Ethersweep 以太网步进电机控制器
ethersweep
步进电机驱动板
3/5
🧩 软硬件结合
已发布
项目简介
开源易用的以太网步进电机控制器,基于FreeCAD、KiCAD和Arduino。
Ethersweep 是一个开源以太网步进电机控制器项目,旨在解决工业自动化、机器人控制及实验室设备中多电机远程协同控制的痛点。传统步进电机通常需要专用控制器或复杂接线,而 Ethersweep 通过标准以太网和 UDP 协议,让任何支持网络通信的设备(电脑、手机、树莓派、PLC 等)都能轻松控制 NEMA17 步进电机,且每台电机独立获取 IP 地址,理论上可无限扩展电机数量。
标签
项目特点
**以太网控制**:通过标准 RJ45 网络接口连接,使用 UDP 协议和 JSON 数据格式进行通信,易于集成。
**多电机支持**:每个电机拥有独立 IP 地址,可同时控制网络中的任意数量电机。
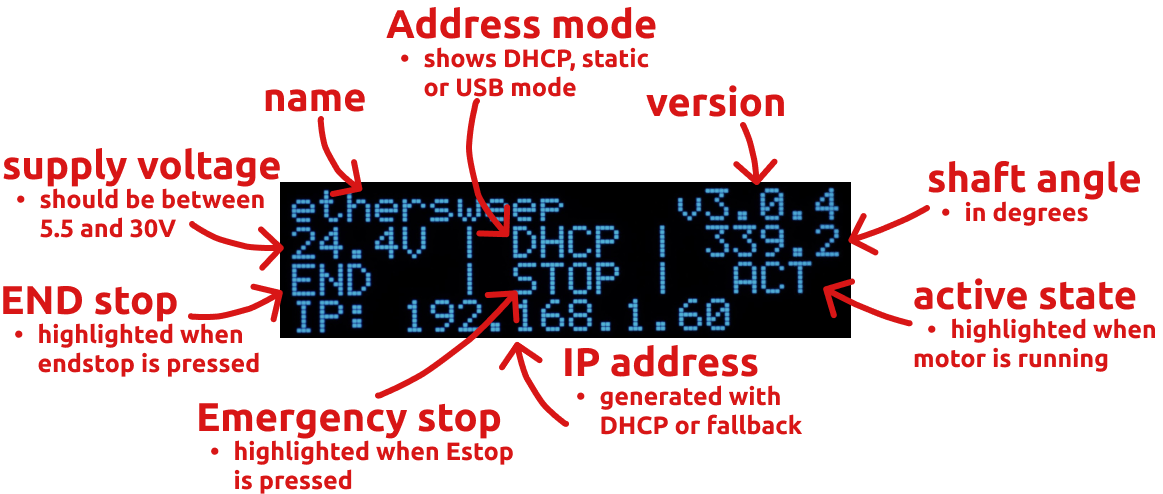
**即插即用**:支持 DHCP 自动获取 IP 地址,并在 OLED 显示屏上显示。
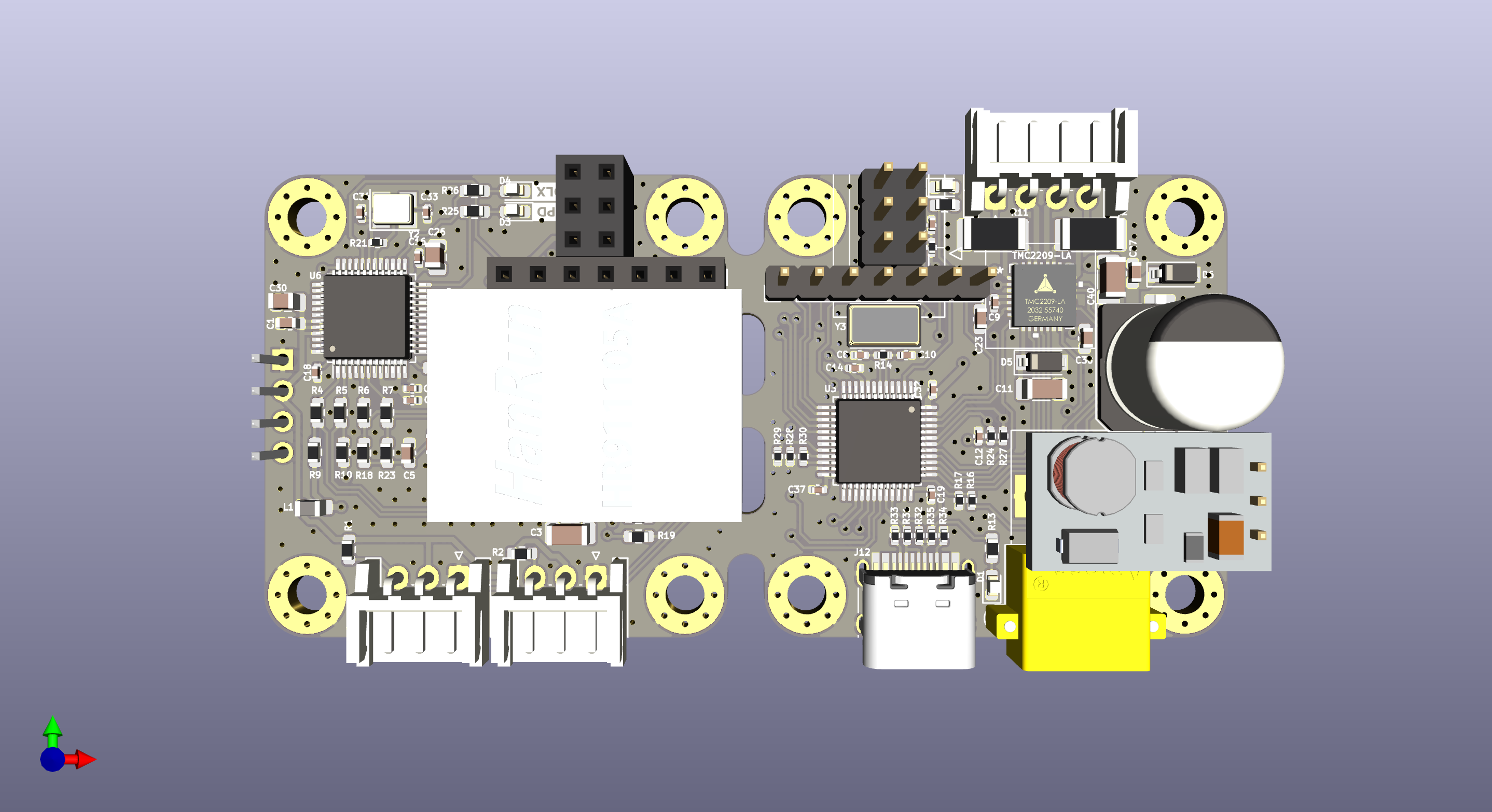
**高集成度**:控制器可直接安装在 NEMA17 步进电机上,结构紧凑。
**丰富接口**:提供 USB 编程接口、急停/限位开关输入、复位按钮。
**传感器反馈**:集成 AS5600 磁性旋转编码器,可获取位置反馈。
**开源设计**:硬件设计文件(FreeCAD、KiCAD)和固件代码(Arduino)完全开源。
技术规格
