RB3204-RBCX 通用机器人控制器
RB3204-RBCX
ESP32
3/5
🧩 软硬件结合
已发布

项目简介
RBCX是通用机器人控制器,RB3201-RBControl的升级版,用于Robotk机器人。
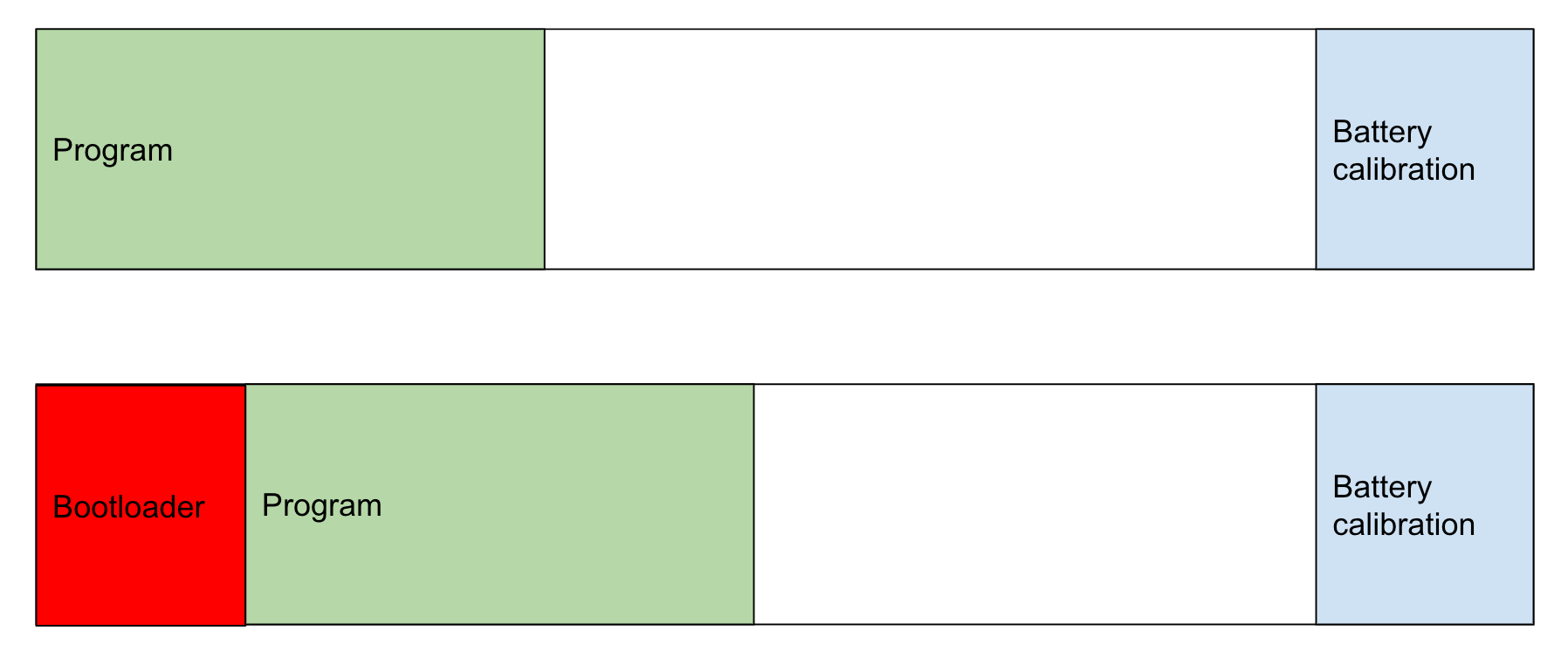
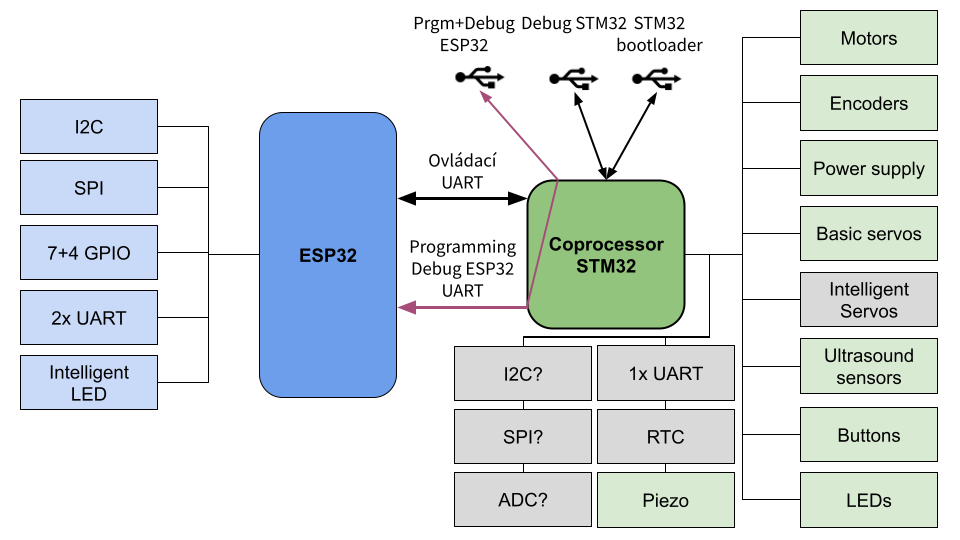
RBCX 是一款面向业余机器人爱好者的通用控制器,作为 RB3201-RBControl 的升级版本,专为简化机器人开发流程而设计。该项目由 RoboticsBrno 团队维护,并成功应用于 Robotka 机器人及 2020 年机器人夏令营中。RBCX 的核心优势在于其双处理器架构:主控采用 STM32F103VC(ARM Cortex-M3,72MHz),负责电机控制、传感器读取等底层实时任务;协处理器为 ESP32-DevKitC,专门处理与手机 App 通信、发送高级指令等上层逻辑,两者通过 UART 协同工作。硬件接口极为丰富,支持 4 路带编码器的直流电机、4 路带反馈的舵机、4 个 LED、游戏手柄接口按键、智能舵机接口、压电蜂鸣器、RTC 实时时钟、超声波测距接口、I2C 总线、OLED 显示屏接口、加速度计与陀螺仪,以及 micro USB 和 USB-C 双接口。它还配备电池接口(不含充电电路),方便移动部署。技术栈方面,STM32 端使用 C++ 编程,基于 FreeRTOS 实时操作系统和 STM32Cube 框架,通过 Platform.io 进行开发,并采用自研的 sboot_stm32 引导加载程序。RBCX 解决了业余机器人在电机控制、传感器集成和无线通信方面的碎片化难题,特别适合教育机器人、竞赛机器人、DIY 智能小车等场景,让开发者能快速搭建原型,无需从零设计电路和底层驱动。
标签
项目特点
双处理器架构:STM32F103VC(底层控制)+ ESP32(高层通信与逻辑),分工明确,性能强劲
4路直流电机驱动(带编码器反馈),支持精确的速度和位置控制
4路舵机接口(带ADC反馈),可实时读取舵机角度
板载加速度计/陀螺仪(IMU),支持姿态感知
支持多种外设扩展:I2C、超声波传感器、OLED显示屏、智能舵机
丰富的通信接口:micro USB、USB-C、UART,支持与手机App通信
基于Platform.io开发,使用C++、FreeRTOS和STM32Cube框架
提供自定义bootloader,方便固件升级
技术规格
| 主控芯片 | STM32F103VC (ARM Cortex-M3, 72MHz) |
|---|---|
| 协处理器 | ESP32-DevKitC |
