摇杆控制车
JoyStick-Controller-Car
机器人电机驱动板、舵机驱动板
3/5
🧩 软硬件结合
已发布
项目简介
用两个ESP32构建响应式4WD机器人及遥控器,利用快速无连接ES。
这是一个基于ESP32微控制器的开源机器人项目,名为「JoyStick-Controller-Car」,它通过ESP-NOW无线协议实现了一个四轮驱动(4WD)遥控小车的完整制作方案。项目的核心亮点在于使用两块ESP32开发板分别作为遥控器和接收器,借助ESP-NOW协议实现低延迟、无需Wi-Fi网络的点对点通信,解决了传统蓝牙或Wi-Fi遥控方案中连接不稳定、配对繁琐的问题。
项目特点
**无线控制**:利用ESP-NOW协议实现低延迟通信。
**4WD电机控制**:支持全向控制(前进、后退、左转、右转)。
**双舵机控制**:摇杆上的专用触发器控制两个舵机,用于附件操作。
**故障安全机制**:如果机器人失去来自发射器的信号超过一秒,将自动停止。
**模块化代码**:项目分为两个清晰的部分:`Transmitter.ino`(遥控器)和`Receiver.ino`(机器人)。
技术规格
| 主控芯片 | 2 x ESP32 开发板 |
|---|---|
| 通信协议 | ESP-NOW (点对点,无需Wi-Fi) |
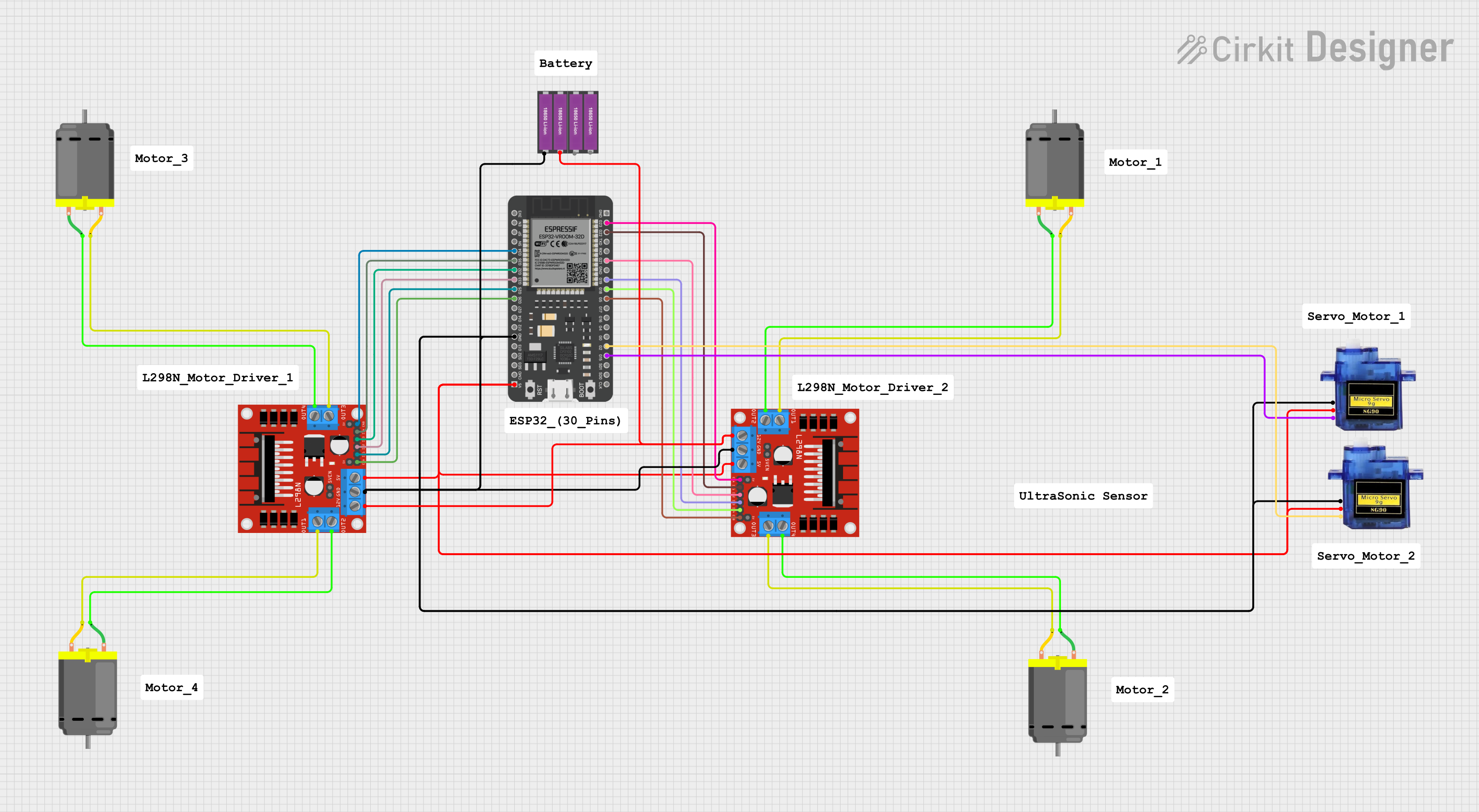
| 电机驱动 | 2 x L298N 双H桥电机驱动器 |
| 电机数量 | 4 x 直流电机(带轮子) |
| 舵机数量 | 2 x 舵机 (如 SG90) |
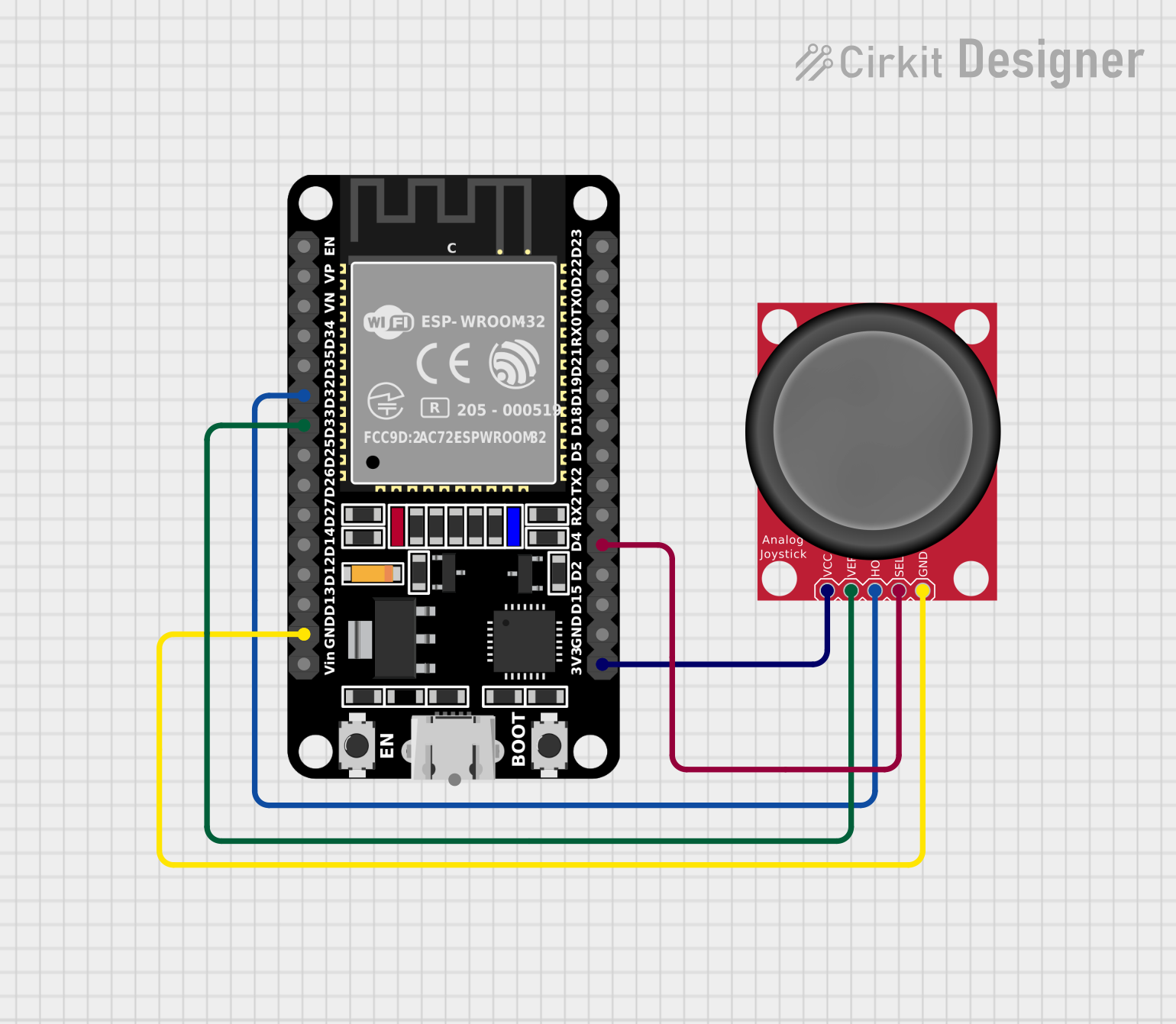
| 遥控输入 | 1 x 模拟摇杆模块 (KY-023) |
| 供电 | 外部电源 (如 7.4V LiPo 电池或 9V-12V 电池组) |
