六自由度舵机机械臂Arduino扩展板
RoboticArmController
机器人电机驱动板、舵机驱动板
3/5
🧩 软硬件结合
已发布

项目简介
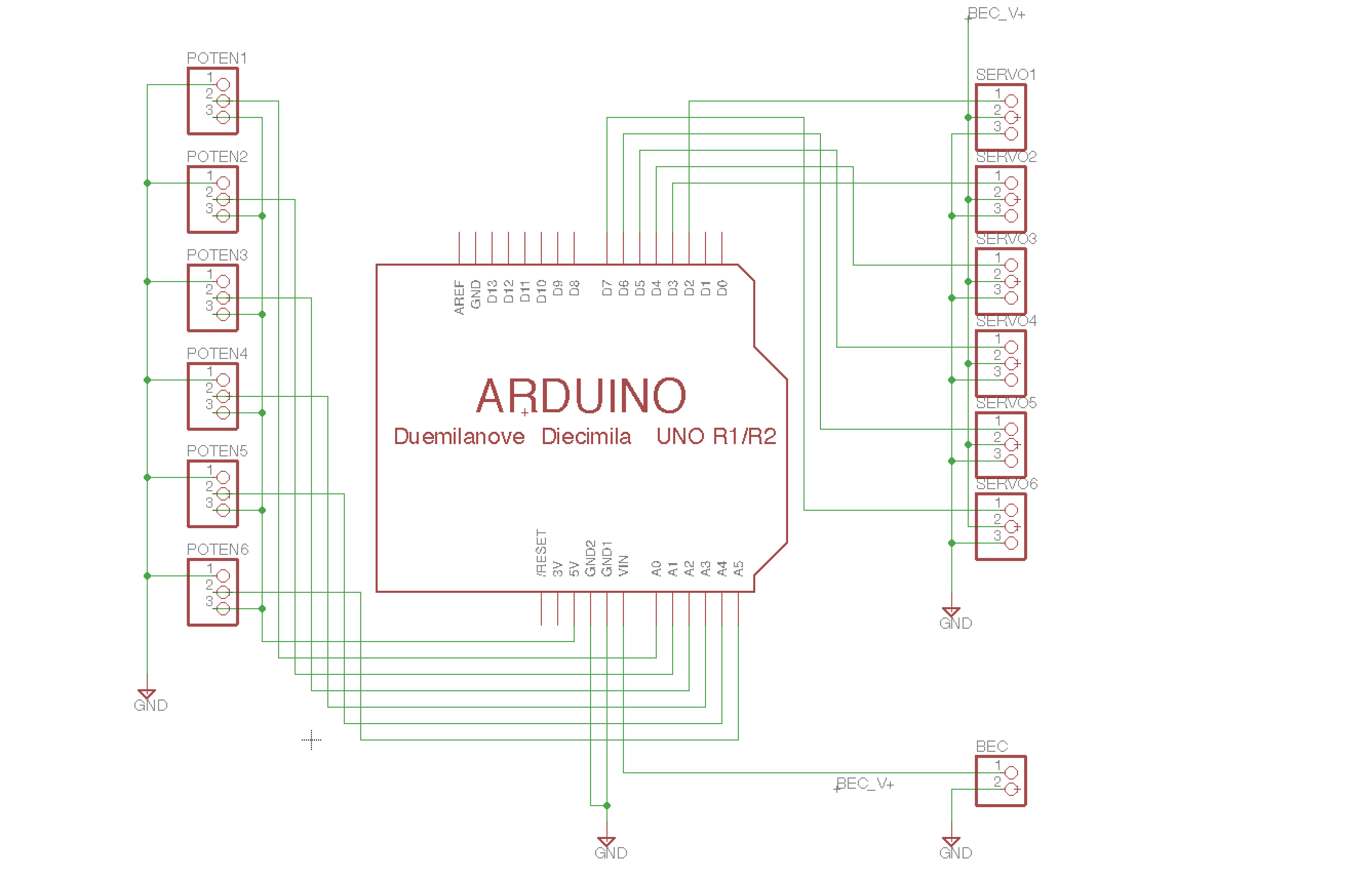
Arduino Uno的6自由度伺服机械臂扩展板。
这是一个基于Arduino Uno的6自由度(6 DOF)伺服机械臂控制扩展板开源项目。核心功能是通过6个电位器(10kΩ)分别控制6个舵机的角度,实现机械臂的实时手动操控。项目提供了完整的硬件方案:用户只需按照BOM清单准备Arduino Uno、万用板、排针、舵机延长线、BEC(5V/5A以上)和任意规格的锂电池,即可搭建出一套独立的机械臂控制系统。技术栈方面,硬件设计采用Eagle CAD绘制原理图,固件基于Arduino IDE编写,代码结构简洁,专为Uno优化但兼容多数Arduino开发板。项目解决了低成本、易复制的机械臂控制需求,尤其适合教育场景、创客空间或机器人入门爱好者。相比依赖复杂上位机或专用控制器的方案,这套系统仅用模拟输入直连舵机,极大降低了门槛。适用场景包括:教学演示机械臂运动学原理、小型桌面机械臂的离线示教、以及作为更复杂机器人项目的底层控制模块。项目遵循MIT开源协议,鼓励Fork和PR贡献,所有设计文件(原理图、PCB布局、源码)均公开在仓库中,用户可自行打样或修改。
项目特点
即插即用:直接插在Arduino Uno上,无需额外接线
6路舵机接口:支持6个独立舵机控制,实现多自由度运动
独立电源管理:板载电源接口,可为舵机提供稳定供电,避免干扰Arduino
开源硬件设计:提供完整的KiCad原理图和PCB文件,可自行修改和打样
配套Arduino库:有现成的控制代码,支持角度控制和PWM输出
紧凑布局:板子尺寸与Arduino Uno一致,方便安装到机械臂底座
技术规格
| 兼容主控板 | Arduino Uno R3 |
|---|---|
| 舵机通道数 | 6路 |
| 舵机信号类型 | 标准PWM(50Hz) |
| 舵机电源输入 | 5V~6V DC(独立供电) |
| 逻辑电源 | 由Arduino Uno的5V引脚供电 |