| RAM | 48 KiB (STM32) |
| Flash | 256 KiB (STM32) |
| 直流电机驱动 | 4路,带编码器接口 |
| 舵机接口 | 4路,带ADC反馈 |
| 智能舵机接口 | 1路 |
| LED | 4个 |
| 蜂鸣器 | 1个(压电式) |
| RTC | 支持 |
| IMU | 加速度计 + 陀螺仪 |
| 显示接口 | OLED显示屏接口 |
| 传感器接口 | I2C、超声波传感器 |
| 通信接口 | micro USB、USB-C、UART |
| 电池接口 | 支持(不含充电电路) |
| 调试接口 | ST-Link |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| STM32F103VC | 1 | — | 主控芯片 |
| ESP32-DevKitC | 1 | — | 模块 |
| 直流电机驱动电路 | 4路 | — | 板载 |
| 舵机接口电路 | 4路 | — | 带ADC反馈 |
| 加速度计/陀螺仪 | 1 | — | 板载IMU |
| OLED显示屏 | 1 | — | 可选外接 |
| 压电蜂鸣器 | 1 | — | 板载 |
| micro USB | 1 | — | 通信/供电 |
| USB-C | 1 | — | 通信/供电 |
| 电池接口 | 1 | — | 不含充电电路 |
| I2C接口 | 若干 | — | 扩展用 |
| 超声波传感器接口 | 1 | — | 扩展用 |
| 智能舵机接口 | 1 | — | 扩展用 |
| 电阻、电容、LED等 | 若干 | — | 板载被动元件 |
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
🔵 数理与计算: 3/5
🔵 动手与操作: 4/5
⚪ 狂热与坚持: 3/5
🔵 创造与创新: 4/5
项目图库






所需技能
🔧 **动手能力**:需要具备PCB焊接、电子元件组装、机器人结构搭建等动手能力。能够使用焊台、万用表等工具进行电路制作和调试。
💻 **编程能力**:需要掌握C++编程,熟悉Platform.io开发环境,了解FreeRTOS实时操作系统和STM32Cube框架。能够编写电机控制、传感器读取、通信协议等底层代码,以及ESP32端的高级应用逻辑。
⚡ **电子电路**:需要理解直流电机驱动原理、舵机控制、编码器信号处理、I2C/UART通信协议等基础知识。能够阅读原理图,进行电路故障排查。
适用场景
业余机器人爱好者制作轮式或履带式机器人
机器人竞赛(如循迹、相扑、迷宫等)
机器人教育(夏令营、工作坊)
智能小车/无人车原型开发
多传感器融合的移动机器人平台