dgm 高性能FOC电机驱动器
dgm
机器人电机驱动板
3/5
🧩 软硬件结合
已发布
项目简介
开源高性能FOC电机驱动器。
dgm 是一个面向高性能伺服驱动场景的开源项目,旨在为机器人、AGV 和一体化伺服电机等应用提供紧凑、精确且易于二次开发的驱动器解决方案。项目完全开源了固件源码、电路原理图和3D模型,并配套了可视化调试软件 dgm_tool,极大降低了开发者从底层硬件到上层控制的入门门槛。
项目特点
基于高性能STM32 MCU,支持高速FOC运算
集成三电阻电流采样,实现精确的电流环控制
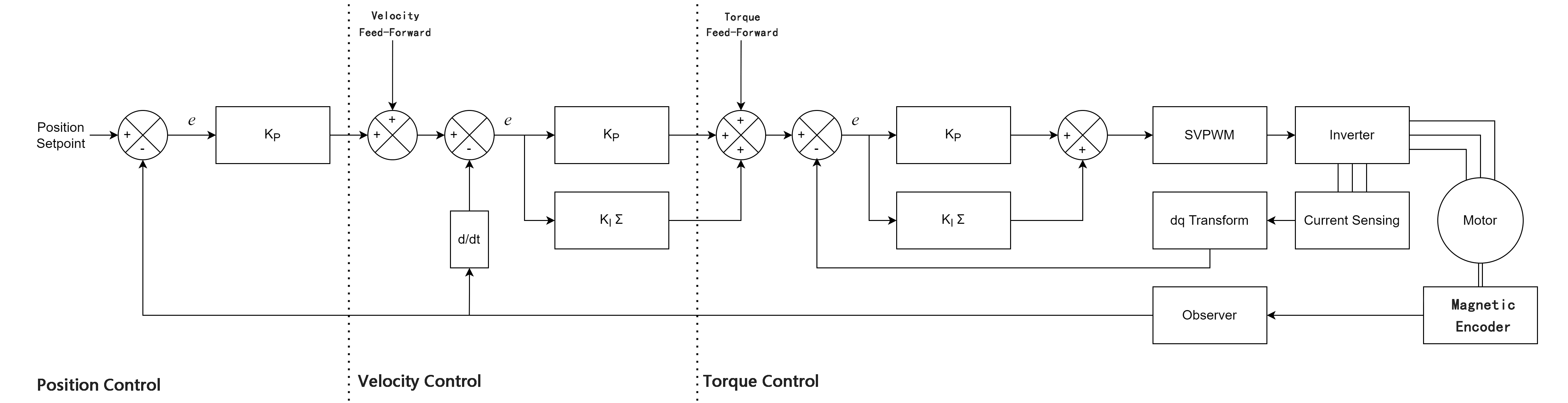
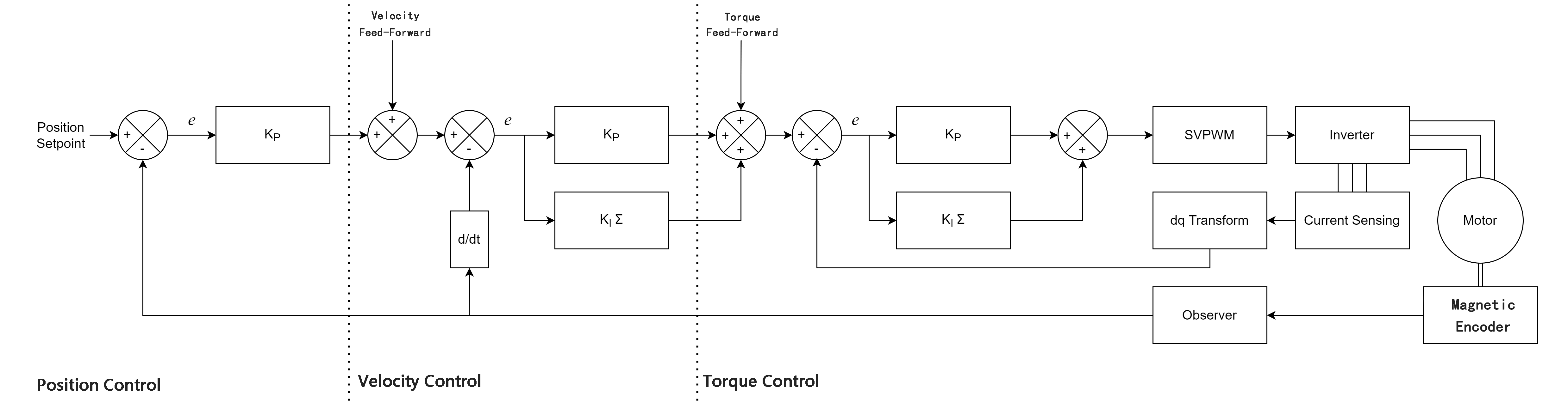
