Arduino人形跟随机器人
human-following-robot-arduino
机器人电机驱动板
3/5
🧩 软硬件结合
已发布

项目简介
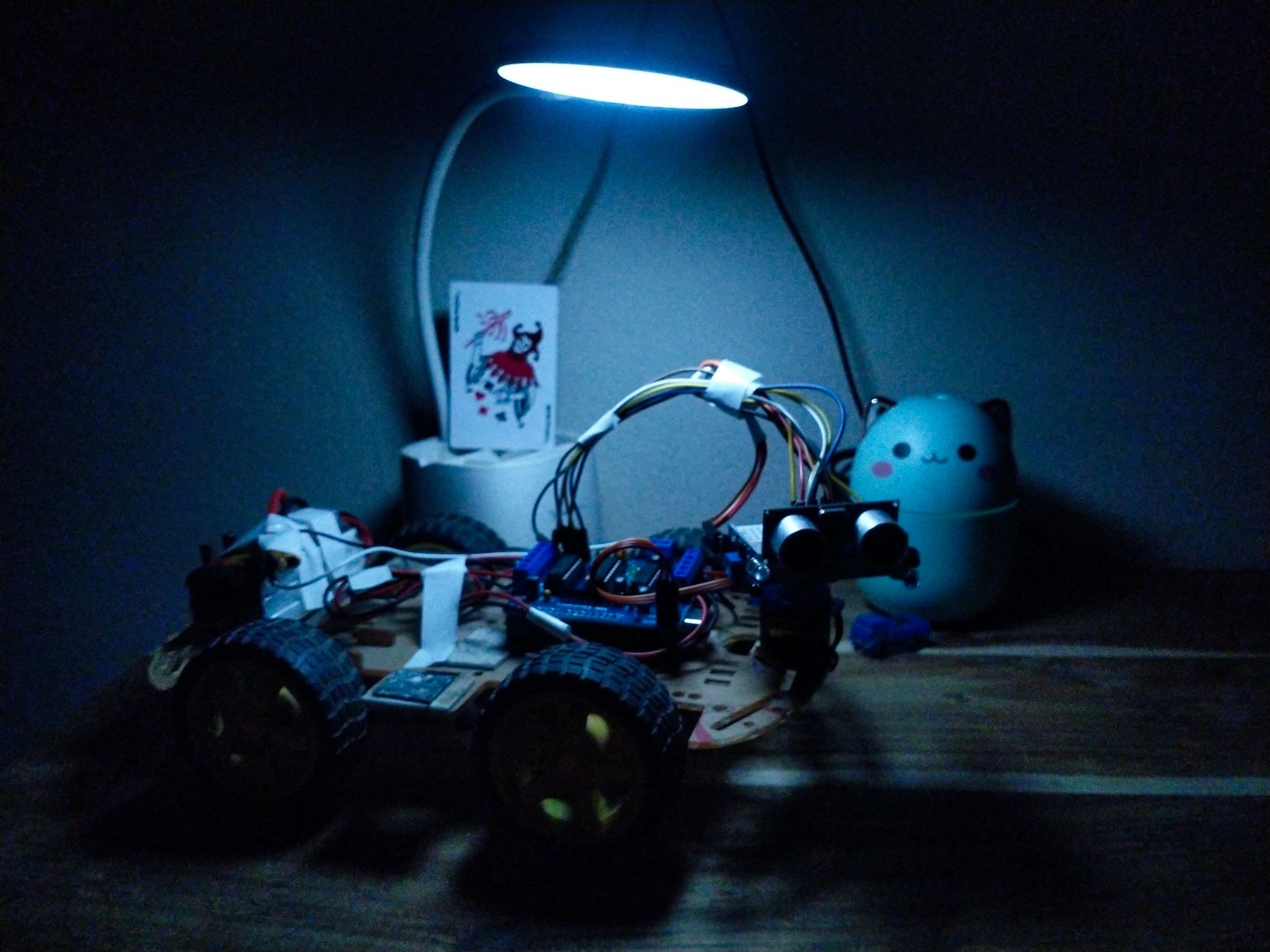
Arduino人体跟随机器人,使用红外、超声波传感器和电机驱动板。
这是一个基于Arduino平台开发的智能跟随机器人项目,核心功能是让机器人能够自动识别并跟随前方的人类目标。项目通过融合超声波传感器与红外传感器的数据,实现了精准的测距与方向判断,从而驱动四轮底盘完成流畅的跟随动作。其工作原理清晰:超声波传感器持续测量前方障碍物的距离,当检测到有效目标时,左右两侧的红外传感器会判断目标偏离方向,机器人据此优先调整行进方向,再根据距离值控制电机速度,确保跟随过程平滑自然。如果目标超出设定范围或丢失,机器人会立即停止,避免盲目移动。
标签
项目特点
使用超声波传感器(HC-SR04)测量前方人体距离
左右红外传感器检测人体偏移方向,实现精准转向
L293D 电机驱动板控制四个直流电机,驱动力强
伺服电机固定超声波传感器,保持前方检测
逻辑优先进行方向修正,再根据距离控制前进/停止
电机速度根据距离动态调整,跟随平滑
代码优化,易于理解和修改
技术规格
| 主控板 | Arduino Uno |
|---|---|
| 电机驱动 | L293D Motor Driver Shield |
| 超声波传感器 | HC-SR04 |
| 红外传感器 | 2 个 |
| 直流电机 | 4 个 |
| 伺服电机 | SG90 或等效 |
| 电源 | 7–12V 电池组 |
| 底盘 | 机器人底盘 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Arduino Uno | 1 | — | |
| L293D Motor Driver Shield | 1 | — | |
| HC-SR04 超声波传感器 | 1 | — | |
| 红外传感器 | 2 | — | 左右各一 |
| 直流电机 | 4 | — | |
| SG90 或等效 | 1 | — | 固定超声波传感器 |
| 7–12V 电池组 | 1 | — | 为电机供电 |
| 机器人底盘 | 1 | — | |
| 杜邦线/跳线 | 若干 | — | |
| 面包板(可选) | 1 | — | 用于原型搭建 |
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
⚪ 数理与计算: 2/5
⚪ 动手与操作: 4/5
⚪ 狂热与坚持: 3/5
⚪ 创造与创新: 2/5
项目图库
所需技能
🔧 **动手能力**:能够组装机器人底盘、连接传感器和电机、固定伺服电机
💻 **编程能力**:熟悉 Arduino IDE,能安装库、编写和上传代码
⚡ **电子电路**:了解基本电路连接(VCC、GND、信号线),能使用万用表测试
适用场景
机器人入门学习项目
智能跟随小车制作
创客空间/学校机器人竞赛
自动化搬运演示