summary: This project involves developing a self-balancing two-wheeled robot using an ATmega328p (Arduino Nano), an MPU6050 gyros
DIY-Self-Balancing-robot-
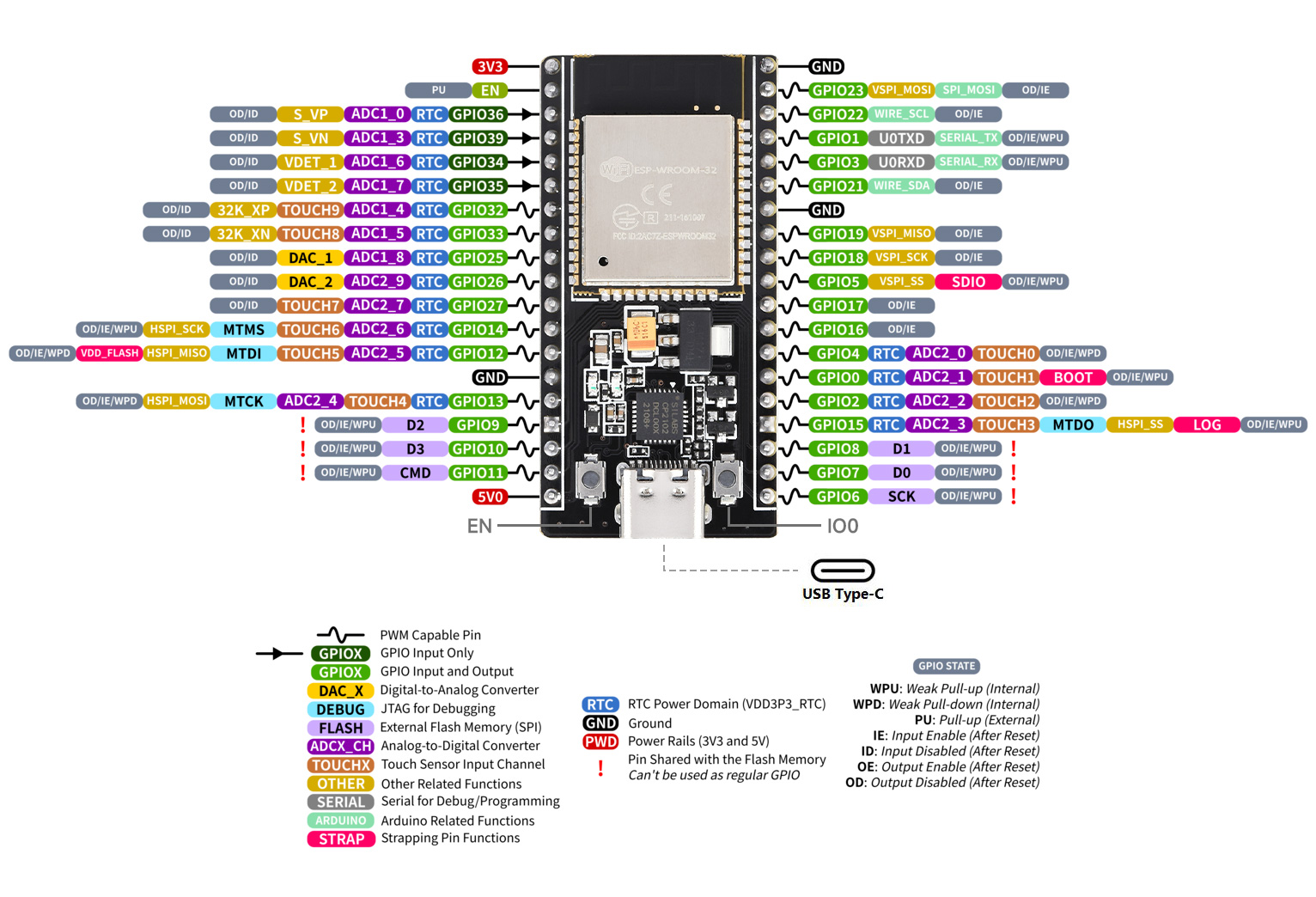
步进电机驱动板
3/5
🧩 软硬件结合
已发布
项目简介
该项目用ATmega328p和MPU6050开发自平衡两轮机器人。
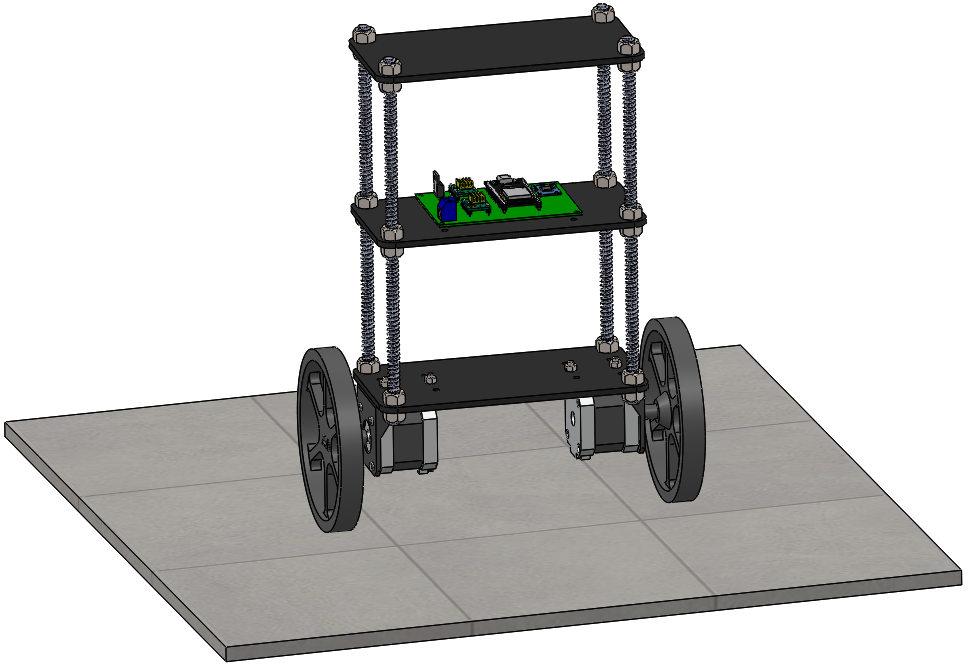
这是一个基于Arduino Nano的开源自平衡机器人项目,由两位开发者共同完成。项目的核心目标是打造一个能够自主保持直立状态的两轮平衡机器人,通过闭环控制系统实现动态稳定。机器人采用Nema 17步进电机作为驱动单元,配合A4988驱动模块,能够精确控制车轮转速。核心传感器为MPU6050六轴陀螺仪加速度计,实时检测机器人的俯仰角度,将数据反馈给ATmega328p微控制器。系统运行PID控制算法,根据角度偏差动态调整电机输出,使机器人能够抵抗外部干扰并维持平衡。
项目特点