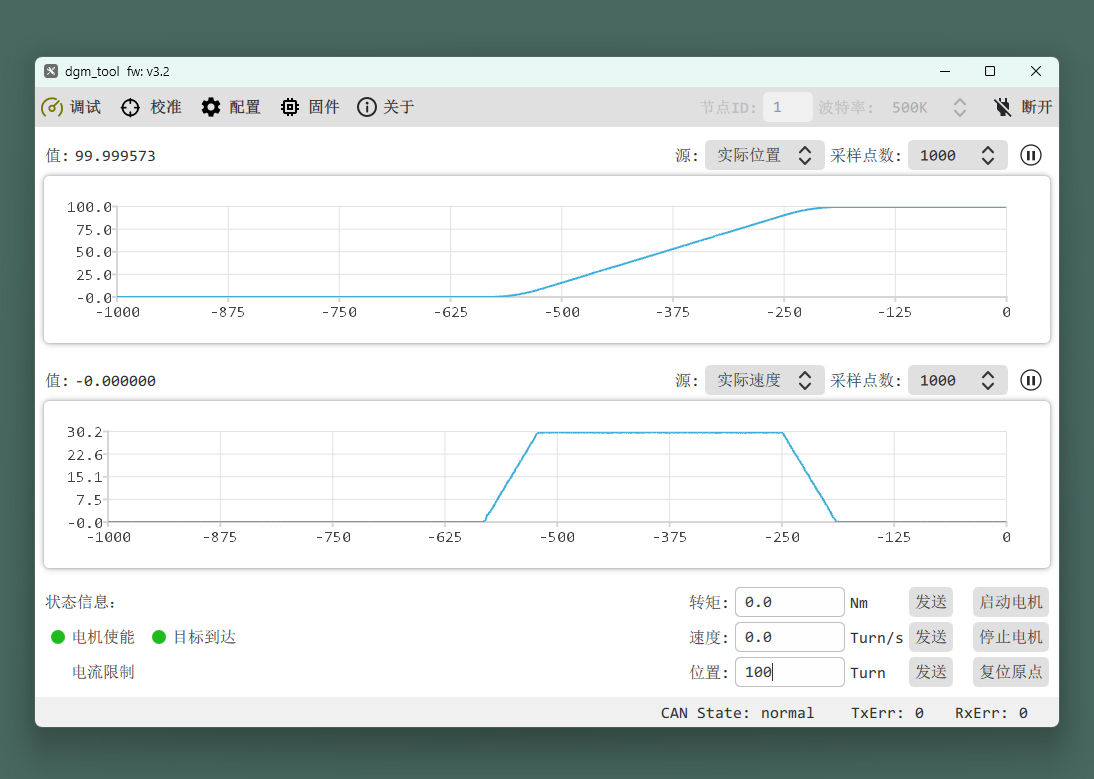
支持多种控制模式:力矩控制、速度控制、位置控制
开源硬件设计(原理图、PCB)和固件源码,易于二次开发
低功耗设计,适用于电池供电设备
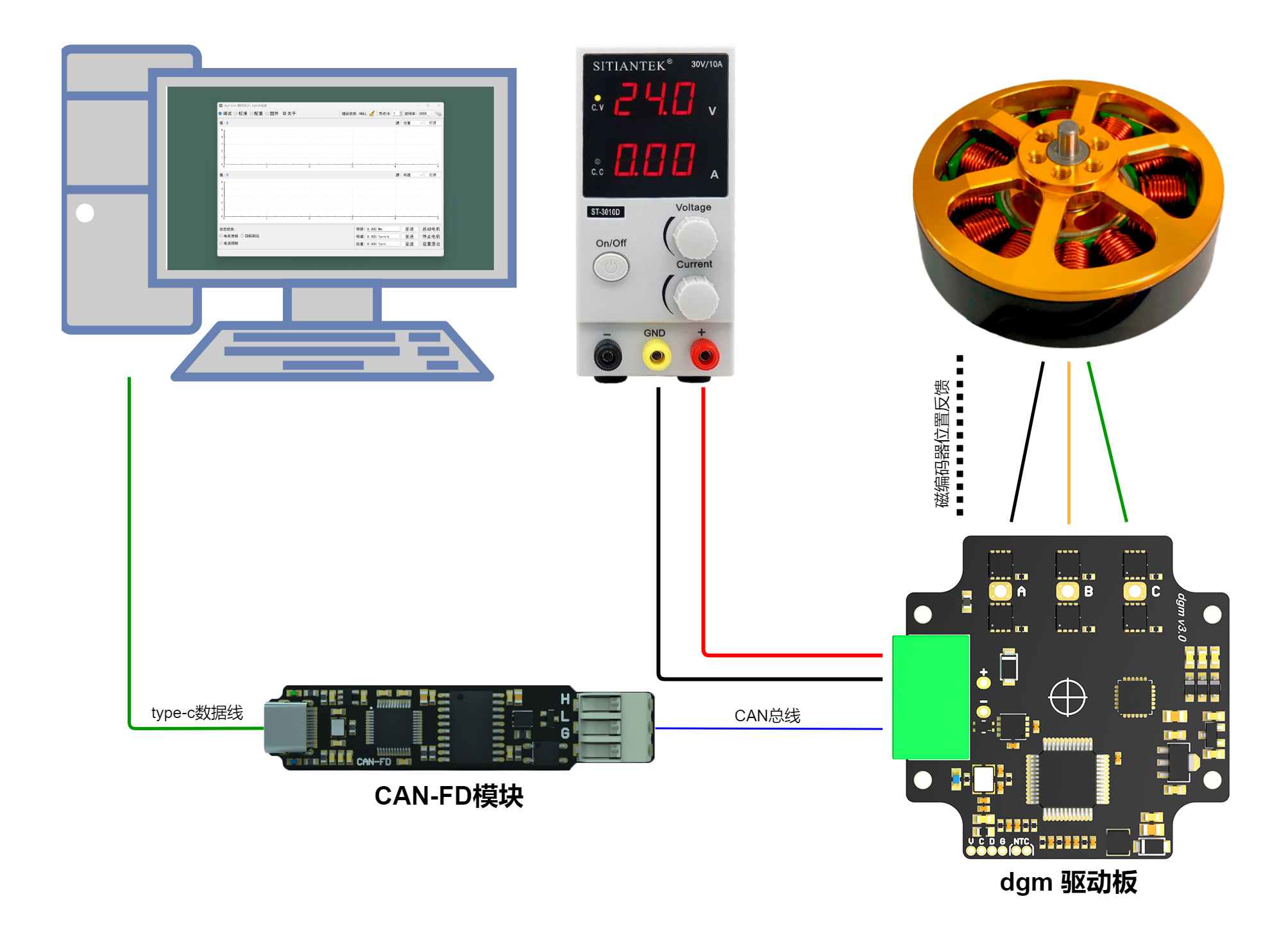
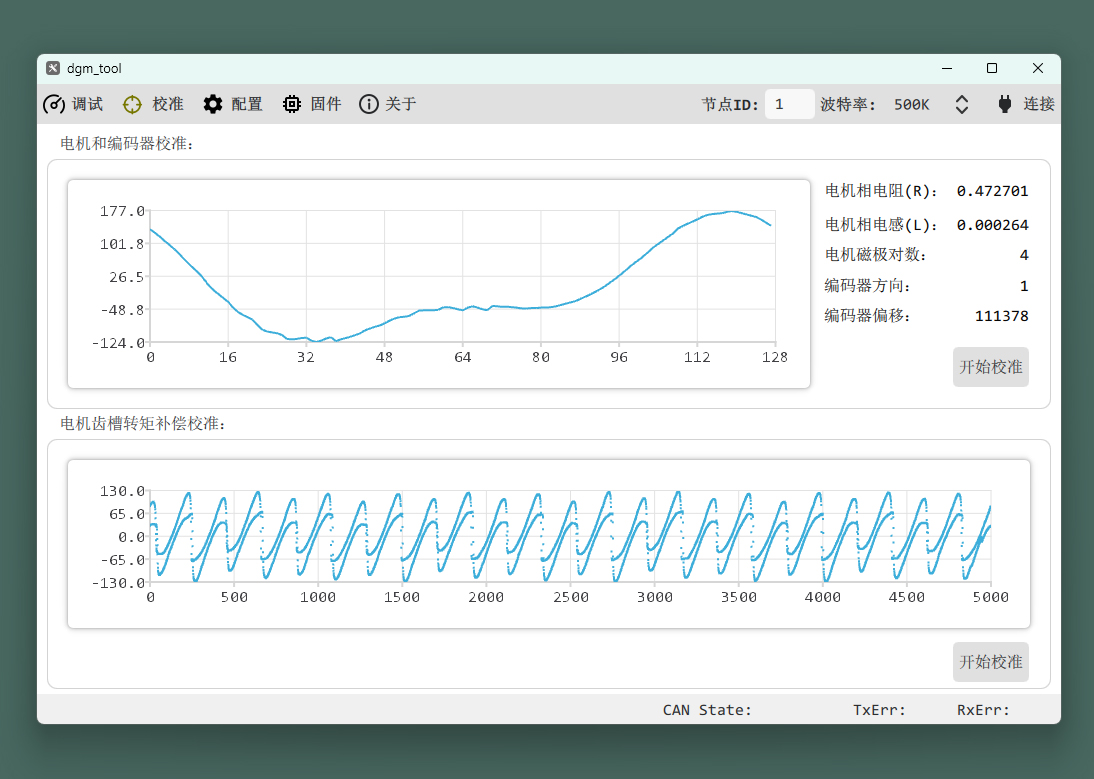
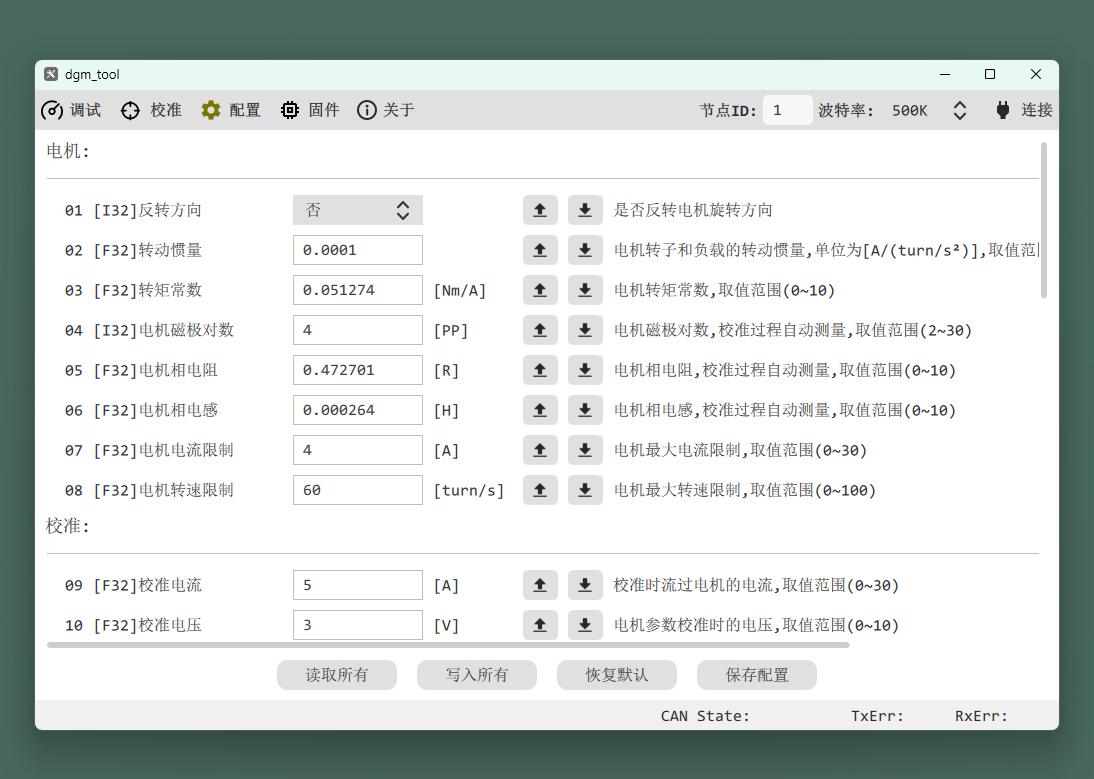
提供上位机调试工具,方便参数整定和实时监控
技术规格
| 主控芯片 | STM32F405RGT6 (ARM Cortex-M4, 168MHz) |
|---|---|