| 以太网控制器 | W5500 |
|---|---|
| 微控制器 | STM32f103 @ 72MHz |
| 步进电机驱动 | Trinamic TMC2209 |
| 磁性编码器 | AS5600 |
| 电源输入 | 5.5...30V DC (XT30 连接器) |
| 显示 | OLED 128x32 |
| 网络接口 | RJ45 |
| 编程接口 | USB |
| 输入 | 急停开关、限位开关 (JST 3-pin) |
| 电机兼容性 | NEMA17 步进电机 |
| 通信协议 | UDP / JSON |
项目资源
搜索资源
物料清单 (BOM)
| 物料名称 | 数量 | 参考价格 | 备注 |
|---|---|---|---|
| STM32f103 微控制器 | 1 | — | 核心芯片 |
| W5500 以太网控制器 | 1 | — | 网络通信 |
| TMC2209 步进电机驱动 | 1 | — | 电机驱动 |
| AS5600 磁性旋转编码器 | 1 | — | 位置反馈 |
| OLED 128x32 显示屏 | 1 | — | 状态显示 |
| XT30 电源连接器 | 1 | — | 电源输入 |
| RJ45 网络接口 | 1 | — | 网络连接 |
| JST 3-pin 连接器 | 2 | — | 急停/限位开关 |
| 复位按钮 | 1 | — | 复位功能 |
| 编码器磁铁 | 1 | — | 径向磁化,安装在电机轴上 |
| PCB 及被动元件 | 1套 | — | 详见生产文件 |
3D 模型
能力画像
⚪ 记忆与知识检索: 2/5
🔵 逻辑推演: 3/5
⚪ 表达与交流: 1/5
⚪ 感知与观察: 2/5
⚪ 数理与计算: 3/5
⚪ 动手与操作: 4/5
⚪ 狂热与坚持: 3/5
⚪ 创造与创新: 3/5
项目图库













所需技能
🔧 **动手能力**:需要基本的焊接技能(THT 和少量 SMD 焊接),以及组装和安装到电机上的能力。
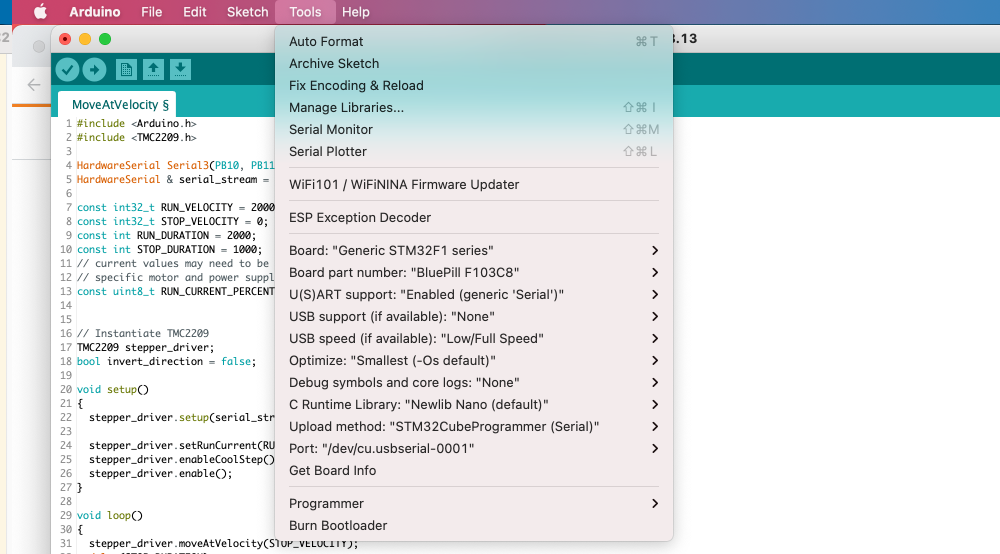
💻 **编程能力**:需要能够使用 Arduino IDE 或类似工具编译和烧录固件。了解 Python 以运行控制脚本。
⚡ **电子电路**:需要理解基本的电路原理,能够阅读原理图并进行故障排除。
适用场景
**多轴运动控制**:在实验室、自动化生产线或艺术装置中,需要通过网络同步控制多个步进电机。
**远程机器人**:构建可通过以太网远程控制的机械臂、线性滑台或旋转平台。
**DIY 数控机床**:作为低成本、网络化的步进电机驱动器,用于改造或构建小型 CNC 设备。
**物联网执行器**:作为物联网系统中的物理执行单元,接收来自云平台或本地服务器的指令。