**自平衡控制**:基于MPU6050传感器和PID算法实现动态平衡,能抵抗外部扰动。
**手机APP控制**:通过HC-05蓝牙模块和EZ-GUI Ground Station应用实现无线遥控。
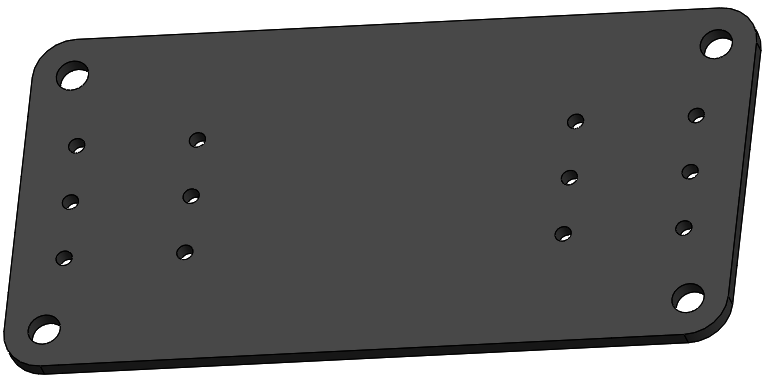
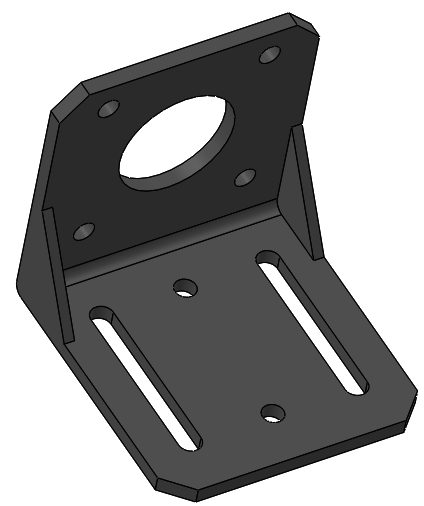
**3D打印结构**:所有结构件(包括车轮、电机支架、多层板)均可3D打印,成本低且易于定制。
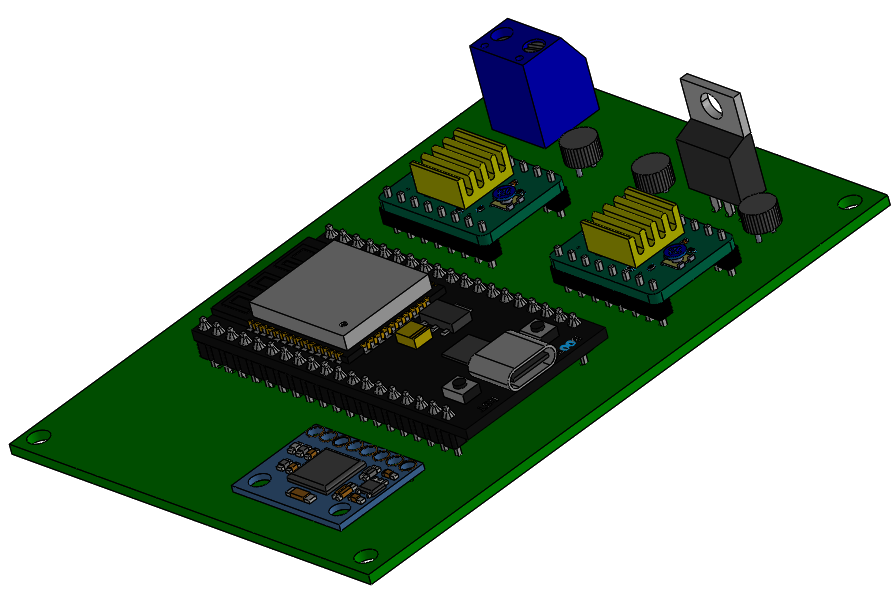
**开源硬件与软件**:提供完整的电路图、PCB设计文件(EasyEDA)和Arduino源代码。
**模块化设计**:电子元件和机械结构均采用模块化设计,便于组装、调试和升级。
技术规格
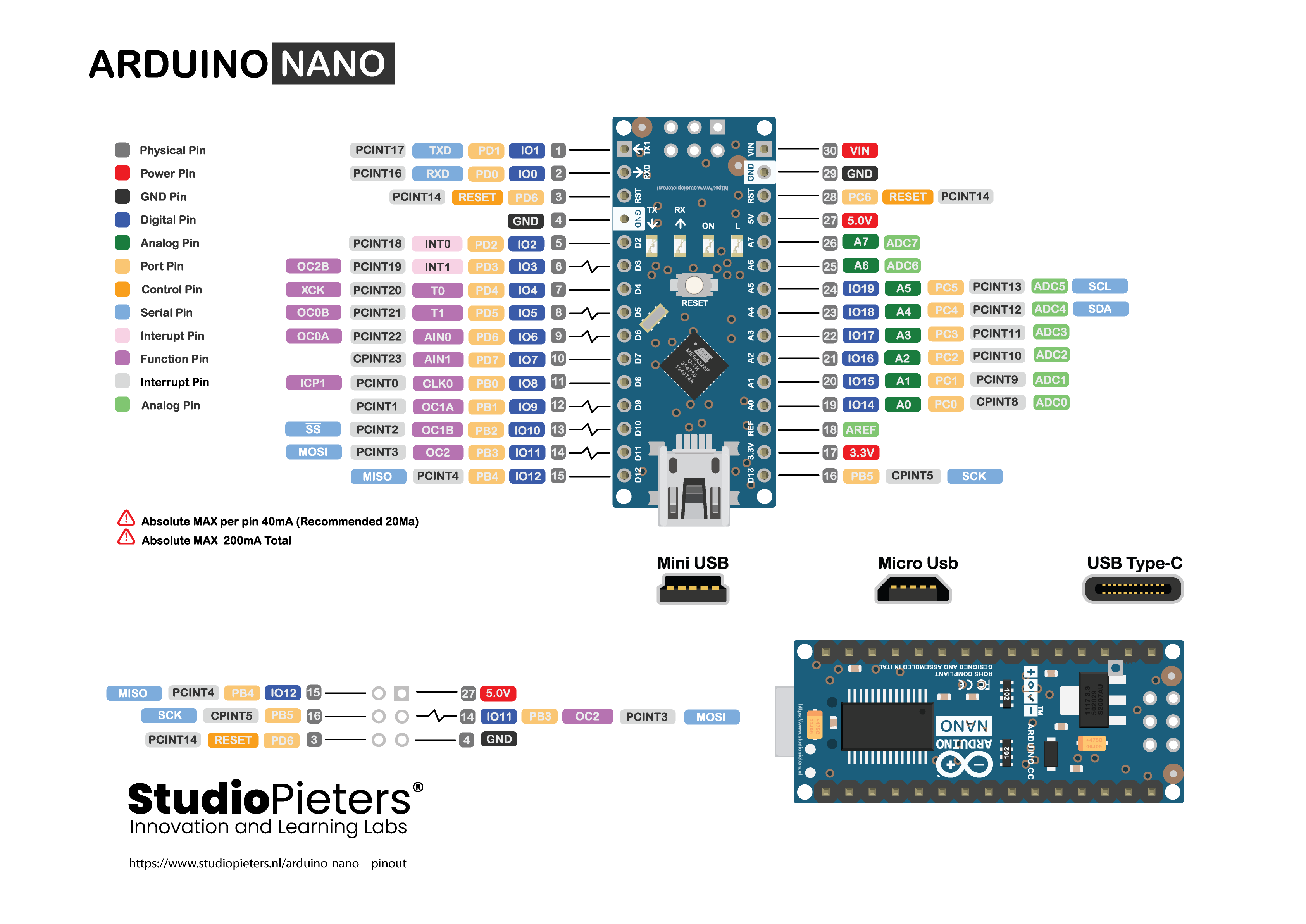
| 主控芯片 | ATmega328p (Arduino Nano) |
|---|---|
| 姿态传感器 | MPU6050 (三轴陀螺仪+加速度计) |
| 执行机构 | 2x NEMA 17 步进电机 |
| 电机驱动 | 2x A4988 步进电机驱动器 |