| 驱动芯片 | DRV8301 (三相栅极驱动器) |
| 功率MOSFET | N沟道MOSFET × 6 (如NCE3080K) |
| 供电电压 | 12V - 48V DC |
| 持续电流 | 10A (峰值30A) |
| PWM频率 | 20kHz - 40kHz (可配置) |
| 电流采样 | 三电阻低侧采样 (0.01Ω) |
| 通信接口 | CAN, UART, USB (虚拟串口) |
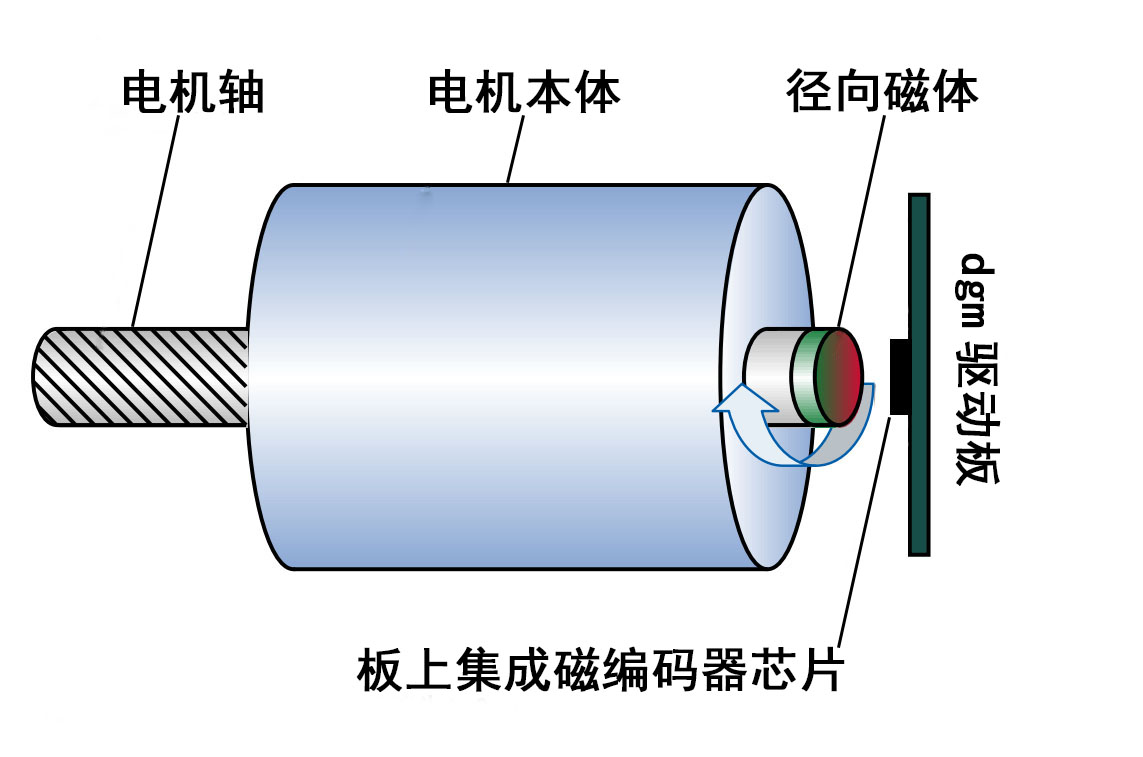
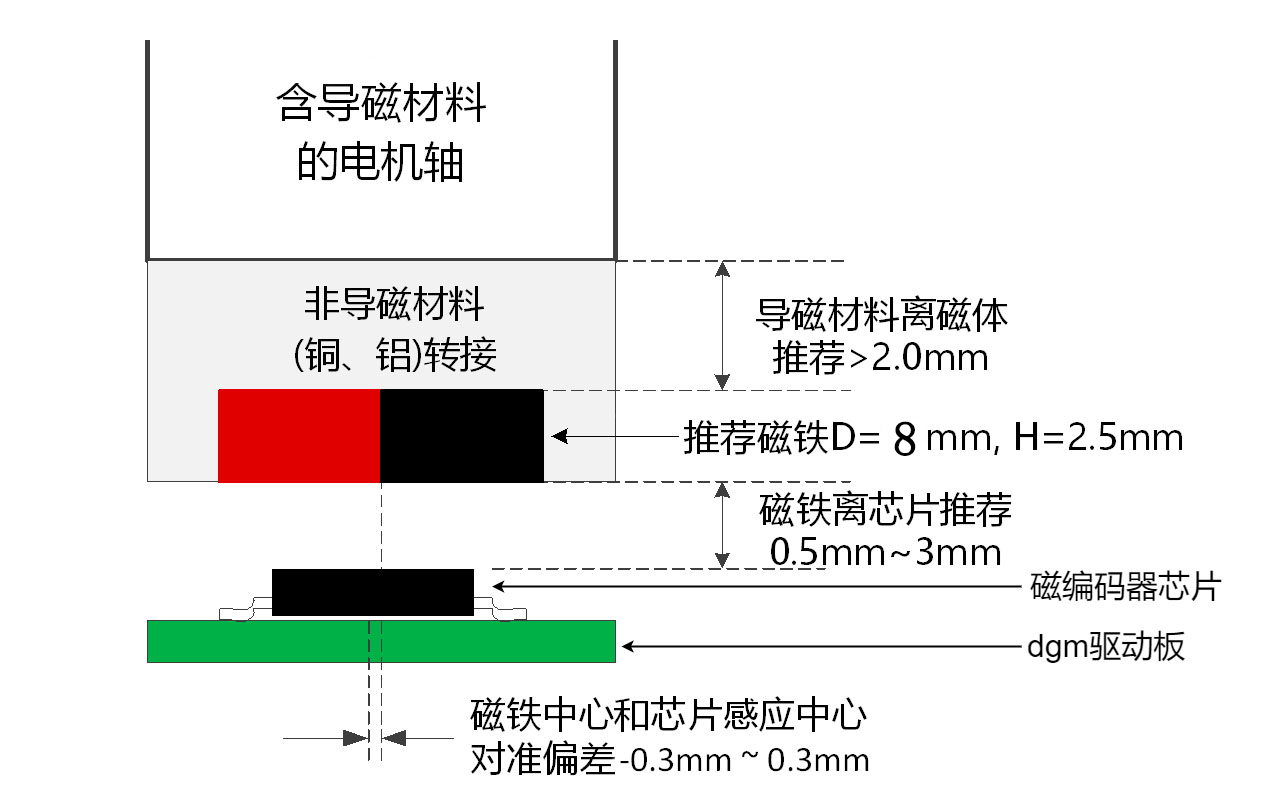
| 编码器接口 | 增量式编码器 (ABZ), 霍尔传感器 |
| PCB层数 | 2层 |