| 故障安全 | 信号丢失 >1秒 自动停止 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| ESP32 开发板 | 2 | — | 一个用于遥控器,一个用于机器人 |
| 模拟摇杆模块 (KY-023) | 1 | — | 用于遥控器 |
| L298N 双H桥电机驱动器 | 2 | — | 用于驱动4个直流电机 |
| 直流电机(带轮子) | 4 | — | 用于机器人移动 |
| 舵机 (如 SG90) | 2 | — | 用于附件(如抓取器或摄像头) |
| 机器人底盘 | 1 | — | 用于安装所有部件 |
| 外部电源 (7.4V LiPo 或 9V-12V 电池组) | 1 | — | 为机器人供电 |
| 面包板和杜邦线 | 若干 | — | 用于电路连接 |
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
⚪ 数理与计算: 3/5
⚪ 动手与操作: 4/5
⚪ 狂热与坚持: 3/5
⚪ 创造与创新: 3/5
项目图库
所需技能
🔧 **动手能力**:需要组装机器人底盘、连接电机驱动器和舵机、进行面包板或焊接电路。
💻 **编程能力**:需要会使用Arduino IDE,配置ESP32开发环境,修改代码中的MAC地址,并上传固件。
⚡ **电子电路**:需要了解如何连接L298N电机驱动器、直流电机、舵机和摇杆模块到ESP32,并理解电源供电方案。
适用场景
**机器人入门学习**:适合学习ESP32、ESP-NOW协议和机器人控制原理。
**DIY遥控车**:可以制作一个响应灵敏的4WD遥控车。
**多功能机器人平台**:利用双舵机接口,可以扩展为带机械臂的漫游车或摄像头云台。