循迹避障机器人
Line-Follower-Robot
机器人电机驱动板
3/5
🧩 软硬件结合
已发布

项目简介
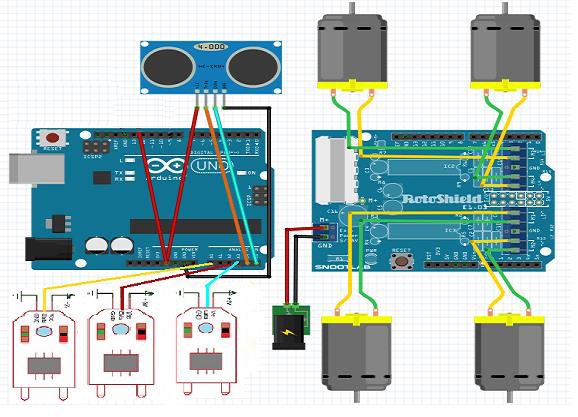
基于Arduino UNO和L293D电机驱动板的巡线机器人。
A line follower robot built using Arduino UNO and L293D Motor Driver Shield.
标签
项目特点
可沿黑色线条在白色表面自主行驶
支持多种角度的转弯
集成超声波传感器,可检测前方障碍物并自动避让
支持通过特定信号启动或停止
可用于工业自动化等场景的演示与教学
技术规格
| 主控板 | Arduino UNO |
|---|---|
| 电机驱动 | L293D Motor Driver Shield |
| 电机 | 4个100 RPM直流减速电机 |
| 传感器 | IR传感器模块(循迹) + 超声波传感器(避障) |
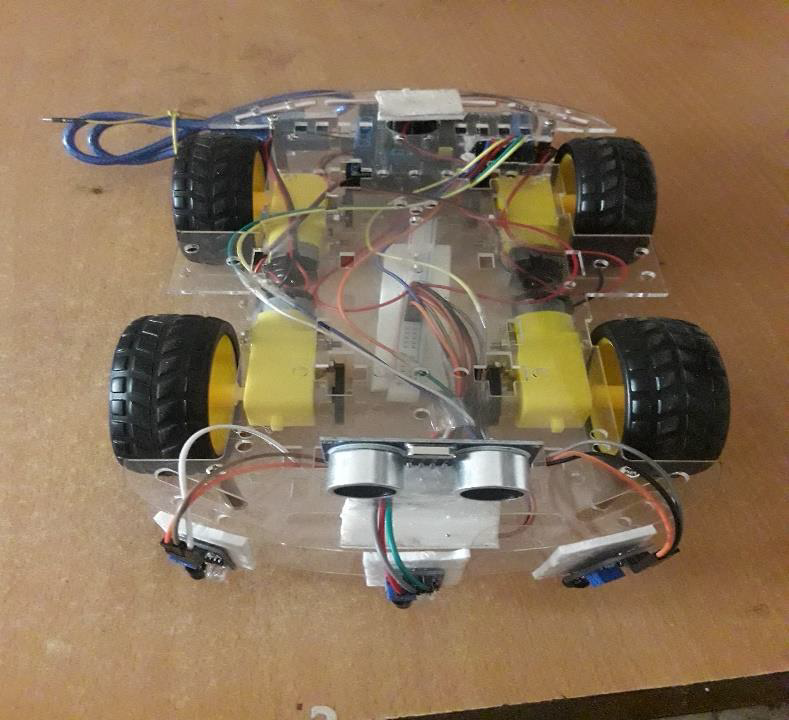
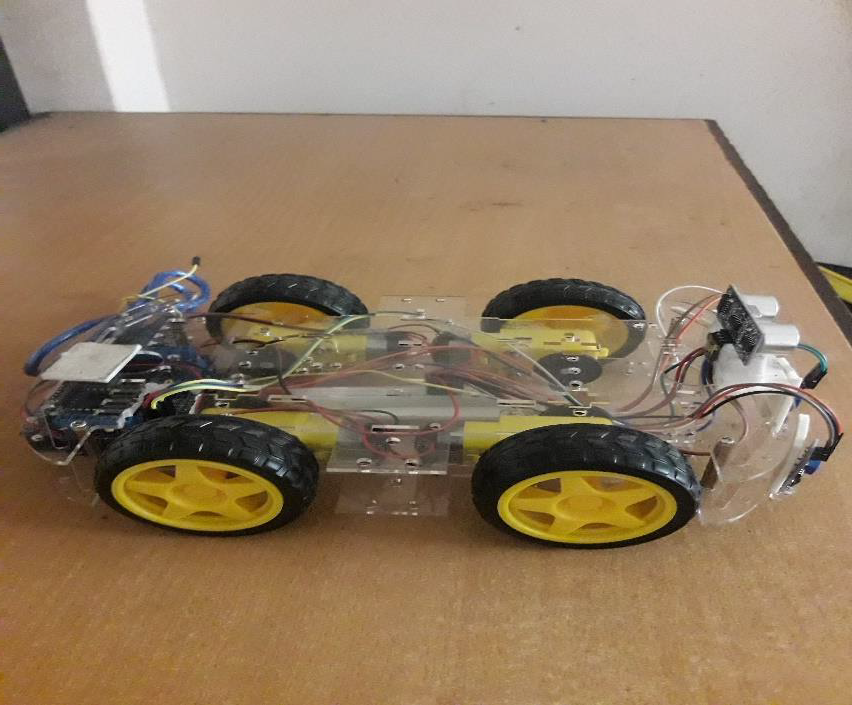
| 底盘 | 标准机器人底盘 |
| 电源 | 电池供电(具体规格详见项目文档) |
| 编程环境 | Arduino IDE |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Arduino UNO | 1 | — | |
| L293D Motor Driver Shield | 1 | — | |
| 100 RPM直流减速电机 | 4 | — | |
| 机器人底盘 | 1 | — | 含车轮 |
| IR传感器模块 | 2 | — | 循迹用 |
| 超声波传感器 | 1 | — | 避障用 |
| 电池/电池盒 | 1 | — | 为Arduino和电机供电 |
| 杜邦线/跳线 | 若干 | — | |
| 双面胶 | 1卷 | — | 固定部件 |
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 2/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
🔵 数理与计算: 2/5
🔵 动手与操作: 3/5
⚪ 狂热与坚持: 2/5
⚪ 创造与创新: 2/5
项目图库
所需技能
🔧 **动手能力**:需要组装底盘、固定电机、连接传感器和电机驱动板,适合初学者练习硬件搭建。
💻 **编程能力**:需使用Arduino IDE编写控制逻辑(循迹、避障、电机控制),基础C/C++知识即可。
⚡ **电子电路**:需要理解Arduino引脚连接、L293D电机驱动原理、传感器接线,但难度较低。
适用场景
机器人入门教学与学习项目
学校STEM/创客课程实践
工业自动化演示(如AGV小车原型)
机器人竞赛基础平台