| 尺寸 | 约 50mm × 40mm |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| STM32F405RGT6 | 1 | — | LQFP64封装 |
| DRV8301 | 1 | — | 三相栅极驱动器 |
| NCE3080K | 6 | — | N沟道,30V/80A |
| 0.01Ω 电流采样电阻 | 3 | — | 2512封装,1%精度 |
| 100μF 电解电容 | 2 | — | 50V耐压 |
| 0.1μF 陶瓷电容 | 10 | — | 0805封装 |
| 2.54mm排针 | 若干 | — | 电源、信号接口 |
| 增量式编码器 | 1 | — | 可选,ABZ输出 |
| 霍尔开关 | 3 | — | 可选,120度安装 |
3D 模型
能力画像
**记忆与知识检索**:3/5 — 需要查阅FOC算法、STM32数据手册和DRV8301应用笔记,但资料集中且开源。
**动手与操作**:4/5 — 涉及PCB焊接、元件选型、电机接线和调试,需要一定的动手能力。
**编程与算法**:4/5 — 需要理解FOC控制算法(Clark/Park变换、SVPWM),并能修改C语言固件。
**设计与建模**:2/5 — 硬件设计已有参考,主要工作是理解和微调,无需从头设计。
**实验与调试**:4/5 — 需要调试电流环、速度环参数,使用示波器和上位机进行实时调整。
**协作与分享**:2/5 — 项目为个人开源,社区贡献较少,但可提交Issue或PR。
**学习与研究**:5/5 — 非常适合深入学习FOC原理、电机控制、嵌入式系统设计。
**系统集成**:3/5 — 可集成到机器人、无人机等系统中,但需要自行设计接口和通信协议。
项目图库






所需技能
基础电子知识(电路原理、元件识别)
焊接和手工贴片经验
C语言编程(STM32 HAL库或LL库)
理解FOC(磁场定向控制)基本原理
使用示波器和万用表进行调试
了解BLDC电机和编码器工作原理
基本的Git版本控制操作
适用场景
机器人关节电机驱动(如四足机器人、机械臂)
无人机电调(ESC)替代方案
电动工具(电钻、电锯)的精准控制
教学实验:学习FOC算法和电机控制
电动滑板、平衡车等个人出行设备
工业自动化中的小型伺服驱动