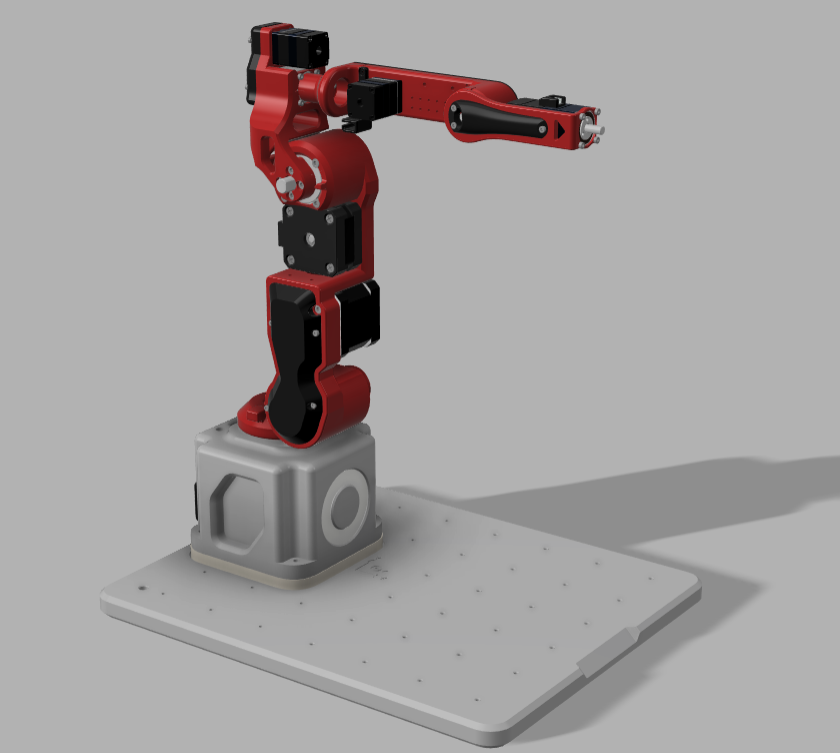
模块化开源机械臂项目,聚焦谐波驱动、分布式CAN架构及全技术栈。
Open-Harmonic-Arm 是一个基于谐波减速驱动和分布式CAN总线架构的开源模块化机械臂项目。该项目旨在通过严谨的工程方法论,设计、验证并文档化一套专业级机械臂架构。其核心愿景是打造一个从需求分析、解析建模、实验验证到迭代优化的完整系统工程闭环,为机器人爱好者和工程师提供一个高质量、可复现的参考设计。
项目特点
**模块化设计**:采用模块化结构,便于组装、维护和扩展。
**谐波减速驱动**:核心驱动方案采用谐波减速器,具有高精度、高扭矩、零背隙等优点。
**分布式CAN总线架构**:使用CAN总线进行分布式通信,简化布线,提高系统可靠性和可扩展性。
**严谨的工程方法**:遵循需求驱动设计、分析建模、实验验证和迭代优化的系统工程流程。
**开源与文档化**:所有设计文件、固件和文档均开源,便于学习、复刻和改进。
技术规格
| 驱动方式 | 谐波减速驱动 |
|---|---|
| 通信架构 | 分布式 CAN 总线 |
| 结构材料 | 3D打印(原型阶段) |
| 项目状态 | 活跃开发中 |
| 主要目录 | docs/, hardware/, firmware/, experiments/, simulations/ |
项目资源
搜索资源
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 4/5
⚪ 表达与交流: 2/5
⚪ 感知与观察: 2/5
🔵 数理与计算: 4/5
🔵 动手与操作: 5/5
🔵 狂热与坚持: 5/5
🔵 创造与创新: 4/5
项目图库
所需技能
🔧 **动手能力**:需要较强的动手能力,能够组装和调试3D打印的机械结构,以及焊接和调试电子电路。
💻 **编程能力**:需要具备嵌入式C/C++编程能力,用于编写和调试电机控制、CAN总线通信等固件。
⚡ **电子电路**:需要理解电机驱动、CAN总线收发器、电源管理等电路原理,能够进行电路设计和故障排查。
适用场景
**机器人研究**:作为研究谐波驱动、CAN总线架构和机器人控制的实验平台。
**创客与教育**:适合高级创客、机器人爱好者或高校学生深入学习机器人技术。
**原型开发**:可用于验证新的机械臂设计或控制算法。
**工业应用探索**:为开发低成本、高性能的协作机器人提供参考设计。