开源摆线减速机器人关节模组
open-cycloidal-actuator
关节电机驱动板
3/5
🧩 软硬件结合
已发布
项目简介
开源机器人执行器,采用摆线驱动、BLDC电机和FOC控制。
这是一个面向机器人领域的高性能开源执行器项目,核心设计围绕摆线减速器(Cycloidal Drive)、无刷直流电机(BLDC)以及磁场定向控制(FOC)三大技术展开。项目目前处于持续开发阶段,旨在为机器人开发者提供一种结构紧凑、扭矩密度高且成本可控的关节驱动方案。
项目特点
采用摆线减速器,具有高刚度、高精度、高减速比和抗冲击能力强的特点。
使用无刷直流电机(BLDC),效率高、寿命长、噪音低。
基于磁场定向控制(FOC)算法,实现平滑、高效、低噪音的电机控制。
开源设计,所有机械和电子设计文件均可获取,便于修改和定制。
模块化设计,易于集成到各种机器人平台中。
技术规格
| 减速器类型 | 摆线减速器 (Cycloidal Drive) |
|---|---|
| 电机类型 | 无刷直流电机 (BLDC) |
| 控制方式 | 磁场定向控制 (FOC) |
| 项目状态 | 开发中 (Work in progress) |
| 开源范围 | 机械设计、电子设计、控制代码 |
项目资源
搜索资源
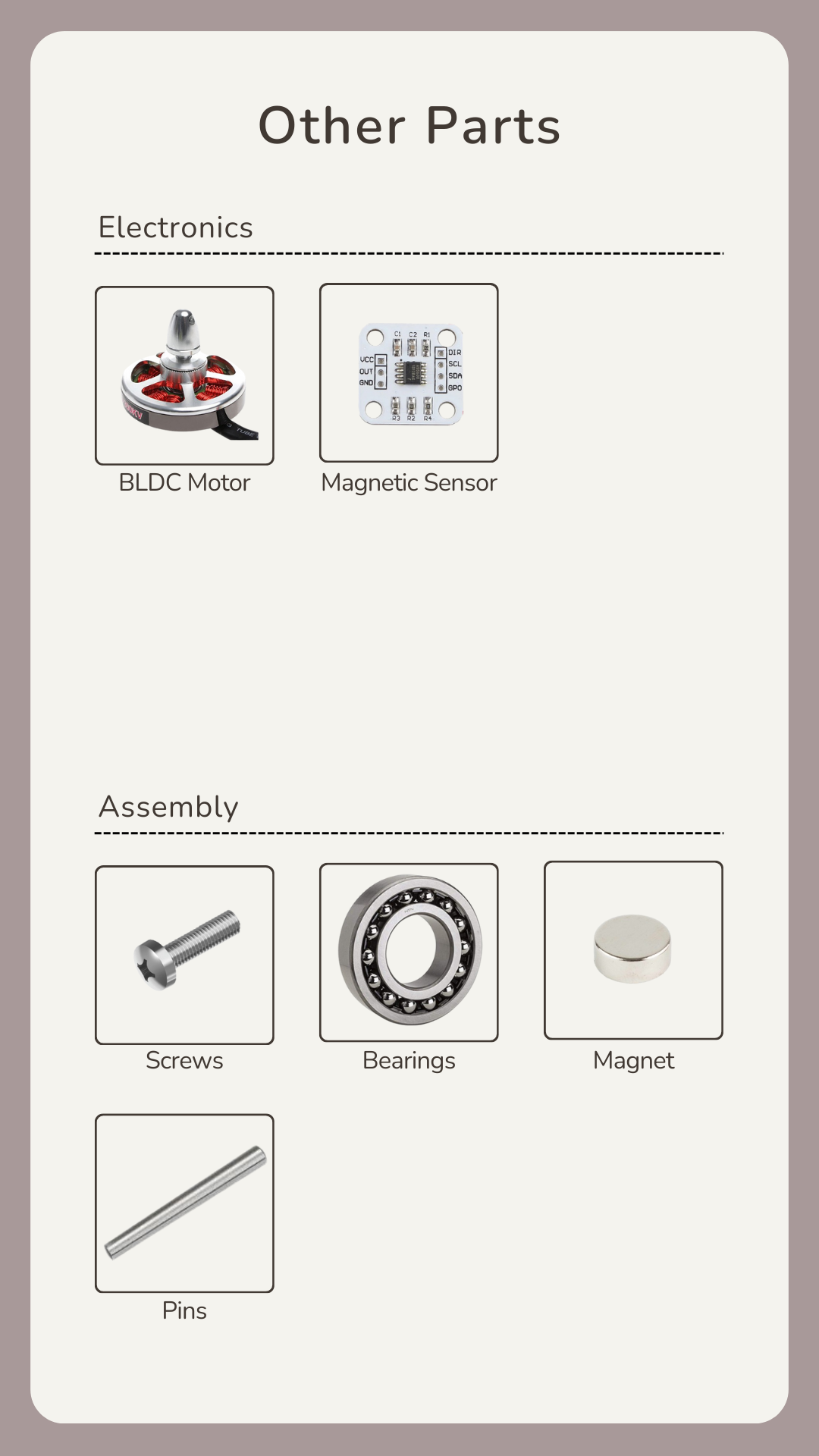
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 摆线减速器组件 | 1 | — | 包括摆线盘、针齿壳、输出盘等 |
| 电机定子 | 1 | — | 无刷直流电机定子 |
| 电机转子 | 1 | — | 无刷直流电机转子 |
| 轴承 | 若干 | — | 支撑旋转部件 |
| 外壳 | 1 | — | 3D打印或CNC加工 |
| 电机驱动板 | 1 | — | 支持FOC控制 |
| 磁编码器 | 1 | — | 用于位置反馈 |
| 微控制器 | 1 | — | 运行FOC算法 |
| 连接线缆 | 若干 | — | 电源和信号线 |
3D 模型
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
🔵 数理与计算: 4/5
🔵 动手与操作: 4/5
⚪ 狂热与坚持: 3/5
⚪ 创造与创新: 3/5
项目图库

所需技能
🔧 **动手能力**:需要具备机械组装、3D打印后处理、电子焊接等动手能力。
💻 **编程能力**:需要具备嵌入式C/C++编程能力,熟悉FOC控制算法和电机驱动库(如SimpleFOC)。
⚡ **电子电路**:需要了解BLDC电机驱动原理、编码器接口、电源管理等电路知识。
适用场景
机器人关节(如机械臂、四足机器人、人形机器人)
高精度定位平台
需要紧凑、高扭矩输出的自动化设备
机器人教育和研究平台