BackSeatDriver - Arduino自主机器人控制库
back-seat-driver
机器人电机驱动板、舵机驱动板
3/5
🧩 软硬件结合
已发布

项目简介
C++自主Arduino机器人控制库,支持非阻塞驱动多种机器人。
BackSeatDriver 是一个专为 Arduino 平台设计的开源库,旨在帮助开发者快速构建具备自主避障能力的智能小车。它的核心价值在于提供了一套**非阻塞式**的命令 API,让开发者能够以简洁、高效的方式控制机器人执行前进、后退、转向等动作,而无需担心程序因 `delay()` 函数而卡死。
项目特点
**非阻塞控制**:所有机动动作(前进、后退、转向)均不阻塞程序执行,允许在动作进行期间处理其他任务(如传感器读取)。
**回调机制**:支持在机动动作完成后自动调用用户定义的回调函数,便于实现复杂的决策链(如避障算法)。
**适配器模式**:通过 `TwoServoAdapter` 和 `DCMotorAdapter` 两种适配器,支持双舵机和直流电机(2/4轮)两种常见机器人平台。
**速度与转向可调**:可独立调整移动速度和转向速度的百分比系数,以及转向延迟系数,适应不同机器人的物理特性。
**调试模式**:内置调试输出功能,可将机器人的实时状态(速度、转向角度、时间戳)发送到串口,便于调试。
**易于扩展**:用户可编写自定义适配器以支持特殊电机类型,而无需修改核心控制逻辑。
技术规格
| 开发平台 | Arduino (Uno, Mega 等) |
|---|---|
| 编程语言 | C++ |
| 支持的电机类型 | 双舵机 (Servo) / 直流电机 (DC Motor, 2或4轮) |
| 控制方式 | 非阻塞式 (无 `delay()` 函数) |
| 回调函数类型 | `void(*maneuverCallback)(uint8_t type, signed short parameter)` |
| 速度控制范围 | 0% - 100% (百分比) |
| 转向角度范围 | 任意角度 (正为右转,负为左转) |
| 转向延迟系数 | 默认 7 (毫秒/度) |
| 调试输出 | 串口 (Serial) |