| 无线通信 | HC-05 蓝牙模块 |
| 电源输入 | 9V - 12V 直流电源 |
| 控制算法 | PID (比例-积分-微分) 闭环控制 |
| 控制方式 | 手机APP (EZ-GUI Ground Station) |
| 结构材料 | PLA/PETG 3D打印耗材 + M8螺纹杆 |
| 尺寸 | 约 200mm x 150mm x 300mm (长宽高,估算) |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| 3D打印件 (车轮、支架、板件、光扩散器) | 7 | — | 详见README |
| M8螺纹杆 (1米) | 1 | — | 用于结构支撑 |
| M8六角螺母 | 24 | — | 用于固定螺纹杆 |
| M4六角螺母 | 12 | — | 用于固定组件 |
| M4十字盘头螺栓 (13mm) | 12 | — | 用于安装电机支架和电路板 |
| M3十字盘头螺栓 (8mm) | 8 | — | 用于固定步进电机支架 |
| Arduino Nano (ATmega328p) | 1 | — | 主控板 |
| MPU6050 模块 | 1 | — | 姿态传感器 |
| A4988 步进电机驱动器 | 2 | — | 需配备散热片 |
| NEMA 17 步进电机 | 2 | — | 驱动轮子 |
| HC-05 蓝牙模块 | 1 | — | 无线通信 |
| 7805T 电压稳压器 | 1 | — | 将输入电压稳压至5V |
| 9V-12V 可充电电池 | 1 | — | 电源 |
| 电源开关 | 1 | — | 控制电源通断 |
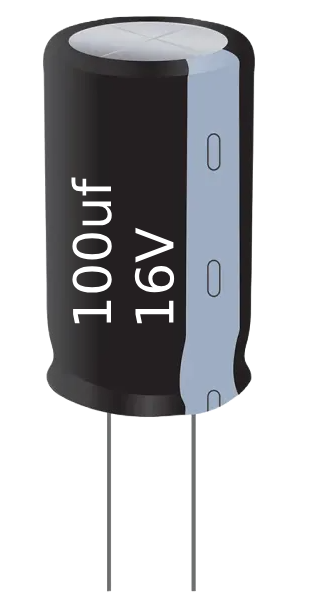
| 100µF 16V 电容 | 2 | — | 电源滤波 |
| 220µF 16V 电容 | 2 | — | 电源滤波 |
| 绿色LED | 4 | — | 状态指示 |
| 220Ω 电阻 | 4 | — | LED限流 |
| 1kΩ 电阻 | 3 | — | HC-05 RX引脚分压 (3.3V) |
| 洞洞板 | 1 | — | 焊接电子元件 |
| 2针接线端子 | 1 | — | 电源连接 |
| XH2.54 连接器 (4针x2, 6针x2) | 8 | — | 步进电机接线 |
| 公/母排针 | 若干 | — | 连接各模块 |
| 电源线 (GND/Vin) | 2 | — | 电路供电 |
| 焊锡丝 | 1 | — | 焊接 |
| 热缩管 | 10 | — | 绝缘保护 |
| 扎带 | 4 | — | 固定线缆 |
3D 模型
能力画像
⚪ 记忆与知识检索: 1/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
🔵 感知与观察: 2/5
🔵 数理与计算: 3/5
🔵 动手与操作: 4/5
⚪ 狂热与坚持: 2/5
🔵 创造与创新: 3/5
项目图库


所需技能
🔧 **动手能力**:需要熟练使用3D打印机、焊台、螺丝刀等工具进行组装和焊接。能够处理精细的电子元件和机械结构。
💻 **编程能力**:需要掌握Arduino IDE的使用,能够理解并修改C/C++代码,特别是PID控制算法和I2C通信协议。
⚡ **电子电路**:需要理解基本的电路原理,能够看懂电路图,并正确连接Arduino、传感器、电机驱动器和电源模块。
适用场景
**STEM教育**:作为学习机器人学、控制理论(PID)、嵌入式系统和3D打印技术的综合实践项目。
**创客/DIY爱好者**:适合有一定基础的电子和机械爱好者,体验从设计、制造到编程的完整项目流程。
**机器人竞赛入门**:可作为学习两轮自平衡机器人原理和控制的入门平台,为更复杂的机器人项目打下基础。