| PCB层数 | 2层 |
| PCB尺寸 | 68.6mm × 53.4mm(与Uno一致) |
| 接口类型 | 3pin排针(信号/VCC/GND) |
| 保护电路 | 电源反接保护二极管 |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| RoboticArmController扩展板 | 1 | — | 需自行打样或制作 |
| 3pin排针(公) | 6 | — | 用于舵机接口 |
| 2pin电源插座 | 1 | — | 用于外部舵机供电 |
| 排母(2.54mm间距) | 2排 | — | 用于插接Arduino Uno |
| 二极管(1N4007或类似) | 1 | — | 电源反接保护 |
| 100μF电解电容 | 1 | — | 电源滤波,稳定舵机供电 |
| 10kΩ电阻 | 1 | — | 可选,用于上拉/下拉 |
能力画像
**记忆与知识检索**:2/5 — 项目文档和代码结构清晰,但需要自行查阅舵机控制原理和Arduino基础
**动手与操作**:4/5 — 需要焊接PCB、连接舵机、组装机械结构,动手环节较多
**编程与算法**:3/5 — 提供现成Arduino代码,但若要实现复杂运动轨迹需编写算法
**设计与建模**:2/5 — 硬件设计文件已提供,但机械臂结构需要自行设计或寻找现成方案
**实验与调试**:3/5 — 需要调试舵机角度、电源稳定性以及机械臂运动协调性
**协作与分享**:2/5 — 项目为个人开源作品,社区参与度一般,但可自行fork改进
**学习与研究**:4/5 — 适合学习舵机控制、PCB设计、Arduino编程和机器人运动学基础
**系统集成**:3/5 — 需要将电子、机械、软件三部分整合,考验综合能力
项目图库
所需技能
基础的焊接技能
Arduino编程基础(C/C++)
舵机工作原理和PWM控制
基本的电路识图能力
机械结构组装能力
使用万用表进行简单电路测量
适用场景
机器人爱好者入门6轴机械臂制作
创客空间或学校的机器人教学项目
桌面级小型机械臂原型开发
Arduino扩展板设计的学习案例
自动化小实验(如物品抓取、分拣演示)