| 依赖库 | Arduino Servo 库 (舵机模式) / Adafruit Motor Shield V2 库 (直流电机模式) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| Arduino (Uno/Mega 等) | 1 | — | 任何兼容 Arduino 的开发板 |
| 舵机 (Servo) | 2 | — | 适用于双舵机机器人 |
| 直流电机 (DC Motor) | 2-4 | — | 适用于直流电机机器人 |
| Adafruit Motor Shield V2 | 1 | — | 推荐用于直流电机机器人 |
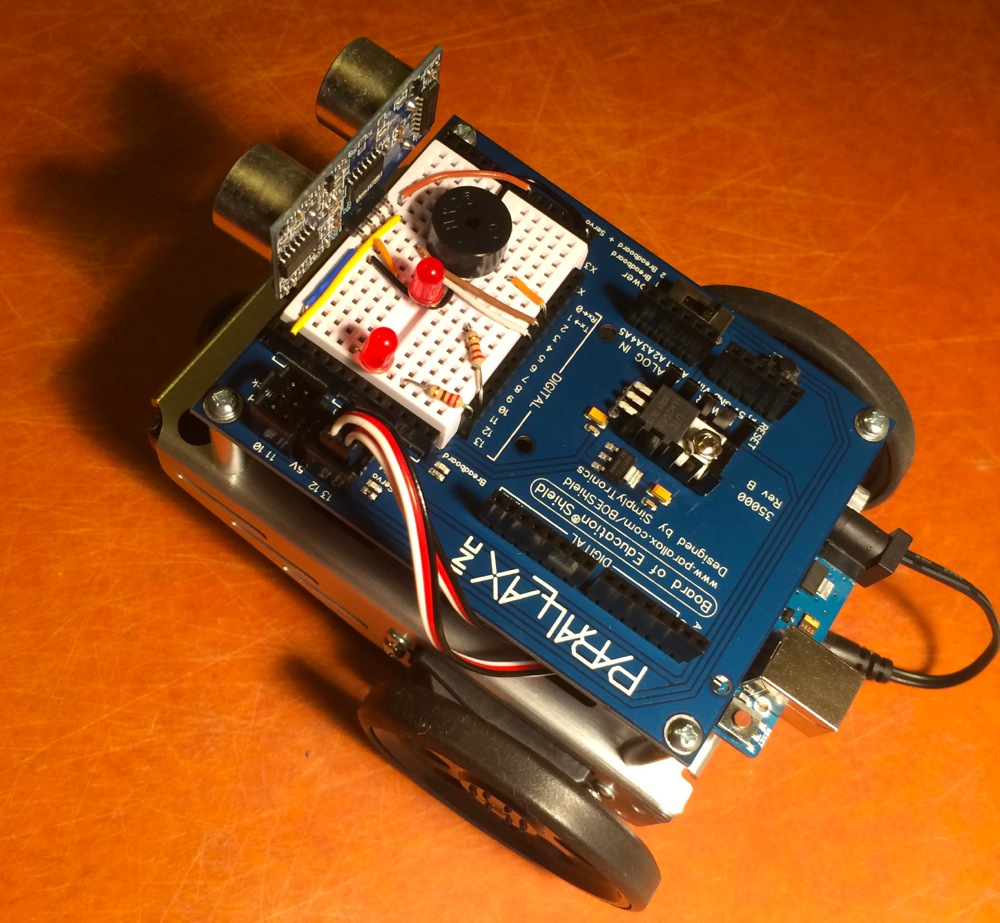
| 超声波测距模块 (如 HC-SR04) | 1 | — | 用于避障 |
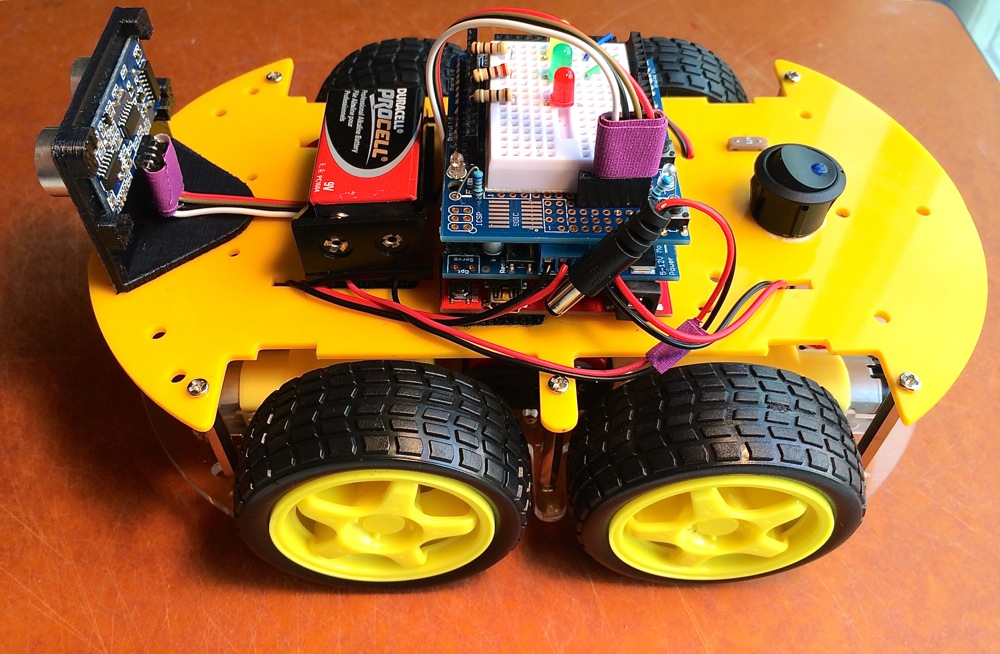
| 5 x 1.5V AA 电池盒 | 1 | — | 提供 7.5V 约 1A 电源 |
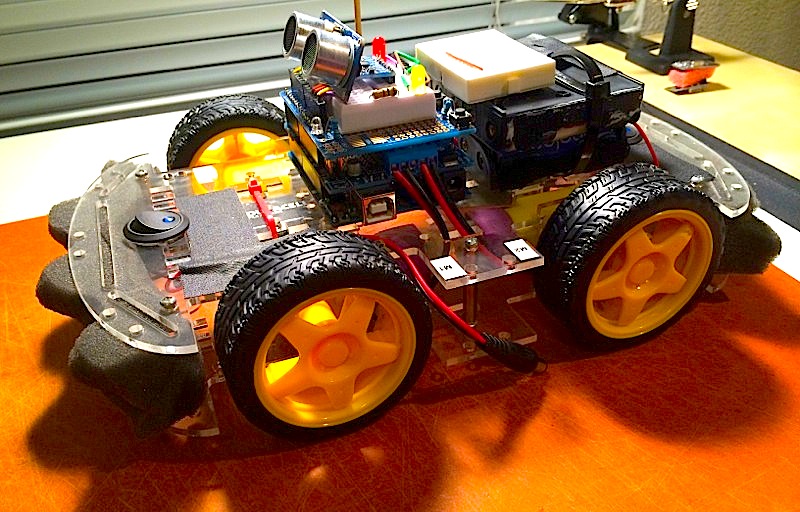
| 机器人底盘/框架 | 1 | — | 如 Parallax 套件或 dx.com 框架 |
| 杜邦线/跳线 | 若干 | — | 用于电路连接 |
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
⚪ 数理与计算: 3/5
⚪ 动手与操作: 4/5
⚪ 狂热与坚持: 3/5
⚪ 创造与创新: 3/5
项目图库
所需技能
🔧 **动手能力**:需要具备基本的电子焊接、电路连接和机械组装能力,能够搭建机器人底盘、连接电机和传感器。
💻 **编程能力**:需要掌握 C/C++ 基础,熟悉 Arduino IDE 的使用,能够理解函数指针、回调函数等概念。
⚡ **电子电路**:需要了解 Arduino 引脚功能、电机驱动原理(如 H 桥)、电源管理以及超声波传感器的工作原理。
适用场景
**教育机器人**:用于 Arduino 机器人教学,帮助学生理解自主控制、传感器融合和编程逻辑。
**避障小车竞赛**:作为基础框架,快速搭建具备避障功能的竞赛小车。
**机器人原型开发**:为更复杂的自主机器人项目(如 SLAM、路径规划)提供底层运动控制基础。
**DIY 创客项目**:爱好者自制智能小车,体验从硬件搭建到软件调试的完整过程。